
基于光纤光栅的机器人脚腕部力传感器
2021-12-30 05:17张书文刘泽华张锦龙
仪表技术与传感器 2021年12期
侯 猛,张书文,刘泽华,张锦龙
(河南大学物理与电子学院,河南开封 475001)
0 引言
力传感器是机器人控制系统中最重要的组成部分之一,尤其是机器人关节处,安装于机器人脚腕部时可实现机器人重心倾向感知和平衡状态监测等功能,对机器人受力分析和保持稳定起着不可替代的作用。传统的力学传感器主要有电阻式传感器、电容式传感器等[1],具有高精度、高灵敏度等特点,广泛应用于各种力学传感领域。但是,传统的电阻式传感器和电容式传感器易受电磁干扰,且易腐蚀、易受高温高压影响,无法在恶劣的环境中正常使用[2]。
随着光纤光栅传感技术的发展,光纤光栅被广泛地应用于应力、温度等传感领域。与电阻式或电容式传感器相比,光纤光栅体积小,且具有抗电磁干扰、耐高温、耐腐蚀等优点,能在复杂环境中使用[3]。采用波分复用和时分复用的方法能在同一根光纤上串连多个光栅,实现大规模阵列化传感,大幅减少了传感器的信号引线数量。由于其独特的性能,国内外学者对光纤光栅传感技术展开了一系列的研究。孙世政等将2根光纤光栅粘贴于十字梁上,设计了一款二维力传感器,实现了受力杆件在水平方向的受力检测,但是没有给出标定坐标系下传感器受力的角度[4];GUO等提出了一种分离式弹性结构体,将6根FBG粘贴于梁内外表面,实现了多维力传感,但由于FBG粘贴部位变形过小,不易检测[5];蒋奇等设计了一种Y型梁光纤光栅多维力传感器,但此传感器由于形变小、受浮动梁影响等原因,存在灵敏度低、维间耦合较大等问题[6]。可见,光纤光栅多维力传感还有很大的发展空间。
针对以上问题,提出一种用于机器人脚腕部的光纤光栅多维力传感器。建立了传感器的模型,并用有限元分析与实验结合的方法,实现了机器人脚腕部的多维力测量,对机器人保持平衡及重心监测具有重要意义。
1 基本原理
1.1 FBG传感基本原理
FBG传感原理是以光波为载体,光纤为传输介质,利用光纤的光敏特性在紫外光的照射下改变FBG周期和折射率,使光纤光栅中心波长发生漂移,从而实现传感,其中心反射波长可表示为[7]
λB=2neffΛ
(1)
式中:λB为光纤光栅初始中心波长;neff为光纤纤芯的有效折射率;Λ为光栅的周期。
当宽带光经过光纤光栅时,特定波长的光信号将会被反射回去。当光纤光栅受到轴向应变和温度作用时,该反射信号波峰将发生漂移。光纤光栅中心波长漂移量与其所受温度和轴向应变影响的关系为[8]
Δλ=(αf+ξ)λΔT+(1-Pe)λΔε
(2)
式中:λ为光纤Bragg光栅的初始中心波长;Δλ为中心波长漂移量;ΔT为光栅所受环境温度变化量;Δε为光栅轴向形变;αf为光纤的热膨胀系数;ξ为光纤热光系数;Pe为光纤弹光系数,与光纤材料有关[9]。
1.2 传感器设计
根据机器人脚腕受力监测的应用需求,设计了如图1所示的传感器并建立了坐标系,该传感器由底座、承力管、十字环及4个对称分布的悬臂梁组成,设计尺寸如表1所示。
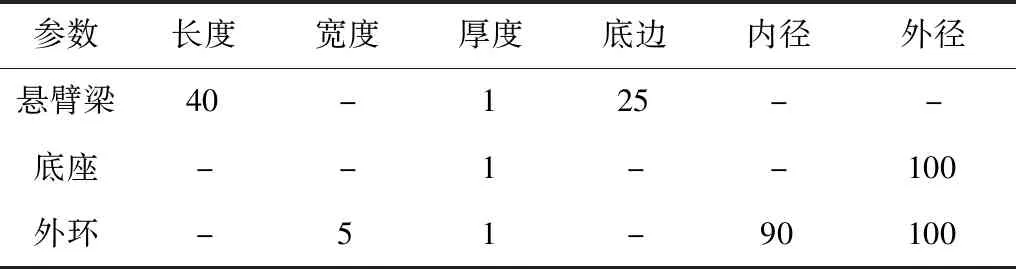
表1 传感器尺寸参数 mm
