履带式翻粮机的结构设计
2021-12-29 10:01:12潘爱琼张志永
成组技术与生产现代化 2021年3期
潘爱琼, 张志永
(郑州科技学院 机械工程学院,河南 郑州 450064)
在以散装方式储藏粮食的高大平仓房或圆顶仓房里,粮食因储藏不当会经常出现霉变、结块等现象。据统计,全世界每年因储藏不当而产生的粮食浪费占粮食总产量的8%。翻粮机是一种新型粮食仓储翻仓设备,可在一定范围内上下翻倒粮食,增强粮堆的通风状态,提高粮层的疏松度和通透性,减小粮堆上下层的潮湿程度和温差,消除粮堆内的起热点,大大增强储粮的稳定性[1]。
我国现有翻粮机一般由转向扶手、电机直联斜齿轮减速机、船式锥体、排粮口和舵板自动控制器等构成,在翻粮过程中需要人工推动把手转向,属于半自动化设备。以翻粮机在平粮面上3.0 m/min、在扒沟粮面上 V形沟内2.59 m/min的行走速度为例,一栋长宽规格为20 m×60 m的粮仓需要6~7 h不间断工作,才可以完成粮面翻倒作业,与纯人工粮面扒沟方式相比,工作效率虽大大提高,但仍需要扶翻粮机把手的工人长时间工作。在这种环境下的长时间工作人员容易吸入较多粉尘,且在较大翻仓深度时扶把转向的劳动强度较大。本文基于Solidworks设计一款便捷的履带式翻粮机,通过对其传动机构、行走机构、翻粮机构的优化设计,达到自动翻粮的目的。
1 传动机构设计
翻粮机需要在粮仓内行走,工作环境复杂,容易受到灰尘、粮食和瞬时过载等因素的影响。在翻粮机的传动机构设计时,可采用链传动将动力传递给驱动轮的方式。链传动能够减少打滑,保持准确的传动比,传动效率高、径向压力小、机器结构紧凑,且在高温、潮湿等恶劣环境下能够很好地工作,具有较高的稳定性和可靠性。翻粮机的传动机构如图1所示。

1.轴承座;2.链轮;3.驱动轴;4.滚子链;5.行走电机;6.行走电机;7.滚子链;8.离合器;9.驱动轴;10.链轮图1 翻粮机的传动机构
行走电机5和6通过滚子链4和7传动,分别将动力传递到两个链轮2和10上。链轮通过键固定在两根驱动轴3和9上,由驱动轴带动驱动轮。当电磁离合器8闭合时,两根驱动轴会同时转动,避免了翻粮机在前进或后退时的偏转、倾倒;当电磁离合器断开时,两驱动轴分离,只要合理控制两个行走电机的转速就可以实现翻粮机的自动平稳转弯。
2 履带式翻粮机行走机构设计
翻粮机常用的行走方式有多种,如:①依靠船式箱体的浮力和向后排粮的反作用力,推动翻粮机向前行走;②轮式行走方式;③履带式行走方式。与前两种行走方式相比,履带式行走方式在松软的粮面上支撑面积大、运动相对平稳[2]。履带式行走机构主要由驱动轮、张紧轮、承重轮、支撑轮和履带组成(图2)。
