多AUV温跃层观测方法研究
2021-12-30 15:24:50曾俊宝李树江
海洋技术学报 2021年5期
王 琳 ,曾俊宝 ,李树江,李 良
(1.沈阳工业大学,辽宁 沈阳 110870;2.中国科学院沈阳自动化研究所机器人学国际家重点实验室,辽宁 沈阳 110016;3.中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110169;4.辽宁省水下机器人重点实验室,辽宁 沈阳 110169)
海洋是地球上最大的水体,是我们人类赖以生存的第二疆土,其中,物理和生物现象对海洋的生态环境以及全球气候有巨大影响。温跃层是指海水中温度在垂直方向上出现突变或不连续变化的水层[1-2]。在温跃层中,其上下层海水物理性质不同。这种跃变或不均匀的变化会引发其他海洋特性也发生跃变或者不均匀变化,如声速的跃变、生物化学特性的跃变、鱼群的巡游水层分布等,因此会对海洋渔业、水下通信、海军潜艇活动等产生重大影响[3-4]。传统的海洋观测主要利用浮标、潜标和船舶走航等方式进行,这些传统方式存在限制范围、自主性差、实时性差等缺点。随着科技水平的不断发展,自主水下机器人(Autonomous Underwater Vehicle,AUV)越来越多地被应用于海洋特征观测,AUV无论是在观测范围,还是在观测精度上较传统方式都有了质的飞跃。如葡萄牙波尔图大学(University of Porto)利用MARES型号AUV[5-7],采用垂直梯度法对温跃层进行观测。美国麻省理工学院(Massachusetts Institute of Technology,MIT)采用AUV在无人监控的情况下,获取海洋温跃层四维信息(空间+时间)。蒙特利湾海洋研究所(Monterey Bay Aquarium Research Institute,MBARI)利用AUV,采用最大梯度值方法,能够在复杂海况下获取标准温跃层垂直剖面分布图。中国科学院沈阳自动化研究所田宇[8]提出了一种热液羽流仿真模型,并且基于该模型,研发了一个AUV追踪热液羽流仿真研究环境对其所研究的算法提供了支持,康小东[9]采用多AUV编队控制进行热液羽流跟踪,并利用仿真平台进行了验证。
对于单个AUV探测温跃层的边界,传统方法有七点二次平滑算法、最优分割法、平均梯度法等。七点二次平滑算法[2]根据最小二乘法得到七点二次平滑公式,主要解决了由不等距微分法和垂直梯度法所获取的要素垂直梯度结构可能发生的震荡,导致的跃层上、下界位置选取不够准确的问题。最优分割法[10]主要是对温跃层典型剖面以及几类特殊剖面的温跃层边界进行计算,进而优化了垂直梯度法在计算深海与浅海过渡区中跃层发生不连续性问题。并且,李凤岐等[11]证明了该算法,即通过求两次最优二分割的方法求得最优三分割。平均梯度法[12]采用的是计算整个AUV探测到的垂直水层温度的平均温度梯度,以此为阈值,根据温度梯度是否大于这个阈值,来判断是否在温跃层内。但这种方法适用范围局限,只适合温跃层分布均匀的海域。本文将采用垂直梯度法判别温跃层的边界,此方法较为简单易实现。
随着多AUV集群技术的发展,多AUV协同海洋特征观测的优势越来越明显。相较于单个AUV,多AUV具有高度的空间和时间并行性,能够有效扩展水下任务的时空覆盖范围,通过多机交叠覆盖作用,可以补偿单个水下机器人获取数据的不确定性和测量范围的局限性。当单个AUV在执行任务时,自身需携带多种设备,具备多种功能,造成体积大,控制复杂,会出现错误,从而导致效率低、观测效果不理想,所以依赖于多AUV间的信息共享,可构建更为强大的数据知识库,增强对环境的感知能力,实现单个AUV无法完成或难以完成的复杂任务。本文将针对多AUV温跃层观测这一研究背景,开展协同探测方法研究,并按以下顺序进行展开:第一部分描述了温跃层的特征,并采用拟合曲线来描述这一特征;第二部分简要介绍了本文采用的AUV,由于不同的AUV所采用的驱动方式不同,所以在探测方法上也有所区别;第三部分对单个AUV温跃层跟踪进行了研究,介绍了所采用的方法及探测试验结果;第四部分对多AUV温跃层探测方法进行研究,介绍了探测方案、实现方法及探测结果。
1 温跃层特征描述
温跃层在不同海域形式也各不相同,分为多种形式,但我们一直以来所研究的温跃层都是在我国近海区域,主要是在渤海、黄海、东海以及南海。这些区域的温跃层有着季风性变化,冬季风气候时期的温跃层较夏季风气候稳定,是观测温跃层形成的良好时期。根据温度在垂直面上的结构特点,可将温跃层分为以下几类:标准温跃层、双温跃层或多温跃层、暖中间层和冷中间层、逆温跃层[13]。在海洋中,温跃层一般以标准温跃层(单一温跃层)的形式存在。温跃层的主要特征值包括跃层强度、上界深度和厚度。温跃层上界深度主要指自海表面向下,温度梯度大于0.05℃/m(水深大于200 m)或0.2℃/m(水深小于200 m)所在的深度[14]。跃层强度主要指上下界取2个拐点,拐点的斜率就是温跃层强度,上下边界的深度差就是温跃层的厚度。图1为3条线段构成的简化温跃层曲线,图中两个拐点对应的上下边界即为所表示温跃层的上下边界,上下边界之间的深度即为温跃层的厚度,两拐点之间的线段斜率表示温跃层的强度。为了对温跃层进行精确描述,本文通过对多个温跃层数据分析,用式(1)所示的数学模型拟合了温跃层温度曲线,结果如图2所示。

