基于光干涉和拉力传感器的金属丝杨氏模量测量系统的设计
2021-12-30 11:07孙二平李英杰苗永平王学水
大学物理实验 2021年6期
孙二平,李英杰,苗永平,王学水
(山东科技大学 电子信息工程学院,山东 青岛 266590)
杨氏弹性模量(简称杨氏模量)是描述固体抗形变能力的重要物理量,只与材料的性质有关,反映了材料弹性形变与内应力的关系,是工程技术中机械构件材料选择的重要参数之一[1,2]。杨氏模量测量的方法主要分为两种方法:动态法和静态法。动态法主要包括声速法和共振法,静态法主要包括梁弯曲法和拉伸法[3]。其中拉伸法测量金属丝的弹性模量是经典大学物理实验,是各大理工科院校必做的大学物理实验之一。调研发现,拉伸法测量杨氏模量实验过程存在一系列的问题,如占地面积大,操作不方便,精确度低等[4-6]。
迈克尔逊干涉仪是一种分振幅双光束干涉仪器,可用于观察光的等厚、等倾干涉,测量光波波长,薄膜厚度以及折射率等,是大学物理实验中必不可少的实验仪器[1]。基于光的干涉原理,干涉仪两反射镜间的微小光程差的改变,可反映由于光干涉导致的强度变化,因而干涉仪还可用于微小位移的测量[7-9]。
本文基于光干涉和拉力传感器测量金属丝的杨氏模量,利用迈克尔逊干涉仪测量金属丝长度微变量,同时利用拉力传感器精确测量金属丝上的拉力,通过自主设计的拉力测量装置测量并显示出来。
