三电平城轨能馈装置中点电位平衡控制策略研究
2021-12-31 03:19张润泽崔扬王海瑞曹虎孙国斌
电气传动 2021年22期
张润泽,崔扬,王海瑞,曹虎,孙国斌
(中车青岛四方车辆研究所有限公司,山东 青岛 266000)
城市轨道交通具有载客量大、运行速度快的特点,在城市公共交通中发挥着不可或缺的作用。牵引供电系统作为供给机车电能的重要组成部分,是保证机车运行安全稳定的基本条件。现有地铁牵引供电网络关键部件为由二极管组成的24脉波不控整流机组,其构成简单、可靠性好,但实际应用中也存在输出电压随负载工况变化较大、能量只能单向流动等缺点[1-3]。能馈装置作为城轨牵引变电所的补充装置,可以起到回馈列车再生制动能量到上级电网以及稳定牵引网网压的作用,近年来已有越来越多的学者针对能馈装置进行研究[4],能馈装置本质上是一种三相四象限变流器,其电路拓扑结构配合软件算法,可以保证其工作在功率因数为“1”的整流模式或功率因数为“-1”的逆变模式;文献[5]针对能馈装置的结构设计,提出了一种功率模块并联扩容方案,其着重于并联环流的抑制,并未针对控制本身进行详细讨论;文献[6]针对能馈装置算法进行了优化,该算法提高了能馈装置的动态响应;文献[7]基于实际线路数据,分析了能馈装置在轨道交通应用上节能的有效性;现有文献普遍关注能馈装置拓扑优化及控制优化,并未针对实际工况下,能馈装置只工作在馈电模式进行详细分析。
本文针对三相三电平能馈装置展开讨论,三电平拓扑结构相较于两电平拓扑可以获得更优异的谐波性能,但中点电位不平衡将带来输出电压波形畸变、逆变器开关器件承受的电压不均衡、电容的寿命降低等危害,文献[8]通过增加硬件来控制中点电位平衡,文献[9]采用中点电位控制因子对中点点位进行控制,中点电位平衡后存在一定震荡。文献[10-11]介绍了基于零序分量注入的三电平SVPWM方法,该方法在实现三电平脉冲生成上较为简单,但不利于进行中点电位平衡控制。本文将基于矢量扇区的三电平SVPWM调制策略,通过调节首发短矢量作用时间进行中点电位调节。
本文第1节将介绍能馈装置在地铁变电所中的实际工况及其控制方法,第2节将介绍基于三电平SVPWM的能馈装置中点电位控制算法,第3节将通过实验对能馈装置的算法进行验证,最后对全文做出总结。
1 城轨能馈装置工作原理
带有能馈装置的城轨牵引变电所结构如图1所示。
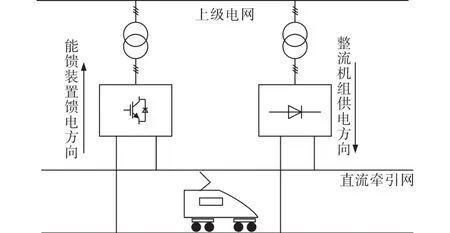
图1 城轨牵引变电所结构图Fig.1 Structure diagram of urban rail traction substation