图1 温跃层简化图
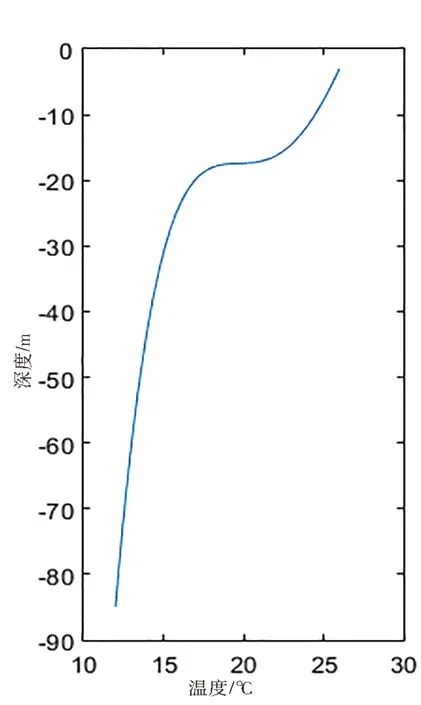
图2 拟合的温跃层曲线

式中,x代表深度(m);y代表温度(℃)。
2 “探索100”AUV
由于不同的AUV所采用的通信、控制及驱动方式不同,所以探测方法也有所区别,本节主要介绍论文涉及的“探索100”AUV,如图3所示。

图3 “探索100”AUV
“探索100”AUV是针对海洋生物、化学、物理等多种要素的高时空分辨率、立体组网观测需求,在“十二五”国家“863计划”和“十三五”国家重点研发计划支持下,成功研制的便携式自主水下机器人。经过多次试验,“探索100”AUV已成功应用于冷水团入侵、岬角涡旋及海洋声场环境测量,并通过水下组网通信,多台“探索100”AUV实现了自主编队,协同搜索等演示验证。
“探索100”AUV采用鱼雷状流线型外形,如图4所示,从前往后依次由无线通信模块、导航观测模块、声学通信模块、控制能源模块和艉部推进模块组成。从图中可以看出,“探索100”AUV艉部采用主推+舵翼的推进方式,属于欠驱动的AUV,所以在探测策略上需要考虑它的驱动能力,同时“探索100”AUV在导航观测模块部分安装了高精度的温盐深传感器,可以对海洋环境进行感知,尤其是温跃层的温度和深度特征。