该实验装置利用光干涉法和拉力传感器测量金属丝杨氏模量,有效地提高了杨氏模量测量精度。同时将迈克尔逊测量波长实验和杨氏模量测量实验结合起来,有助于提高学生思考能力,更全面的掌握知识。
1 测量原理
设粗细均匀的金属丝长度为l,横截面直径为d,在轴向拉力为F的作用下伸长Δl,根据胡克定律,在弹性限度内,应变与应力成正比关系,即
(1)
其中E为金属的杨氏模量。实验中测出金属丝的伸长量Δl,以及对应的拉力F即可得出金属丝的杨氏模量
(2)
从(2)式得,要想准确地测量杨氏模量,关键在于测量Δl这一微小形变量。
Δl的测量通过迈克逊干涉仪完成。测量原理如图1所示,转动微调或粗调手轮时,移动反射镜M1,从而拉伸金属丝,M1移动的距离,即是金属丝的微变量Δl。根据光干涉法求得金属丝的长度微变量Δl
(3)
其中ΔN为条纹改变的个数,λ为入射激光的波长。
同时通过测力计记录拉力F,即可求得金属丝的杨氏模量。
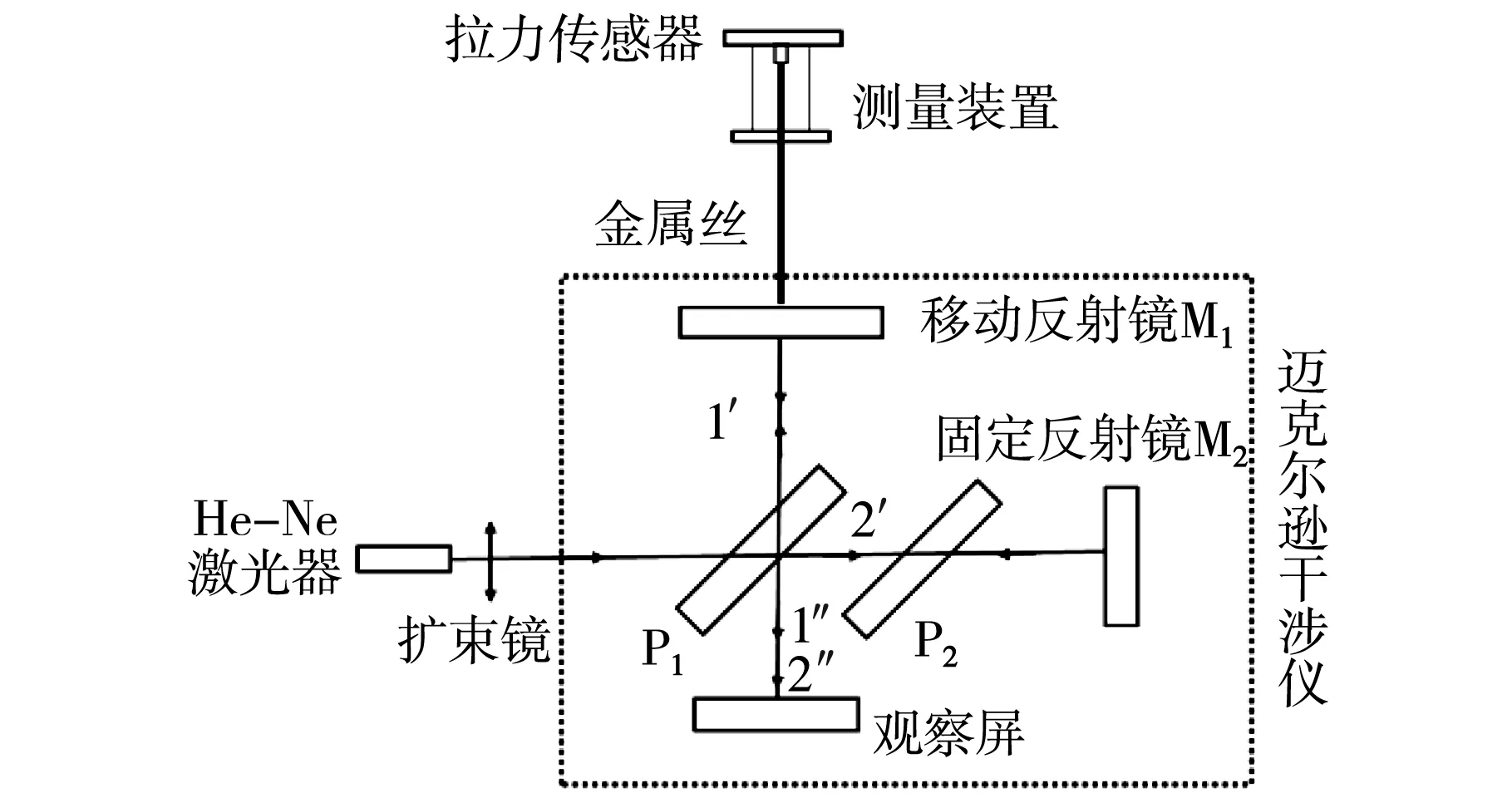
图1 测量系统原理图
2 实验装置的设计
该干涉测量系统,包括迈克尔逊干涉仪、He-Ne激光器、拉力传感器、拉力测量装置和待测金属丝。装置设置如图2所示:拉力传感器固定在迈克尔逊干涉仪移动反射镜端,金属丝将迈克尔逊干涉仪的移动反射镜与拉力传感器相连,拉力测量装置固定在拉力传感器下方。接下来详细介绍该测量系统的设计。
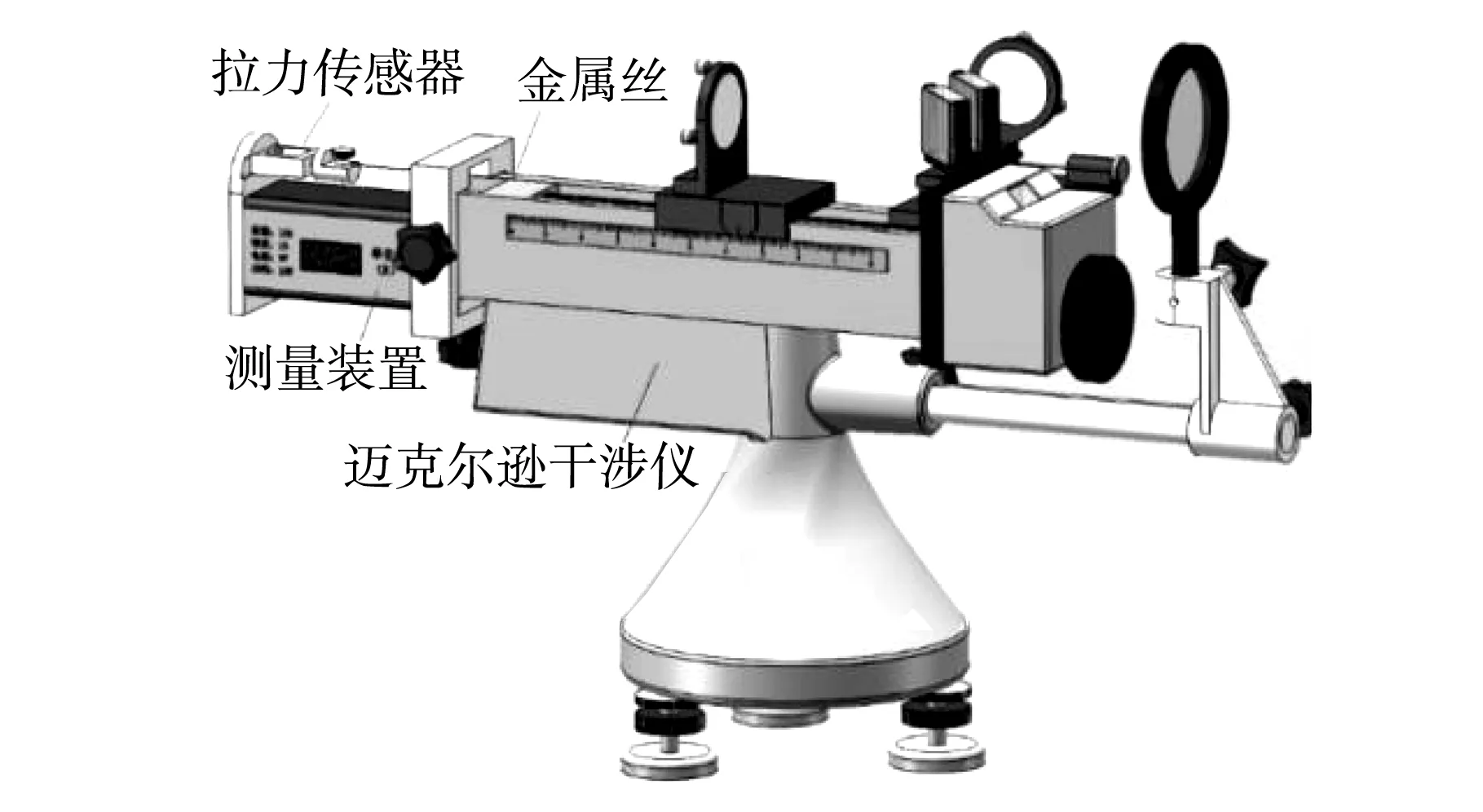
图2 测量系统装置图
2.1 光源