相较于传统的只含有整流机组的牵引变电所,能馈装置通过独立变压器实现并网,在列车牵引供电时不投入,只作为整流机组的备用,在列车制动时启动,实现能量向电网的回馈,即只工作在功率因数为“-1”的逆变模式。
本文研究三相三电平四象限能馈装置结构图如图2所示,其中,L为交流侧电感;C1,C2为直流侧电容;Udc为直流侧电压。三电平拓扑结构可以降低开关器件耐压,同时获得更好的谐波性能。
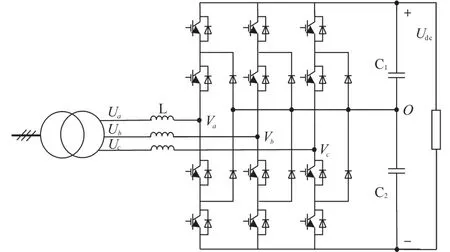
图2 三相三电平四象限变流器结构图Fig.2 Structure diagram of three phase-three levelfour quadrant converter
1.1 能馈装置基本控制方法
能馈装置基本控制算法一般采用基于同步旋转坐标系的d-q解耦控制算法,其基本数学模型如下式所示[12-13]:
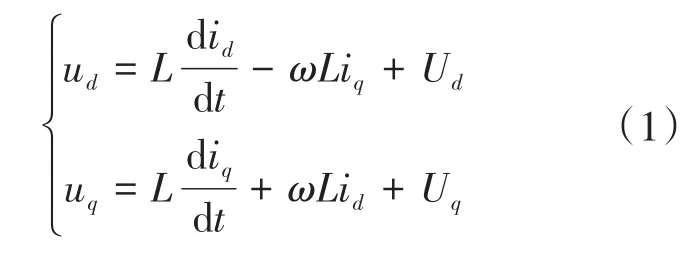
式中:ud,uq为同步旋转坐标系下网侧交流电压分量;id,iq为同步旋转坐标系下网侧交流电流分量;Ud,Uq为同步旋转坐标系下桥臂交流电压分量;ω为电网角频率;L为网侧交流电抗器。
该系统交流侧接上级电网变压器副边,直流侧并入城轨直流牵引网。
由上述d-q坐标系下的数学模型可见,三相电流的d,q轴电流分量id,iq互相耦合,为方便控制器设计,在此引入电流前馈解耦控制,电流调节器采用PI控制器,此时三相整流器电压指令为
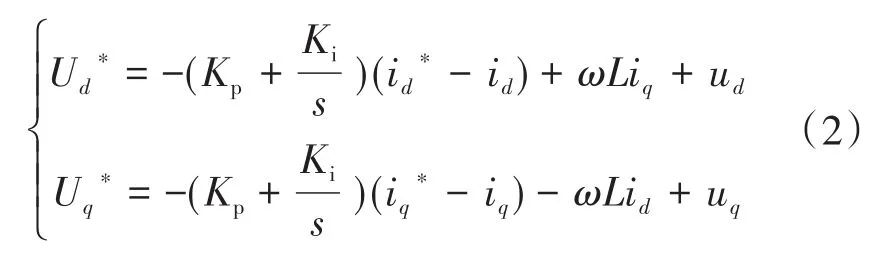
式中:Kp,Ki分别为电流环比例与积分调节增益;分别为d,q轴电流环目标值。
由电压外环与电流内环构成的系统控制框图如图3所示。相较于两电平拓扑的调制策略,三电平SVPWM调制方法较为复杂,本文采用三电平SVPWM调制方法完成控制比较值的生成,具体在第2节进行详细介绍。
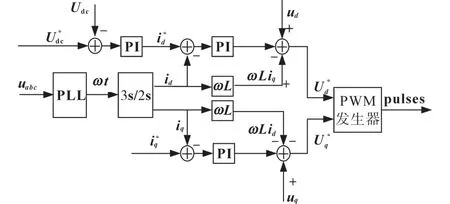
图3 能馈装置基本控制框图Fig.3 Control block diagram of energy feedback devices
1.2 纯能馈模式控制判据给定策略
1.1小节所示的控制策略,适用于工作在四个象限的工作模式,即无论能量的流动方向如何,都可以使直流侧母线电压稳定在目标值,同时保证单位功率因数。但在能馈装置的实际工况中,其要求在列车牵引时停机,在列车进入再生制动阶段,网压被抬升至一定值时才介入工作,将能量回馈到上级电网的同时稳定牵引网电压。
根据能馈装置的实际工况,结合图3所示的能馈装置基本控制算法,给定变流器工作在纯能馈模式的控制判据如下:


式中:Pstop为系统封脉冲停机功率为系统停机d轴电流指令值。该方式可保证能馈装置在固定功率下执行停机指令。
结合上述能馈模式控制判据及能馈的实际工作模式,其一个工作循环下,“列车再生制动功率-牵引网网压-能馈装置启动与停机判据”关系示意图如图4所示。
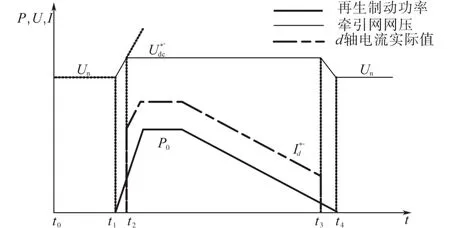
图4 纯能馈模式工况示意图Fig.4 Working condition diagram of energy feedback mode
2 基于中点电位平衡的三电平SVPWM调制方法
2.1 三电平SVPWM简介
采用三电平拓扑的三相变流器,其开关状态可用如图5所示的空间矢量图表示。根据图5所示的矢量长度不同,可将矢量分为长矢量(如pnn)、中矢量(如pon)、短矢量(如poo)、零矢量(如ooo),设一相四个管子从上到下依次为1,2,3,4管,其中p表示1,2管同时导通情况;o表示2,3管同时导通的情况;n表示3,4管同时导通的情况[14-15]。
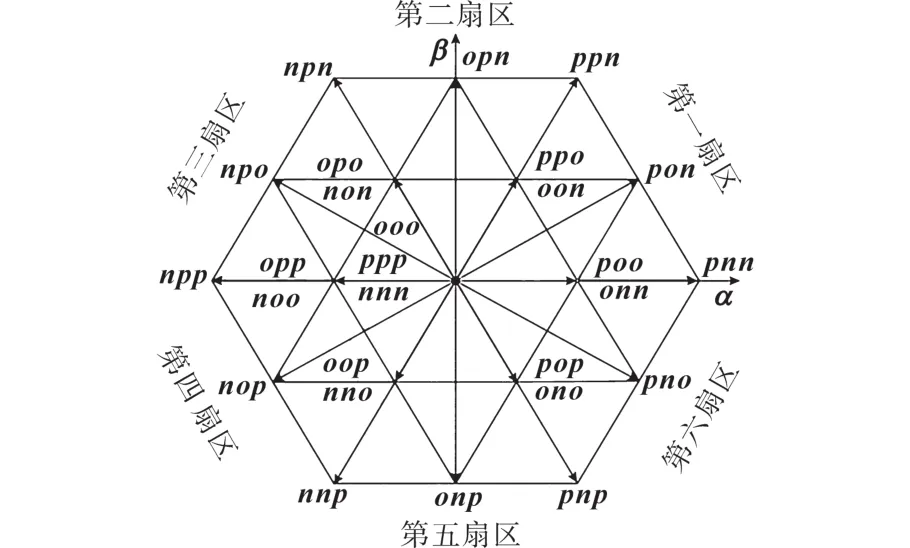
图5 三电平SVPWM矢量区域划分Fig.5 Three-level SVPWM vector area
以七段式SVPWM调制方法为例,由于每个短矢量均由两种状态构成,因此每次重构目标矢量时,均以短矢量为首发矢量,其中目标矢量来由图3所示的Ud*与Uq*进行坐标变换得到。
以目标矢量落在如图6所示的第一大扇区第4小区为例,其矢量动作顺序依次为oon pon poo ppo poo pon oon,设oon,pon,poo三个矢量作用时间依次为T1,T2,T3,则有:

式中:Ts为开关周期。
图6 第一扇区矢量图Fig.6 Vector diagram of sector one
由图6可知,当目标矢量落在第一大扇区第4小区时,可列写方程如下:
式中:Udc为能馈装置直流母线电压;Uref为目标矢量幅值;θ为目标矢量相角。
结合式(5),可解得:
式中:Uα,Uβ为图3中经坐标变换后的幅值。
同理可求得目标矢量落在其余矢量区间内时的各分矢量作用时间。
根据七段式PWM工作原理,设在前半个开关周期内,矢量变换时间节点分别为T01,T02,T03,对首发短矢量进行平均分配,其与矢量作用时间T1,T2,T3的关系如下式所示:根据落在不同区间内的矢量作用顺序,即可确定各开关管的工作状态。
2.2 基于三电平SVPWM中点点位平衡调制策略
三电平电路拓扑中点电位不平衡问题,本质上是由于直流侧串联电容中点电流Io流入、流出所导致。