图4 “探索100”AUV组成
为了实现组网协同探测,“探索100”AUV在其艏部安装了可以水下组网通信的水声通信机,并设计了一种用于水声网络的协议栈。该协议栈采用星形结构,各网络层之间的信息传递都通过核心模块进行转发,所以该协议栈可支持同层多种协议同时工作,以支持在单个节点上运行的各种应用程序,同时提供了一种跨层通信的统一方法。AUV通过通信“感知”周围的其他AUV,以使多AUV能够以集群的方式运行,如图5所示。

图5 多AUV节点分布和通信示意图
3 单个AUV跟踪温跃层
首先确定水体厚度Z,对其进行分层;接着将传感器采集到的温度数据进行处理,每一个水层上的温度用一个数值代表;然后基于垂直梯度判别法确定温跃层上下边界;最后根据上下边界,AUV进行YO-YO运动(周期性运动),跟踪温跃层。
3.1 确定水体分层厚度
由于水体中存在噪声,若对整个水体进行温度数据采集不具有代表性,所以将水体进行分层,分别对每一层的水体温度进行采集优化,而水体分层厚度Z的选取很重要。在孙龙飞等[15]的基于自适应阈值的自主水下机器人温跃层探测方法研究中,经过处理场外试验数据,得出不同Z值对计算的温度梯度有很大差别的结论。如果Z小,则采样点较少,噪声影响大;如果Z大,则曲线过于平滑,无法看出温跃层边界峰值点,不能很好地确定温跃层的边界。需要利用AUV的载体运动速度v,YO-YO运动上浮下潜角θ,传感器CTD的采样频率来fCTD确定分层厚度Z,公式如下[15]。

式中,N代表采样点个数;n代表最低采样点数,设最低采样点数为16个,AUV进行YO-YO运动的上浮和下潜角不大于60°。设AUV的载体速度v=2 m/s,传感器CTD的采样频率fCTD=16 Hz,计算得到Z=1 m。
3.2 温跃层温度数据处理
由于同一深度的温度值不同,故采取温度均匀指数法进行温度数据处理。首先对水体分层后的上下层边界处进行温度数据采集,分别采集8个点,然后取其平均值。

式中,Tup代表薄暖水层的上边界温度;Tdown代表薄暖水层的下边界温度,将AUV刚进入的水层称为薄暖水层。
最后求出整个水层的平均值。
式中,Tshallow代表薄暖水层的温度值,同理,求出厚冷水层的温度值。
3.3 判断温跃层上下边界
本文将采用垂直梯度法进行判别温跃层的上下边界,因为每一个水层中温度用一个数值代表,所以先求出两个相邻水层之间的温度差值,再求出温度梯度。

式中,Tm+1为m+1的水层温度;Tm为m的水层温度;T则为相邻水层的温度差值;TGrad为温度梯度。
判断温度梯度值与规定的阈值大小,根据下式判断AUV确定是否在温跃层内。