对于等强度梁,如图2所示,在材料力学中,等强度梁自由端受力引起梁表面考察点处的轴向应变为[10]
(3)
式中:ε为考察点处悬臂梁的应变量;E为弹性模量;F为梁自由端受力;b为悬臂梁固定端长度;L、h分别为悬臂梁的长度与厚度。
在不考虑温度影响的情况下,由式(2)、式(3)可得FBG中心波长变化量Δλ与悬臂梁自由端所受外力F之间的数学关系式:
(4)
由于式(4)中的参量除了F以外都是定值,可知光纤光栅中心波长漂移量与悬臂梁自由端受力成线性关系。
当传感器外环受到竖直向下的压力时,会使该位置相邻的两梁发生形变,使粘贴于其上的FBG因形变而中心波长发生漂移。因此,可以根据不同FBG中心波长漂移量得出机器人脚腕部位的受力情况。FBG在传感器上的分布情况如图1所示。
2 有限元分析
传感器所使用的材料为结构钢,模型使用SolidWorks建模完成,并且导入ANSYS软件中进行了力学仿真分析。坐标系如图1所示,以X轴为起点,按逆时针方向分别沿外环θ角为0°、15°、30°、45°、60°、75°、90°的位置处给传感器施加100 N竖直向下的力F,传感器应变云图如图3所示。由应变云图可知,当θ角为0°时,只有此梁发生形变,相邻两梁几乎无变化。当θ角不为0°时,只有该位置相邻的2个梁发生形变,其余各悬臂梁没有发生形变。
为了研究悬臂梁的轴向形变量与传感器受力位置的关系,给予传感器外环不同位置施加100 N竖直向下的力,悬臂梁的中轴线部位轴向形变如图4所示,其中θ是传感器外环受力位置与原点的连线和X轴的夹角。由图4可知,传感器外环受力位置离悬臂梁越远,悬臂梁形变越小。
由图4可知,距悬臂梁固定端5~25 mm处为均匀应变区。选取距悬臂梁固定端1 cm位置处作为考察点,在施加外力F大小不变的情况下,观测该位置的轴向形变量和θ角的关系。并将仿真得出的数据导入到Origin进行数据拟合,其结果如图5所示。结果显示:悬臂梁形变大小Δε与传感器受力位置与悬臂梁的夹角θ呈三角函数关系。最后,选取距悬臂梁固定端1 cm位置处作为光纤光栅的粘贴位置,并进行实验研究。
3 实验研究
3.1 传感器制备
传感器采用计算机控制激光切割加焊接的方法加工而成,实物如图6所示。由于FBG很细且易折断,因此必须对FBG进行保护。为了降低FBG的啁啾效应,粘贴前先将FBG拉紧,然后再用聚氨酯类粘合剂将FBG与传感器进行粘合固定,这种粘合剂能使FBG与金属粘贴更紧,从而提高传感器的灵敏度。最后外围再涂上环氧树脂AB胶,起到对光纤光栅有效保护的作用。实验平台主要包括光纤光栅多维力传感器、光栅波长解调仪,加载系统采用砝码加载,该方法操作简单、稳定。
3.2 实验过程
实验时传感器底座固定,以10 N为步长,给传感器外环不同位置沿竖直向下方向加力至100 N,测量各光纤光栅的中心波长漂移量。当传感器外环受到竖直向下的压力时,悬臂梁自由端受力发生形变,粘贴于其上的FBG也会因剪应力而发生轴向形变,中心波长也会发生漂移,可以根据FBG中心波长漂移量判断出传感器整体受力趋势。