实验装置所选激光器为He-Ne激光器,输出波长632.8 nm,管长0.3 m,功率1.5 mV。He-Ne激光器安装方便、抗干扰能力强且稳定性较高,能够满足干涉测量系统的要求。
2.2 迈克尔逊干涉仪
迈克尔逊干涉仪选择实验室现有实验仪。
2.3 金属丝的选择
通过对实验室30台迈克尔逊干涉仪器进行测试,得到迈克尔逊干涉仪内部传动系统的丝杠机构[7]所能承受的最大拉力为5 N左右,又因结构限制,金属丝的长度也是固定值,在干涉仪允许的拉力F的前提下,能选择的铜丝相对其他金属丝直径范围较大,故在实验中多选择铜丝进行实验。
2.4 拉力传感器
拉力传感器(如图3所示)量程为0~10 N,精度0.01 N,灵敏度1 mV/V,工作电压5 V,满量程时输出为5 mV。拉力传感器的梁上钻有两个螺纹孔,通过其中一个将拉力传感器固定在拉力测量装置上,另一个螺纹孔与金属丝固定平台相配合。系统工作时,将金属丝的一端置于固定平台上,用螺钉的端面压紧金属丝,转动微调手轮,使反射镜发生细微移动,金属丝被拉长,拉力传感器输出微小电压量。
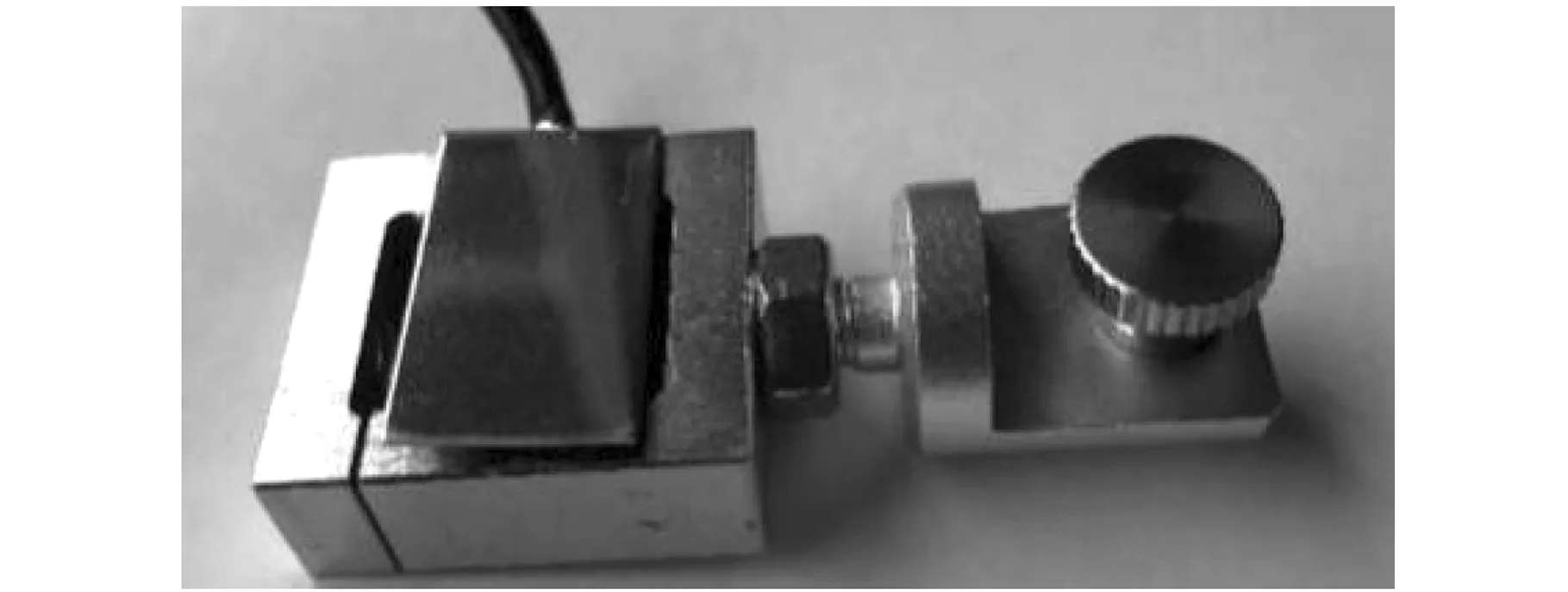
图3 拉力传感器和金属丝固定平台
2.5 拉力测量装置
拉力测量装置主要由测力计和装置外壳组成,核心部件为测力计。
2.5.1 安装