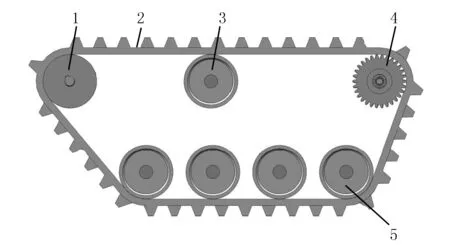
1.张紧轮;2.履带;3.支撑轮;4.驱动轮;5.承重轮图2 翻粮机的行走机构
翻粮机两侧的驱动轮、张紧轮、承重轮和支承轮安装在机架的底座上,橡胶履带环绕两侧各轮用以支撑翻粮机在粮面上行走。张紧轮轴末端与机架、加强板内的矩形孔形成滑动副。张紧轮轴的位置可以通过调节螺杆长度实现,从而调整履带的张紧度,防止履带在工作时的横向滑动和振跳。
翻粮机在粮仓内工作环境恶劣、行走的路况复杂;流动的粮食很容易进入履带和履带轮啮合区,被碾碎,且当粮食在啮合区累积到一定程度时,会挤压履带而导致履带变形或脱落,影响翻粮机正常行走。为了避免这种情况发生,本文设计一种密封装置,以避免粮粒进入啮合区。该密封装置的结构如图3所示。

1.履带;2.驱动轮;3.密封板;4.驱动轮轴;5.从动轮;6.从动轮轴;7. 密封板图3 密封装置的结构
在翻粮机两侧安装两个密封板,使啮合区形成一个密封区[3]。履带内表面有密封槽,密封板边缘与履带内密封槽契合,并通过安装孔固定在驱动轮轴和从动轮轴上。以剖面显示的履带内表面密封槽如图4所示。

图4 以剖面显示的履带内表面密封槽
3 翻粮机构设计
本文采用绞龙机构(图5)作为履带式翻粮机的翻粮机构。主要工作部件是螺旋叶片。根据形状不同,可将螺旋叶片分为实体型、叶片烈、带型和爪型等。由于实体型叶片具有速度快、输送力和输送量大、效率高等优点,适用于运送干的、不粘结的小颗粒物料和粉状物料,故本文采用的是实体型叶片。

图5 履带式翻粮机的绞龙机构
3.1 螺旋直径的计算
(1)
式中:K为特性参数,取0.049;Q为最大翻倒能力,取2 t/h;ψ为填充特性系数,取0.3;ρ为物料填充密度,在物料为玉米时取0.75 t/m3;ε为倾斜系数,取0.46。计算可得:D=0.215 4 m≈215 mm。查阅标准螺旋直径表(150 mm、200 mm、250 mm、300 mm、400 mm、500 mm、600 mm),应当取螺旋直径200 mm。
3.2 螺距的计算
粮食上下翻倒过程能否顺利进行,在很大程度上取决于螺距的设置[5]。当Q和D一定时,粮食运动过程的滑动平面随螺距的改变而改变,使粮食分布发生变化。螺距为:
S=K1D
(2)