实验一:为了分析传感器的灵敏度,并且验证FBG中心波长漂移量与外力F的关系。对传感器上4个悬臂梁自由端进行从0~100 N的加压实验,实验结果如图7所示。其中纵轴是FBG1~FBG4中心波长,横轴是悬臂梁自由端所受外力F。结果表明:光纤光栅中心波长漂移量与悬臂梁自由端受力F成线性关系,这与理论分析是一致的。
由图7可知,4根光纤光栅的中心波长漂移量与外力F的拟合曲线的拟合率分别为0.998 9、0.996 4、0.999 6、0.998 8,灵敏度为15.9 pm/N。可见,该传感器具有良好的线性输出特性和较高的灵敏度。
实验二:为了研究传感器上各悬臂梁测得的分力与传感器所受合力大小和位置的关系,给传感器外环不同位置施加100 N竖直向下的力,观测各FBG中心波长漂移量并记录。由于传感器上4个等强度梁参数相同且传感器外环受力时只有受力部位相邻两梁发生形变,因此只需采用位于X轴和Y轴正方向上的梁作为研究对象。如图1所示,以X轴正方向为起点,θ角分别为0°、15°、30°、45°、60°、75°、90°的位置对传感器施加大小为100 N的力进行实验。并将实验所得数据进行拟合,拟合结果如图8所示,其中纵坐标是FBG1与FBG2所测量的分力,横坐标是传感器外环受力位置与原点的连线和X轴的夹角θ。实验结果显示,当传感器所受外力F大小不变时,FBG1和FBG2测得的分力与传感器外环受力位置和悬臂梁之间的夹角θ成三角函数关系。
当传感器外环受力大小一定时,FBG1与FBG2所测量的分力F1、F2与传感器受到的外力F以及θ角三者之间的关系式近似为
(5)
式(5)就是传感器悬臂梁测得的分力与所受外力F的关系,重复实验二并将数据代入式(5)求出合力F,将所求合力与加载的外力相比,灵敏度误差约为1.05%,角度误差在2°内,证实了传感器的可靠性。式(5)中各项常数会根据传感器的材质和尺寸的不同而发生变化,在不同材质和尺寸的传感器中这些数据可以在实验中测得。
为了验证实验结果的普遍性,对传感器外环竖直向下依次施加以10 N为步长0~100 N的力重复实验二,实验结果显示,不同外力下传感器测得的分力与合力关系与式(5)基本一致。
4 结束语
本文根据光纤光栅应力传感原理,设计了用于机器人脚腕的应力传感器。使用ANSYS软件对传感器进行了力学仿真,分析了传感器的传感原理并确定了FBG的粘贴位置。搭建实验平台,完成了传感器的实验研究和数据分析。实验结果显示,传感器最大灵敏度为15.9 pm/N;灵敏度误差约为1.05%;角度误差在2°内。该传感器具有较高的灵敏度,并且抗电磁干扰、耐高温,能在复杂环境中使用。对机器人脚腕受力分析、调整重心、保持平衡具有重要意义。
猜你喜欢
石油沥青(2021年1期)2021-01-11
中医眼耳鼻喉杂志(2019年2期)2019-04-13
保健与生活(2017年3期)2017-03-23
恋爱婚姻家庭·养生版(2017年2期)2017-02-15
高师理科学刊(2016年8期)2016-06-15
大众文艺(2016年16期)2016-03-11
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
祝您健康(2015年7期)2015-07-29
焊接(2015年5期)2015-07-18
物理与工程(2014年4期)2014-02-27