测力计(如图4所示)通过装置外壳安装在迈克尔逊干涉仪导轨尾部,其上放置拉力传感器并固定,且严格保证与压力传感器相连的金属丝和导轨平行。测力计和拉力传感器共同决定金属丝长度,在金属丝直径一定的前提下,其长度越短,每次实验的ΔF越大,微调滑丝得越快,但是金属丝太长又会导致实验仪器过长,因此设计测量装置时需要兼顾考虑。

图4 测力计
2.5.2 测力计硬件设计
测力计的功能主要是完成拉力的测量和显示,主要由电源模块、放大模块、MCU及显示单元组成。其电路框图如图5所示

图5 测力计电路框图
1)电源模块
整个测量装置用AC/DC电源适配器供电,适配器输入电压100~240 V、50/60 Hz,输出为9 V DC 0.6A。通过图6所示三种电路分别提供+5 V(图6 a),+3.3 V(图6 b),-3.3 V(图6 c)的电压给压力传感器,单片机(MCU)和集成运放芯片。
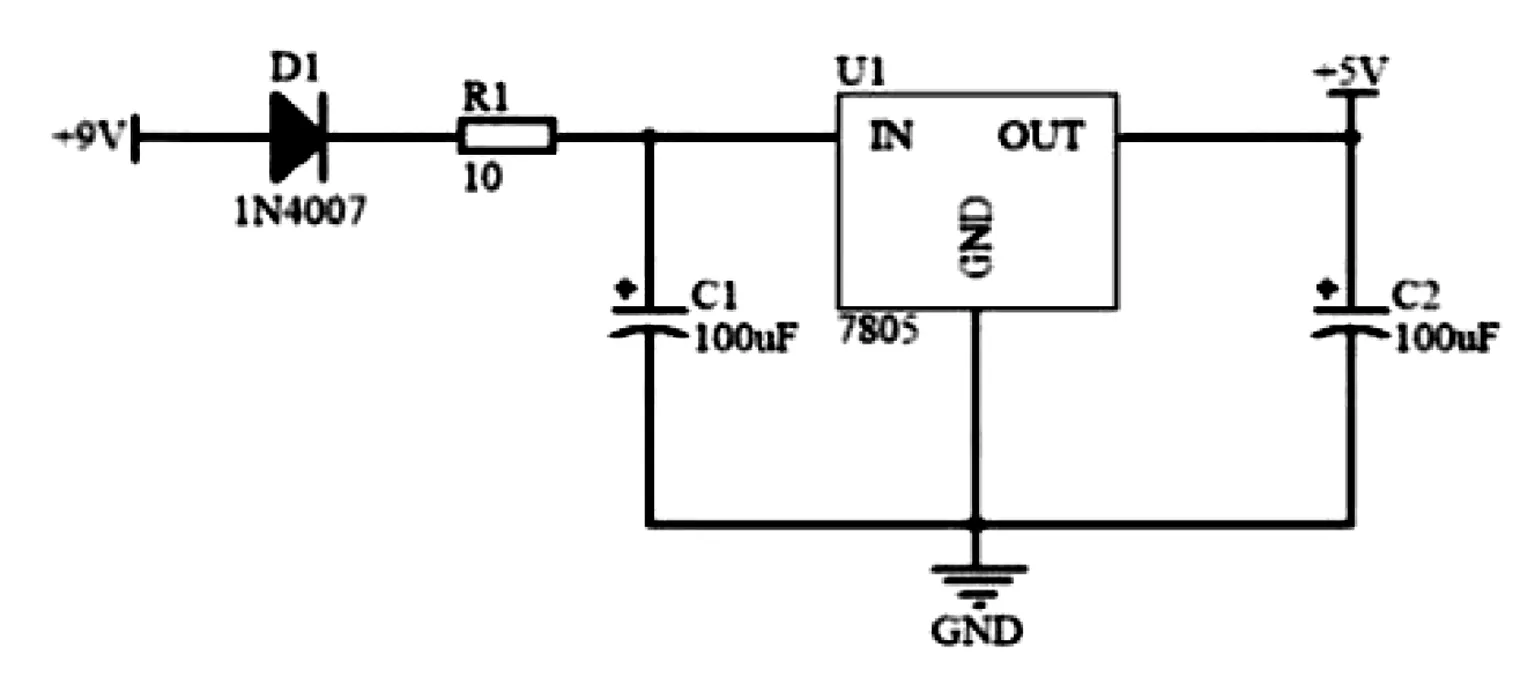
(a)
2)放大模块
放大模块采用差分放大电路,OP07芯片作为运算放大器,将压力传感器信号(0~5 Mv)放大500倍达到0~2.5 V。其放大原理电路图如图7所示

图7 放大电路
通过电路图得到差分放大器信号输入与输出之间的关系为:
(3)
当R1=R3且R2=R4时,有
(4)
将各电阻阻值带入,求出放大倍数为500倍,放大后的电压为0~2.5 V。
3)主控电路
