麦克纳姆轮底盘等百分比操纵特性优化
2021-12-30 11:33:24杨云杉孟春节
武汉工程大学学报 2021年6期
杨云杉,杨 红*,2,张 聪,孟春节,赵 帅
1.武汉工程大学机电工程学院,湖北 武汉430205;2.化工装备强化与本质安全湖北省重点实验室(武汉工程大学),湖北 武汉430205
在竞赛机器人和特殊工种机器人中,全向移动经常是一个必需的功能,而麦克纳姆轮(以下简称麦轮)作为一种典型的全向轮,在全向移动机器人底盘中应用最为广泛[1-2]。常用麦轮底盘具有线性操纵特性,即相对速度与相对控制量呈线性关系,当速度小时调节作用太强,易使系统产生振荡;速度大时调节作用又太弱,调节不够灵敏、及时。由于麦轮底盘在全向移动过程中存在较频繁的起步与急停,线性操纵特性不太适应于此种速度变化较快的场合。
等百分比特性是一种优化的调节特性,广泛应用于调节阀的流量控制中[3]。具有等百分比流量特性的调节阀,可实现相同的阀杆行程变化所引起的流量变化的相对值总是相等的,可使流量控制平稳缓和,具有很强的适应性[4-6]。在底盘操纵中,可借鉴调节阀的等百分比流量特性,并采用软件补偿的方法[7],在不改变原有电机系统的线性转速特性的基础上,使底盘系统具有等百分比操纵特性,以使控制过程平稳缓和,便于操控。
1 麦轮底盘控制原理
1.1 麦轮底盘运动学分析
麦轮底盘一般选取手持或车载遥控器的3个摇杆通道,来对应控制底盘的前后、左右平移和中心自转(以下简称x、y、z轴),并通过多通道的组合控制来实现其复合运动。
全向运动底盘通过四麦轮驱动结构来实现对小车的三自由度控制,可采用逆运动学模型通过4个轮子的速度,计算出底盘的运动状态[8-9]。以小底盘几何中心O点为原点建立坐标系xoy,设Vtx、Vty、ω为底盘沿x、y、z轴方向的速度,a、b为轮子轴心处到底盘几何中心的y轴、x轴方向水平距离。轮子沿轮轴方向的速度为ni,其中i=1,2,3,4,分别代表右上轮、左上轮、左下轮、右下轮。麦轮底盘的逆运动学关系式为:
1.2 底盘系统控制流程
由于麦轮底盘的全向移动需要依靠各个机轮产生的分力矢量最终合成为任一要求方向上的合力矢量,因此需要精确地控制各个轮子转动的速度。伺服电机转子转速能受控快速反应,并采用PID闭环控制消除误差,提高控制精度,在基于麦轮底盘的机器人研发中被广泛应用[10-11],麦轮底盘系统速度控制流程如图1所示。
速度控制流程中,期望速度获取和底盘速度分解环节由软件模块完成。由式(1)可知底盘速度分解与合成是线性过程,同时电机系统的闭环控制方式使得电机输出转速n逼近于期望转速ns,故底盘实际速度v与期望速度vs呈线性关系(如图中虚线框部分),而底盘速度v与操纵控制量l间的关系取决于底盘期望速度与输入控制量之间的映射关系。在麦轮底盘硬件系统线性特性的基础上,不同的期望速度获取规律,可得到不同的底盘系统操纵特性。
2 麦轮底盘操纵特性
底盘操纵特性可定义为底盘移动的相对速度与相对控制量(摇杆的相对偏移)之间的关系,表示为:
引入参数R,定义为:

R称为可调比,是能够调控的底盘最大速度与最小速度之比。
2.1 线性操纵特性
线性操纵特性是底盘系统中最常见的特性,即底盘移动的相对速度与摇杆的相对偏移量呈线性关系,此时摇杆的单位偏移所引起的底盘速度变化为常数,如式(4)所示:式中,K为常数,即底盘操纵系统的放大系数。
预防:(1)预防最有效的办法是接种猪瘟疫苗。在该病的常发地区或受威胁地区,按疫苗标注说明,每头份用灭菌生理盐水1 ml稀释后皮下或肌肉注射一头份,种母猪于配种前或配种后免疫一次;仔猪于20~25日龄首免,50~60日龄二免。在非疫区,对种母猪于配种前或配种后免疫一次;种公猪于春秋两季各免疫一次;仔猪断奶后免疫一次。另外,可以对仔猪进行超前免疫。(2)开展免疫监测。(3)坚持自繁自养,全进全出的饲养管理制度。(4)及时淘汰隐性感染者带毒种猪。(5)做好场舍的消毒杀虫和卫生工作,减少猪瘟病毒的侵入。