式中,Tred为阈值,Tred的取值为0.05 °C/m(水深大于200m)。若上式成立,则AUV可能处于温跃层内。
3.4 外场试验结果与分析
根据3.1—3.3节所述的方法对外场试验进行设计,试验步骤如下。
AUV按照预编程的深度先进行一次最大深度的YO-YO运动,第二次进行YO-YO运动时,当TGrad≥Tred时,则计数器Count= 1;重复YO-YO进行运动,如果TGrad≥Tred,则计数器Count++=2否 则Count=0;当Count=3时,则 认 为AUV探测到温跃层的上边界并开始进入温跃层;同理当AUV在温跃层里且TGrad≥Tred时,Count= 1;重复YO-YO运动,如果TGrad≥Tred,则计数器Count++=2;当Count=3时,则认为AUV探测到温跃层的下边界并驶出温跃层。AUV在上下边界内持续做YO-YO运动,直到预定时间结束后,完成温跃层探测任务,返航至母船附近。
2019年12月,在千岛湖按照上述步骤进行了单AUV跟踪温跃层试验,其温度与深度在场外的试验数据绘制如图6所示。
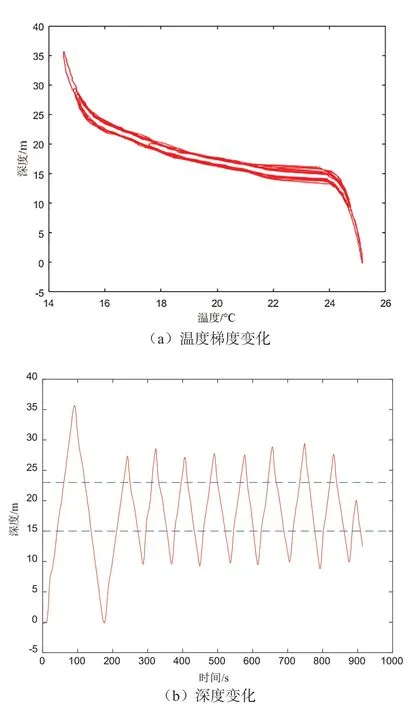
图6 单AUV跟踪温跃层
由图6(a)可知,深度在15~23 m时,温度变化大,是温跃层区域;而由图6(b)可以看出,AUV能 在10~25 m深度范围内进行YO-YO运动,很好地跟踪了温跃层的上下边界,达到了单台AUV跟踪温跃层的效果(由于AUV在运动航行时存在惯性,深度控制存在滞后性,所以跟踪范围较大,图中虚线部分为实际温跃层的范围)。
4 多AUV协同跟踪温跃层
由于单个AUV进行跟踪温跃层,无法实现实时跟踪的效果,会对温跃层的跟踪出现差异,所以引入多AUV协同跟踪温跃层。针对温跃层的特点,本文采用3台“探索100”AUV编队执行温跃层观测任务,其中一台AUV作为领航者在垂直面上做大范围的YO-YO运动,并对采集的温度信息进行处理后,将温跃层上边界和下边界信息,以及自身的航行位置信息通过水声传递给另外两台AUV,由它们在保持与领航者一定队形的前提下,分别执行对上下边界的跟踪,如图7所示。图中,1#AUV为领航者,2#AUV与3#AUV为跟随者。

图7 多AUV节点分布和通信示意图
4.1 编队方法
多AUV协同跟踪温跃层主要编队的方式不同,目前,实现多AUV系统编队航行的控制方法主要包括基于领航者—跟随者的方法、基于虚拟结构的方法、基于人工势能的方法、基于行为的方法、基于路径跟随的方法和基于信息一致性的方法等。本文将采用基于领航者—跟随者法去协同探测温跃层,这个方法相较于其他方法其编队控制结构简单,易于实现。
采用领航者—跟随者法,领航者和跟随者分别按照预编程的路径进行运动,领导者通过水声通讯周期性广播将自身的位置、姿态告知跟随者,跟随者根据与领航者设定的目标航向(θ)和目标距离(d),计算出自己的虚拟目标点(A),改变自身速度并通过跟踪虚拟目标点来保持整体队形控制,流程图见图8。跟随者与虚拟目标点位置关系如图9所示。