主控电路是整个硬件电路的中心,其核心功能是协调各功能模块正常运行。主控芯片采用STM32F4系列的STM32F407ZGT6单片机芯片,其外围电路如图8所示。从放大模块输出的电信号经单片机内部A/D转换为数字电压信号,然后通过算法转换为显示单元数码管的驱动信号。
系统效应原理对企业标准化实践活动具有指导意义。在建立企业标准体系时,应明确体系建设的目标,制定与实现目标相关的标准并处理好标准之间的协调配套,保证标准系统成为一个有机整体,产生系统效应,达到预定目标。

图8 MCU电路
4)显示单元
显示单元选用SM420391R数码管,其硬件电路如图9所示。数码管由单片机输出的信号驱动,显示金属丝中的拉力值。
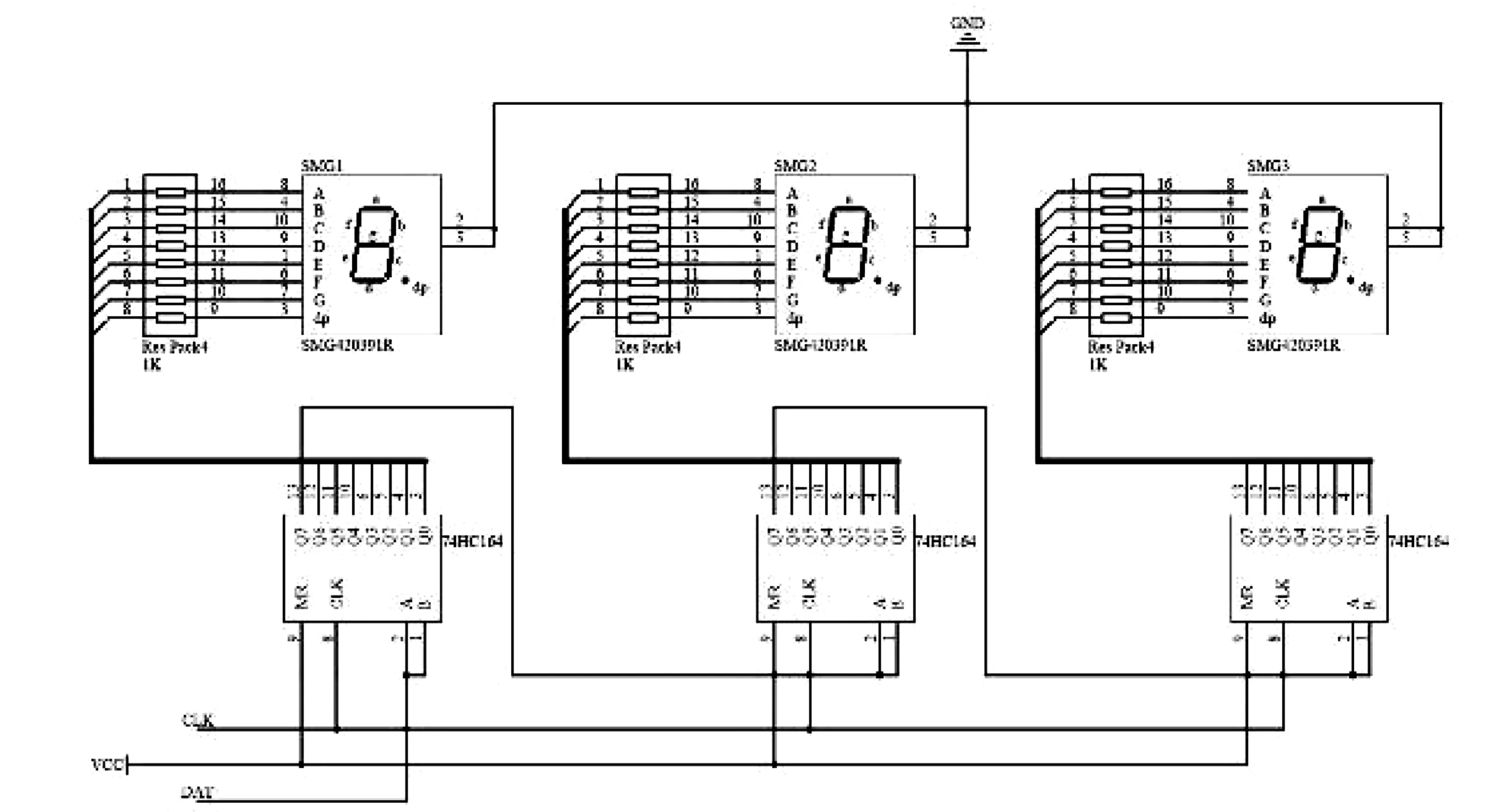
图9 显示单元电路
2.5.3 测力计软件设计
软件部分要实现的功能是处理数据并显示拉力,主要包含主程序和AD转换程序。编程时的集成开发软件是Keil ARM,程序的编程语言是C语言。
主程序中首先进行初始化操作,包括对ADC和系统定时器进行初始化。之后进入主循环,主循环中对模拟电压信号进行10次AD采样,将转换完成的数据通过冒泡法进行排序,去掉最大值和最小值后对剩余的8个数据求平均值,得到一个数字电压数据,通过参数计算转换后由三位数码管显示拉力F。
程序读取A/D转换数据采用查询方式,程序图如图10所示。考虑到学生记录数据的方便,设定1 s内显示两次拉力,设置ADC采样周期为480个ADC_CLK,单次A/D转换时间为23.62 μs,10次A/D转换时间为0.23 ms。