设Io由直流侧流入变流器侧方向为正,三相电流Ia,Ib,Ic由变流器流入交流电源方向为正。当Io>0时,下侧电容放电,上侧电容充电;当Io<0时,下侧电容充电,上侧电容放电。因此,根据直流侧两个电容的电压关系及对应矢量区的Io电流方向,即可调整中点电位。
根据2.1小节所示的三电平SVPWM矢量作用原则,在各小扇区内,所选取的首发短矢量与直流侧中点电容电流Io的关系如表1所示。
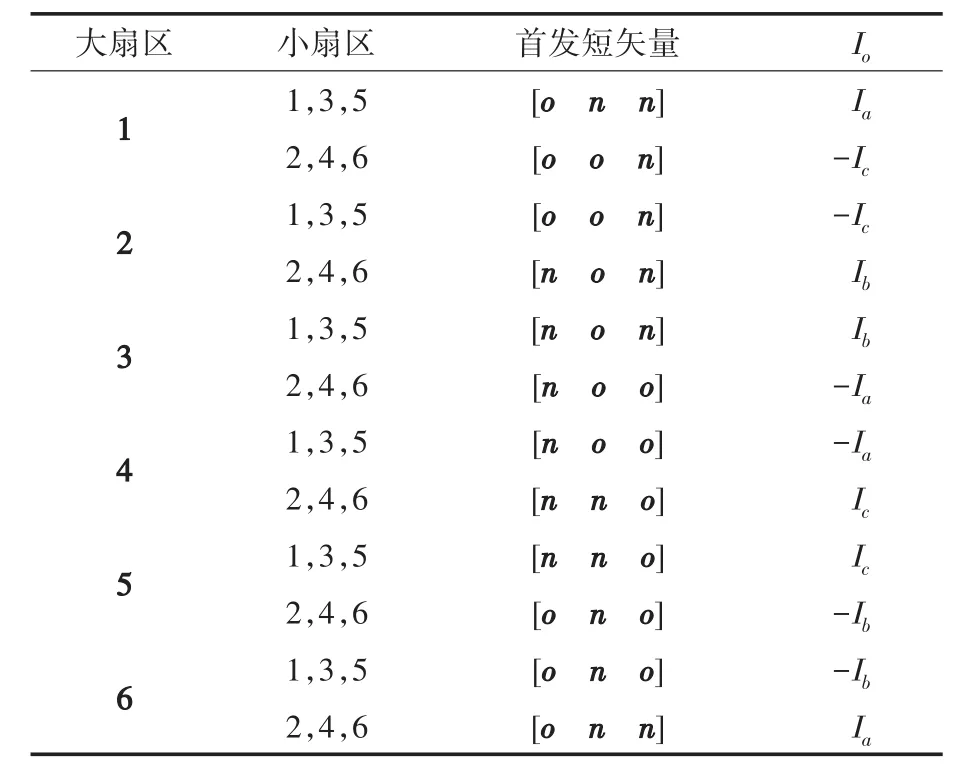
表1 短矢量选取与中点电流Io关系表Tab.1 Relationship between short vector selection and Io
设置U1为直流侧上侧电容电压,U2为下侧电容电压。
当U1>U2时,分Io两种状态讨论:
1)Io>0,需要减小下侧电容放电时间,即减小首发短矢量状态的作用时间;
2)Io<0,需要增加下侧电容充电时间,即增加首发短矢量状态的作用时间。
当U1<U2时,对应工作原理相似。
根据上述原则,可以设计中点电位调节PI控制器,其输出作为中点电位调节系数k(-0.5<k<0.5),叠加到首发短矢量初始状态的时间计算上,进行作用时间的重分配。根据矢量区及匹配的首发短矢量状态,选择中点电位调节系数的作用方式,作用框图如图7所示。
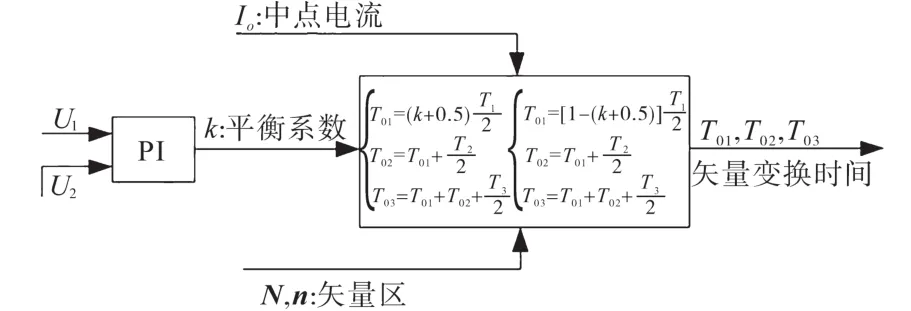
图7 中点电位控制器设计Fig.7 Design of neutral point potential controller
根据重新分配得到的矢量状态变换时间节点,即可控制中点电位平衡。
3 仿真与实验验证
3.1 中点电位平衡算法仿真验证
在Matlab环境下搭建如图2所示的三相三电平电路,在稳态1.5 s时刻加入中点电位平衡算法,直流侧串联电容电压仿真结果波形图如图8所示。

图8 直流侧串联电容电压波形Fig.8 Waveforms of series capacitor voltages on DC side
从图8可以看出,在中点电位算法投入前,两个电容电压存在固有偏差,且存在明显震荡。在1.5 s投入中点电位平衡算法之后,两电容电压交替升降,中点电位处于动态平衡之中。
3.2 能馈模式及中点电位平衡算法实验验证
为模拟实际城轨牵引变电所工况,本文实验环境以图1所示能馈装置+整流供电机组电源架构为基础,搭建如图9所示的实验环境。
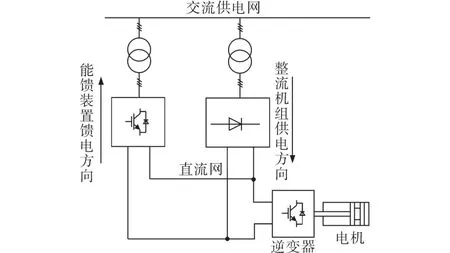
图9 实验室实验环境示意图Fig.9 Schematic diagram of laboratory experiment environment
