
智能车辆障碍物识别与路径规划方法*
2022-01-06 11:11四川大学锦江学院机械工程学院唐小洁
数字技术与应用 2021年12期
四川大学锦江学院机械工程学院 唐小洁
无人驾驶中的自主导航问题是当前研究的热点之一,而避障和路径规划则是其中的核心问题。为了使智能车辆能够实现自主避障和最优路径规划,提出了一种基于数字图像处理和人工势场法的障碍物识别和路径规划算法。为了验证方案的可行性,在仿真软件中进行了仿真模拟测试,结果表明,采用这种方法能够正确识别障碍物,并使智能车辆能规划出最优路径,达到了自主避障并到达最终目标点的目的。
为了使智能车辆在未知环境中能无碰撞地自主从出发点移动到目标点,需要智能车辆具有识别障碍物和进行路径规划的能力。障碍物信息可利用图像传感器进行采集,并用数字图像处理技术进行图像处理。通过数字图像处理技术在被噪声污染的图像中提取出障碍物位置和重要特征,计算障碍物与目标点的距离和角度,利用人工势场法进行路径规划,寻找出最优路径。
1 障碍物识别
1.1 图像预处理
图像预处理主要用削弱图像无关信息,增强其有用信息,达到提高图像质量的目的。
1.1.1 图像滤波
在实际的行车环境中,可能存在雨雪等颗粒状的噪声信号干扰障碍物的提取,因此在图像处理过程中加入椒盐噪声模拟真实环境,然后利用中值滤波算法滤除噪声。中值滤波法[1]的原理是对像素点所在邻域内的像素灰度值排序,并将该像素点灰度值设置为邻域内所有像素点灰度值的中间值。

通过图1对比发现,中值滤波算法能较好地在滤除椒盐噪声的同时保留图像边缘细节。

图1 图像滤波Fig.1 Image filtering
1.1.2 图像二值化
图像二值化[2]是一种常见的图像处理算法,其将像素点灰度值在阈值以上的置为1,其余的置为0,本文的二值化阈值由最大类方间法获得。二值化可以简化并加速图像的数据处理,得到的二值化图像经过进一步处理还可以得到几何特征更加精准化的图像目标。图2为二值化后的图像。
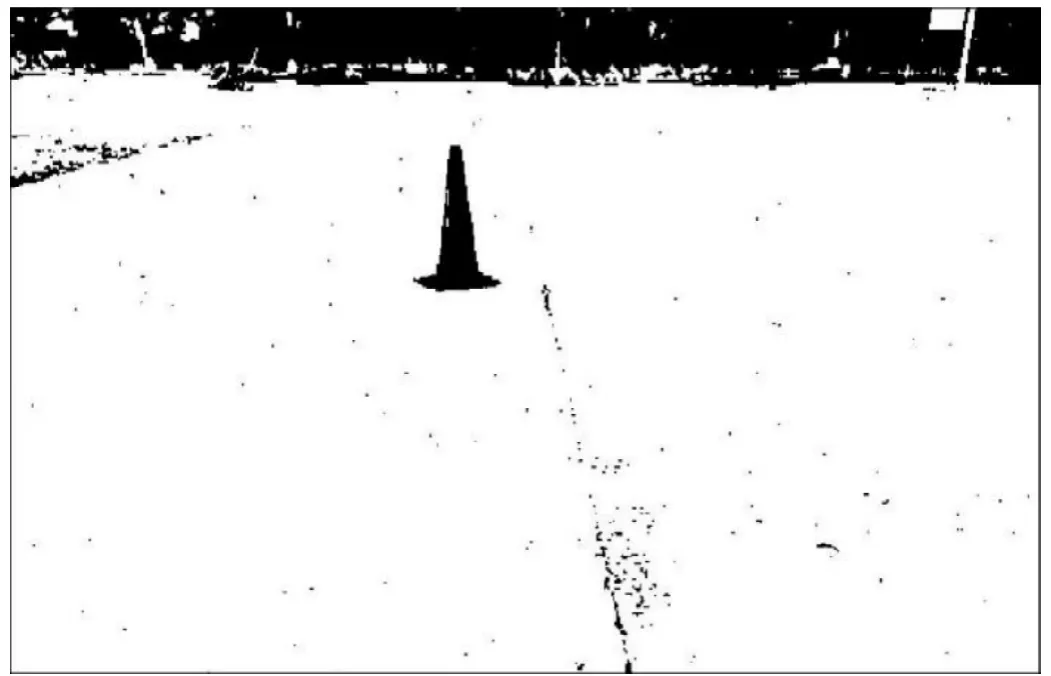
图2 图像二值化Fig.2 Image binarization
1.2 图像形态学处理
观察二值化图像,发现在白色区域中有一些小颗粒噪声,以及障碍物上有一些小空洞,因此可以利用数学形态学来做进一步的图像处理。数学形态学[3]以数学中的集合为基础,利用特定形态的结构元素去探测目标形状,其基本操作包括膨胀、腐蚀、开运算和闭运算。
本文采用先开运算后闭运算的方式对二值化图像进行进一步处理。先腐蚀后膨胀的过程称为开运算[4],可以在不明显改变目标物体面积的前提下消除细小噪声、分离细小连通区域、平滑轮廓线。先膨胀后腐蚀的过程称为闭运算,可以填充目标物体内小空洞、平滑轮廓线。图像A在结构元素即邻域B的作用下,其开运算和闭运算的数学表达式分别为:

由图3可见,经过形态学处理后,障碍物中的小空洞和背景中的细小噪声被消除了,轮廓线变得更加平滑。

图3 图像形态学处理Fig.3 Image morphological processing
1.3 图像边缘检测
障碍物边缘反映了障碍物的形状特征,利用障碍物边缘检测可以将障碍物从背景中分割出来。常见边缘检测算子[5]有:Prewitt算子、Sobel算子、Rober算子、Canny算子、LoG算子等。本文采用了Canny算子对经形态学处理后的障碍物边缘进行增强识别,如图4。

图4 图像边缘检测Fig.4 Image edge detection
1.4 障碍物提取
为了识别出障碍物,可通过求出包含障碍物的最小外接矩形来提取障碍物。最小外接矩形[6]是包含了障碍物所有点线面的面积最小的矩形。找出障碍物所在的闭合连续区域,用最小外接矩形法将障碍物框定出来,这样就把障碍物位置反映出来了,如图5。
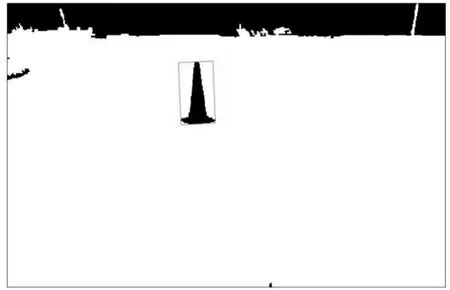
图5 障碍物提取Fig.5 Obstacle extraction
2 智能车辆路径规划
检测出障碍物后,智能车辆可采用人工势场法进行路径规划实现自主避障。人工势场法[7-8]的基本思想是移动车辆在目标点对它的引力场和障碍物对它的斥力场的共同作用下,避开障碍物最终到达目标点。
2.1 引力场
引力场函数为:

式中:ξ为引力尺度因子;ρ(q,qgoal)表示车辆当前位置q与目标点位置qgoal的距离,
引力是引力场对距离求导:

车辆距离目标点越近,引力越小。
2.2 斥力场
斥力场函数为:

式中:η为斥力尺度因子;ρ(q,qobs)代表车辆与障碍物之间的距离;0ρ表示每个障碍物的影响半径。
斥力是斥力场对距离求导:

车辆距离障碍物越近,斥力越大。
因此,当车辆距离目标点和障碍物都很近的时候,会因引力过小而斥力过大引起目标不可达问题。所以可将车辆与目标点之间的距离[9]加入斥力场函数中:

式中:nρ为移动车辆与目标点的距离的n次方,n为正系数,通常取2;L为移动车辆中心到顶点的距离。相应斥力变为:

其中Frep1的方向从障碍物指向移动小车,Frep2的方向从移动车辆指向目标点。
2.3 仿真
在MATLAB中建立仿真环境,用圆形和矩形代表障碍物,五角星代表起点和目标点。通过软件编程将移动车辆与目标点之间的距离、角度、引力,以及移动车辆与障碍物之间的距离、角度、斥力计算出来,并用得到的合力值来确定车辆的移动方向和新的位置坐标值。当车辆与目标点之间的距离小于设定阈值时,则认为移动车辆已经到达设定目标点,路径规划结束。
从图6仿真结果可以看到,移动车辆能避开障碍物规划出最短路径,并能在目标点附近有大型障碍物、斥力很大时,也能最终到达目标点。

图6 车辆避障与路径规划结果Fig.6 Results of vehicle obstacle avoidance and path planning
3 结语
为了使智能车辆实现自主导航功能,无碰撞地从起始点移动到目标点,本文采用了图像传感器和数字图像处理算法对障碍物进行探测提取,并将人工势场法引入到导航系统中以实现最优路径规划。在数字图像处理中利用了数学形态学算法和边缘提取算法,在人工势场法中改进了斥力场函数。为了验证这种方法的可行性,在MATLAB中进行了相应的模拟测试,结果表明此种方法合理有效,能够完成自主导航。
引用
[1] 张利平,潘宏侠,黄晋英.智能车辆视觉系统的障碍物边缘检测[J].计测技术,2006(4):29-31.
[2] 张一飞,李新福,田学东.基于图像分割的立体匹配算法[J].计算机应用,2020,40(5):1415-1420.
[3] 石玉敏.基于数学形态学的船舶图像质量提升方法[J].舰船科学技术,2021,43(16):157-159.
[4] 雒娟花.基于图像处理的障碍物检测系统研究[D].西安:西安科技大学,2009.
[5] 黄时杰,曾建华.图像边缘检测与分割的MATLAB实现[J].赤峰学院学报(自然科学版),2019,35(9):47-49.
[6] 杨蔺.航拍绝缘子图像识别及故障检测方法设计与研究[D].重庆:重庆邮电大学,2020.
[7] Khatib O.Real time obstacle avoidance for manipulators and mobile robots[J].The International Journal of Robotics Research,2003,2(5):500-505.
[8] 安林芳,陈涛,成艾国,等.基于人工势场算法的智能车辆路径规划仿真[J].汽车工程,2017,39(12):1451-1456.
[9] 唐小洁,丁一航,申勤,等.改进人工势场法的移动小车动态避障路径规划[J].软件导刊,2019,18(10):152-156+225.
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
小学生导刊(2018年34期)2018-12-18
中国继续医学教育(2015年2期)2016-01-06
振动、测试与诊断(2014年6期)2014-03-01
延河(下半月)(2014年3期)2014-02-28
城市道桥与防洪(2014年5期)2014-02-27
现代检验医学杂志(2014年1期)2014-02-06
现代检验医学杂志(2014年5期)2014-02-02