当l=0时v=vmin,l=lmax时v=vmax。代入上述边界条件积分推导可得:

同理得出底盘实际速度与期望速度的线性关系式为:
式中vsmax为底盘期望速度最大值。
2.2 等百分比操纵特性
麦轮底盘的等百分比操纵特性,是指底盘移动的相对速度与摇杆的相对偏移量呈对数关系,如式(7)所示。

代入边界条件变换得:

此时摇杆的单位偏移所引起的底盘相对速度变化与此点的相对速度成正比,即系统放大系数随底盘速度的增加而增加,可使速度小时调节平稳,速度大时调节灵敏,利于底盘系统控制[12]。
2.3 线性特性到等百分比特性的补偿函数
通过外加控制系统对期望速度的获取进行修正,可使底盘系统的固有操纵特性修正得到期望的操纵特性,操纵特性的补偿原理如图2所示。
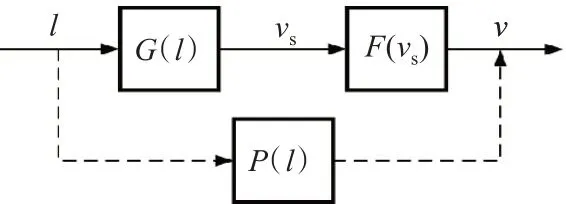
图2 操纵特性补偿原理Fig.2 Compensation principle of handling characteristic
图2中:G(l)为补偿函数;F(vs)为麦轮底盘系统固有的线性特性函数;P(l)为期望的等百分比操纵特性函数。
联立底盘的固有特性函数和期望的操纵特性函数:

解得补偿函数为:

3 等百分比特性算法设计
3.1 底盘期望速度最大值计算
麦轮底盘在x、y、z轴方向的速度最大值由底盘的设计要求和电机性能决定,因此可由几何关系求得底盘在任意方向的速度最大值。某一瞬时摇杆偏移量与速度关系如图3所示,其中l为摇杆偏移量,lx、ly为l在x、y轴方向上的分量,vsmax为该摇杆偏移上的底盘最大速度,vxmax、vymax为底盘在x、y轴方向上的最大速度。

图3 摇杆偏移量与速度关系图Fig.3 Rocker offset and velocity diagram
图中θ表示摇杆偏移l与x轴夹角,故此摇杆偏移量方向上的底盘平移速度最大值可由几何关系求得:

其中secθ可由图3瞬时摇杆偏移状态下lx、ly的值来求得:
故可求出摇杆任意偏移位置时的平移期望速度最大值。
3.2 速度等百分比计算
由图3所示,l=lx·secθ、lmax=lxmax·secθ,该瞬时摇杆相对偏移量可化简为x轴方向的摇杆相对偏移量,由式(12)可得期望速度vs:
由几何关系可分解为x、y轴方向的期望速度:
同理可由任意方向的平移速度分解求得底盘在x、y轴方向的期望速度。
对于z轴方向的期望速度,则带入z轴方向速度极值vzmax可得:

上述x、y、z轴方向的底盘期望速度带入式(1)可求解出各麦轮电机期望转速。
3.3 可调比设定
可调比R也被称为可调范围[13-14],是能够反应转速特性的参数,可根据系统控制要求和实际测试效果来设定,不同的R下补偿函数仿真曲线如图4所示。
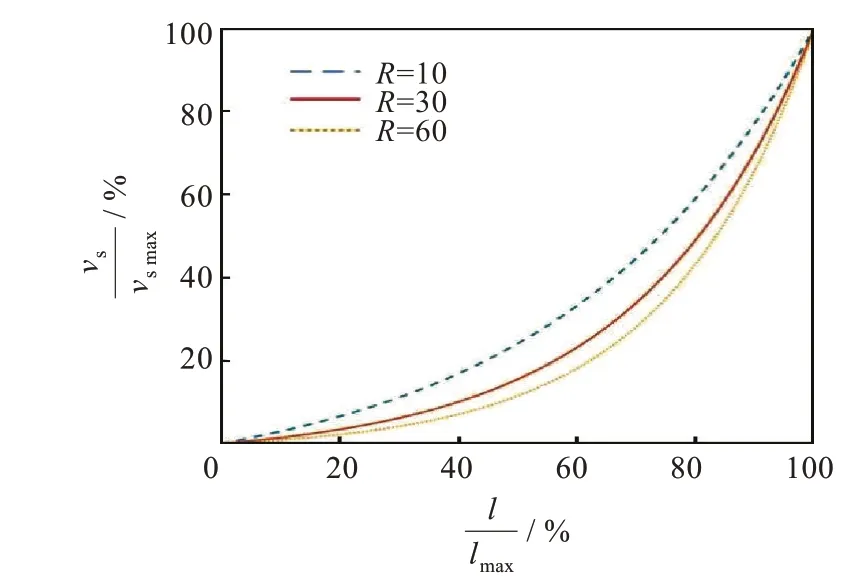
图4 不同R下的补偿函数曲线Fig.4 Compensation function curves under different adjustable ratios R
由图4可知,当R过大时,曲线曲度过大,前期底盘起步时速度变化缓慢,后期高速行驶时速度变化过快。当R过小时,曲线更近似于线性曲线,等百分比特性不明显。R值设定适当,可使底盘在保证良好等百分比特性的同时,操纵灵敏且速度变化快慢适中。
4 算法测试及改进
4.1 测试及分析
系统测试对象为Robmaster机甲大师赛的某工程车,其麦轮底盘的控制基于SΤM 32单片机系统和双摇杆遥控器,各机轮由伺服电机驱动,如图5所示。该车车身较高、负载较大,常规线性操纵时,全向移动产生的急开急停容易导致车身震荡甚至倾覆,因而对操纵特性进行优化。

图5 系统测试平台Fig.5 System test platform
在底盘实际运行中通过SΤM 32CubeMonitor软件进行实时变量检测,以其中某个电机期望转速和实际转速随摇杆偏移量的变化来反应底盘速度的变化特性,实时采样得到曲线图6(a)。由图可知,当手动控制摇杆朝某一通道方向以固定的速度偏移时,通道值随时间线性上升,电机期望转速和实际转速呈现指数形式上升,符合等百分比操纵特性。
4.2 补偿算法改进
由图6(a)可知,当摇杆产生初始偏移,底盘起步阶段,实际转速相对于期望转速有一定滞后,这是由于阻尼作用和底盘负载的存在导致的系统惯性滞后,即电机有一段启动死区,影响底盘操纵的启动响应[15]。由于底盘速度与电机转速n存在解算关系,在算法改进过程中可采用底盘速度的启动补偿来消除电机启动死区,故对式(10)做出如下改进:


图6 测试平台操纵特性曲线:(a)等百分比,(b)启动死区补偿Fig.6 Τest platform handling characteristic curves:(a)equal percentage,(b)compensation of dead zone
式中,ϕ为底盘的启动死区。如此可保证摇杆初始偏移时就有一定的期望转速,可避开电机转速启动死区,使实际转速能紧跟摇杆偏移量变化。改进后电机实时变量检测的放大效果如图6(b)所示,底盘系统启步响应特性显著改善。
5 结 论
基于软件补偿的方法,可在不改变底盘及电机硬件系统固有特性的条件下,改善底盘系统操纵特性。实际应用表明,改进后的补偿算法能为麦轮底盘的全向移动提供良好的等百分比操纵特性,兼顾了起步时的平稳缓和和行进中的灵敏有效,适应能力更强,结合伺服电机的闭环控制系统具有良好的动态性能和控制精度。通过合理设定系统的可调比R和启动死区ϕ,可在满足等百分比操纵特性的基础上使底盘的操纵更加灵敏有效,达到对麦轮底盘操纵特性优化的目的,有利于麦克纳姆轮全向移动底盘在各个领域的进一步推广应用。
猜你喜欢
电脑爱好者(2022年5期)2022-05-30 14:58:47
地理空间信息(2022年3期)2022-04-01 14:16:14
南方农机(2021年3期)2021-02-07 09:07:04
湖北农机化(2020年17期)2020-11-02 07:46:54
制造技术与机床(2017年7期)2018-01-19 02:29:53
测绘工程(2017年3期)2017-12-22 03:24:50
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:36:58
学习月刊(2016年19期)2016-07-11 01:59:38
专用汽车(2016年4期)2016-03-01 04:14:20
汽车维修与保养(2015年6期)2015-04-17 03:31:48