实验中,利用电机的牵引与制动模拟列车线上的牵引与制动,电机牵引时由整流机组供电,制动时能量由能馈装置回馈到上级电网,电机制动的峰值功率约600 kW。电机牵引时,直流网压下跌至1 400 V附近,电机制动时直流网压抬升,当电压抬升至1 700 V附近时,能馈装置启动,将网压稳定在1 700 V。
利用数据采集设备采集的实验波形如图10所示。
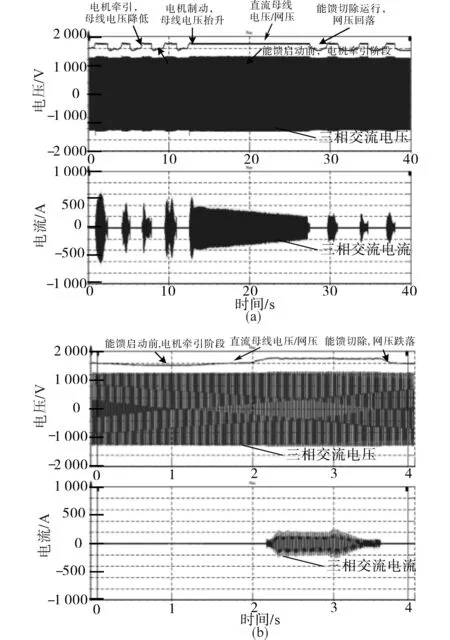
图10 纯能馈模式工作波形图Fig.10 Waveforms of energy feedback mode
图10a为电机短时间内频繁牵引与制动时,直流网压与交流电压、电流波形图,此时能馈装置可以稳定工作。在电机牵引时网压降低,能馈装置不动作;在制动时,网压上升,当电压达到能馈装置启动阈值时,能馈装置介入,将能量回馈到上级电网,并稳定牵引网电压。图10b为某次电机牵引转制动时,能馈装置的直流网压与交流电压、电流详细波形图,在能馈启动前,直流网压有一段明显下降,此阶段为电机牵引阶段,整流机组的供电特性导致网压有所下降,随着电机由牵引转为制动,能馈装置稳定地投入运行,稳定网压,随着制动状态进入末端,当制动功率下降到一定值时,能馈装置切除运行,网压随之跌落回整流机组供电电压。
在图10b所示的工况下,基于三电平SVPWM的中点电位平衡调节算法,得到中点电位波形图如图11所示。图11a为直流侧串联电容电压上、下侧波形图,图11b为上、下侧电容电压差值波形图,可以看到中点电位平衡算法的有效性。
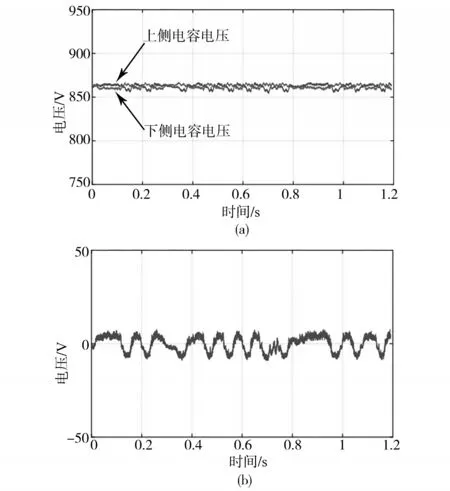
图11 中点电位波形图Fig.11 Waveforms of neutral point potential
4 结论
本文针对城市轨道交通中能馈装置只工作在列车再生制动的工况,提出了纯能馈工作模式的判据给定策略,同时基于三电平能馈装置电路拓扑,提出了基于三电平SVPWM调制策略的中点电位平衡控制算法,最后通过实验验证了能馈给定判据及中点电位平衡算法的有效性。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
控制与信息技术(2021年3期)2021-07-22
铁道机车车辆(2021年3期)2021-07-12
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年22期)2016-04-12
电测与仪表(2016年12期)2016-04-11
新高考·高一物理(2016年1期)2016-03-05
中国现代医学杂志(2015年26期)2015-12-23
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09