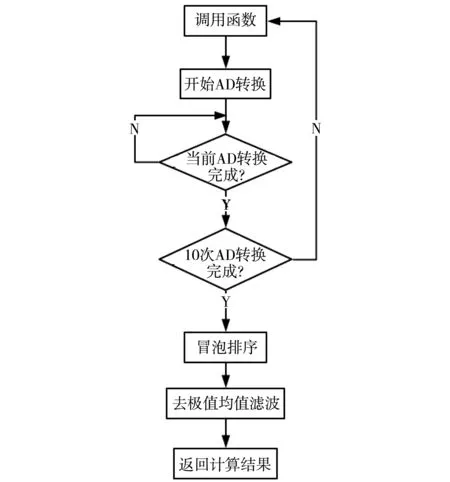
图10 AD转换程序框图
3 实验数据的测量
为了对比,实验同时采用该测量系统和传统方法-拉伸法对相同测试样品进行测量。
拉伸法实验中直接测量物理量为金属丝长度L、直径d、镜尺距离D、光杠杆常数b和长度微变量a(即标尺读数)。测量温度为20 ℃。所得数据如表1和表2所示。
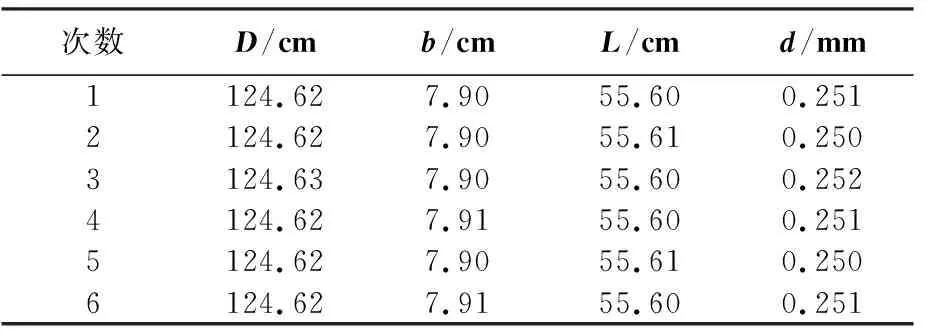
表1 拉伸法D、b、L和d的测量

表2 拉伸法铜丝微变量的测量
根据所测量数据得到杨氏模量的大小为
Y=(1.20±0.05)×102GPa
对应的不确定度大小为
E(Y)=3.87%
采用该测量系统,测试条件:He-Ne激光器波长为632.8nm,温度为20.0 ℃。实验中直接测量量为拉力F,干涉圆环改变的条数ΔN,金属丝长度L,金属丝直径d。

表3 该测量系统F、ΔN、L和d的测量
根据所测量数据得到杨氏模量的大小为
Y=(1.17±0.03)×102GPa
对应的不确定度大小为
E(Y)=2.36%
利用该测量系统测量铜丝的杨氏模量,在铜丝的标准值范围之内,说明该测量系统实际可行。利用该系统测量杨氏模量,各个测量量之间的相对不确定度相差较小,其中长度微小变化量Δl的相对不确定度最大为2%,相较于拉伸法Δl的相对不确定度3.75%,实验准确度有了显著提高(如图11所示)。该测量系统需要测量的物理量较少,进而有效地减少了测量误差。