式中,K1为比例系数,主要受粮食在料槽里的运动取向、运动速度、物料尺寸、湿度,以及叶片的材料、表面状态等因数的影响。当绞龙机构(及螺杆)水平放置时,K1=0.8~1.0;当螺杆与水平方向呈一定角度布置或输送物料的流动性较差时,K1≤0.8[6]。
本文设计的履带式翻粮机绞龙机构是竖直放置的。根据设计要求,取K1=0.6。将其代入式(2),可得:S=120 mm。
4 履带式翻粮机的总体结构
本文设计的履带式翻粮机主要完成下列3个动作:自动行走、转弯、粮食的上下翻倒。其总体结构如图6所示(为清晰展示其内部结构,隐藏了密封结构、顶盖结构)。
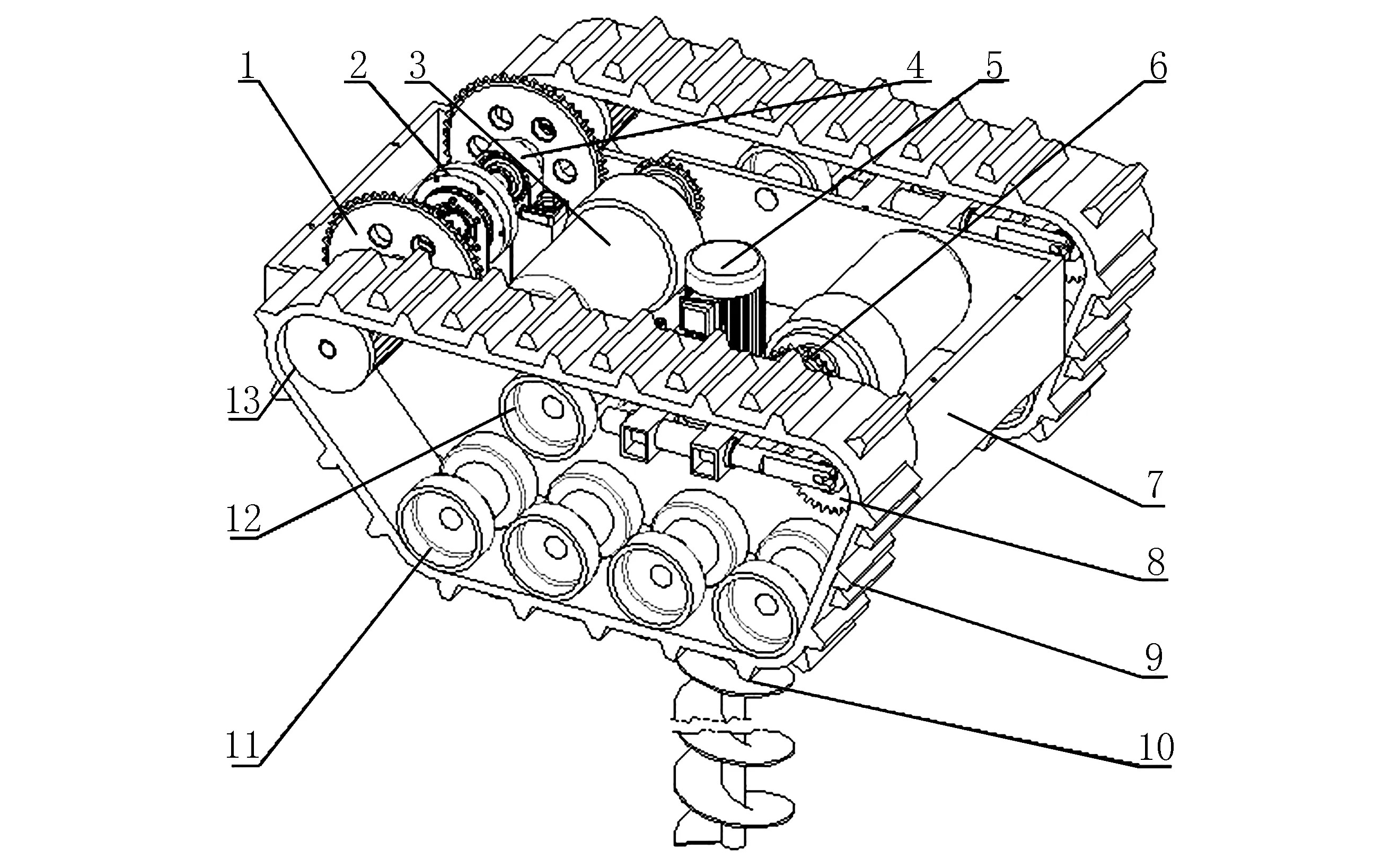
1.大链轮;2.离合器;3.行走电机;4.轴承座;5.翻粮电机;6.小链轮;7.底座;8.张紧轮;9.履带;10.绞龙机构;11.支撑轮;12.导向轮;13.驱动轮图6 履带式翻粮机的总体结构
行走电机3运行,带动驱动轮转动,履带机构行走,再通过离合器的开合来控制两个行走电机的动作,实现翻粮机在粮面上的直行或者转弯运动。翻粮电机5带动绞龙10旋转,可实现粮食的上下翻倒,最终实现自动行走同时翻粮的目的。
5 结束语
为了提高仓储单位大规模翻粮的效率,降低工人的作业强度,本文基于Solidworks三维建模软件设计了一种履带式翻粮机。它主要包括传动机构、行走机构、翻粮机构,可实现自动翻粮的目的,具有一定的应用价值。
该翻粮机的传动机构采用链传动方式,在两驱动轴之间安装电磁离合器,使翻粮机不仅可以直线行走,还可以自动平稳转弯;采用履带式行走机构,并设计了密封机构,使翻粮机主体形成密封区,避免了粮粒进入啮合区;翻粮机构采用绞龙机构,其螺旋直径取200 mm,螺距取120 mm。
猜你喜欢
中国农机化学报(2023年9期)2023-10-09 12:41:42
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
科学与信息化(2021年22期)2021-09-02 06:43:02
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
橡塑技术与装备(2021年6期)2021-03-19 08:11:08
装备制造技术(2020年9期)2021-01-26 00:15:08
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
中国新技术新产品(2020年4期)2020-05-05 15:49:48