图8 小AUV编队控制流程图

图9 跟随者与虚拟目标点位置关系
L′跟随者与领航者的实时距离,L为跟随者与领航者的期望距离,d1为跟随者与虚拟目标点的容许误差距离,d2为跟随者与虚拟目标点的最大误差距离,d′为跟随者与虚拟目标点的实际距离,θ为跟随者与虚拟目标点的夹角。
若跟随者1运动时距虚拟目标点(A)的距离d′大于规划的距离d2且运动时领导者与跟随者1之间的距离L′大于规划的距离L,跟随者1处于滞后状态,则跟随者1需要超级加速到达虚拟目标点(A);若跟随者1运动时距虚拟目标点(A)的距离d′在d1与d2之间且运动时领导者与跟随者1之间的距离L′大于规划的距离L,跟随者1处于落后状态,则跟随者1需要加速到达虚拟目标点(A);若跟随者1运动时距虚拟目标点(A)的距离d′在d1范围内,跟随者1处于正常状态,则跟随者1只需要恒速行驶即可;同理,跟随者1处于超前或激进状态则需要加速或超级加速[16]。领导者与跟随者的运动策略如表1所示。
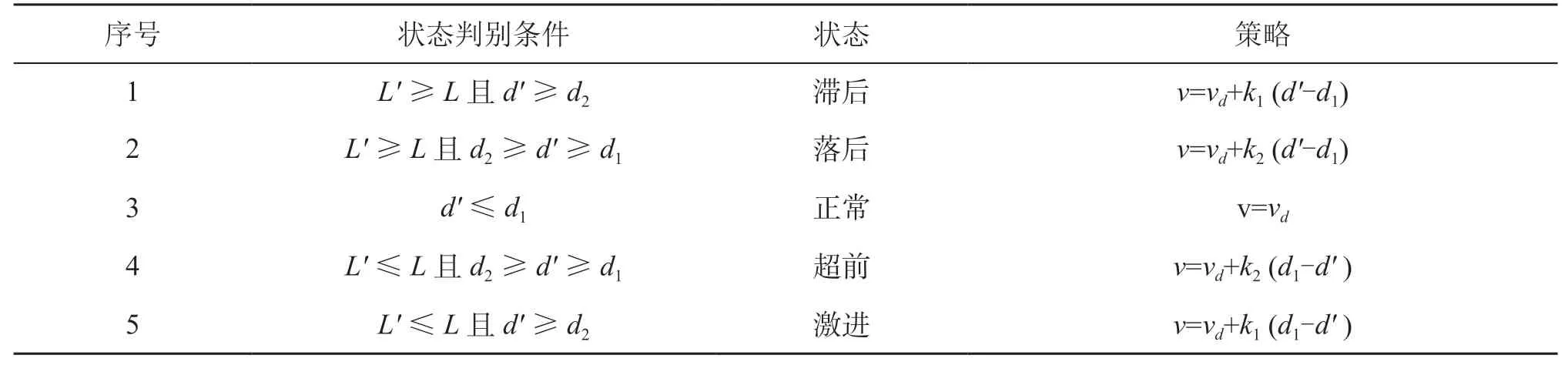
表1 跟随者状态判别
4.2 湖上试验
3台AUV从母船处逐个放出,各AUV先自主航行至各自初始点,并围绕着各自的初始点在水下盘旋圆周运动,等待统一的触发时间,然后开始编队协同跟踪试验,试验结果如图10所示。图中1#AUV为领航者,进行YO-YO运动,将通过势函数得到的温度信息进行梯度解算,得到温跃层上下边界,分别为11 m和27 m,并将该信息以及自身位置发送给2#AUV和3#AUV,令其执行上下边界跟踪使命。

图10 场外试验结果图
图10(a)即为温跃层的曲线图,在斜率大的范围内为温跃层的区域,图10(b)为多AUV协同跟踪温跃层,红色为领航者1#AUV运动轨迹,蓝色和绿色分别为2#AUV和3#AUV的运动轨迹,结合单AUV跟踪温跃层的运动轨迹(图6(b))可知,多AUV中各自AUV的探测范围相比单AUV更大,获得信息更多,能一直实时跟踪温跃层,充分体现多AUV协同探测的优势。
5 结 论
本文主要介绍了采用中国科学院沈阳自动化研究所研制的“探索100”AUV跟踪海洋中的温跃层现象。阐述了温跃层的主要特征,并提出了一种垂直下降法AUV温跃层的跟踪算法,该算法利用垂直方向上的梯度来确定温跃层的上下边界,可以实现对温跃层的实时观测。针对单AUV探测温跃层的不足,引入了多AUV协同自主探测,采用了领航者—跟随者的编队方法,领航者AUV通过水声通信将信息传递给跟随者AUV,实现实时跟踪。最后,通过湖上试验验证了多AUV协同探测温跃层的可行性,能同时跟踪到温跃层,提高了AUV跟踪温跃层效率,实现了实时跟踪,取得了更好的观测效果。
猜你喜欢
智慧少年(2022年8期)2022-05-30 10:48:04
中国海洋大学学报(自然科学版)(2021年1期)2021-12-02 05:41:26
今日农业(2021年5期)2021-05-22 01:32:50
智能城市(2018年8期)2018-07-06 01:11:00
海洋学报(2017年12期)2017-11-29 03:08:19
中国广播(2017年9期)2017-09-30 21:05:19
纺织科学研究(2017年8期)2017-09-05 09:46:54
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15 17:47:35
诗潮(2017年5期)2017-06-01 11:29:51
海洋科学进展(2016年3期)2016-08-12 06:45:12