图11 各物理量的不确定度(a ,b)
4 结 语
本文详细介绍了一种基于光干涉和拉力传感器的金属丝杨氏模量的测量系统。系统主要由迈克尔逊干涉仪,He-Ne激光器,拉力传感器,自主设计的拉力计,待测金属丝组成。该系统和传统拉伸法测量金属丝杨氏模量的系统相比,具有以下优点(1)占用空间小;(2)操作方便,一人即可完成;(3)待测物理量少,降低测量误差,提高精确度;(4)拉力的采集自动化;(5)多方面考查学生的实验能力和数据处理能力。该测量系统在第十一届山东省物理科技创新大赛中获得一等奖,并且已经在本校大学物理实验课程中应用,教学效果良好。该系统在满足大学物理实验教学的基础上,其设计原理和方案具有更广泛的推广价值和应用前景。
猜你喜欢
电线电缆(2022年6期)2022-12-23
九江学院学报(自然科学版)(2022年2期)2022-07-02
内江科技(2022年5期)2022-06-07
计测技术(2020年6期)2020-06-09
小天使·四年级语数英综合(2019年10期)2019-11-09
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
物理实验(2017年2期)2017-03-21
厦门大学学报(自然科学版)(2015年2期)2015-10-13
固体火箭技术(2015年1期)2015-04-25