
临近空间太阳能无人机横航向变质心控制技术
2021-12-28 10:47王克帆邱潇颀高长生荆武兴
空天防御 2021年4期
王克帆,邱潇颀,高长生,荆武兴
(哈尔滨工业大学航天工程系,黑龙江哈尔滨 150001)
0 引 言
近年来,随着太阳能电池技术的不断发展,临近空间太阳能无人机重新成为世界各国军事研究的热点。由于其具有飞行高度高、工作寿命长、覆盖范围广、使用成本低的特点,因此可以弥补飞机平台高度低、时间短以及卫星平台成本高、侦查密度低的缺点,是执行侦查预警、目标跟踪以及通信等任务的理想空中平台[1-2]。在空天防御领域,临近空间太阳能无人机兼具传统航空航天器的诸多优点,也被称为“高机动性伪卫星”,应用前景广阔。
当前太阳能无人机的横向控制常采用方向舵偏转和螺旋桨差动实现。例如,Meola 等[3]利用方向舵偏转实现了对小型无人机的控制,验证了方向舵控制方案的可行性;赵维娜等[4]基于变权伪逆法和变约束再分配伪逆法,研究了螺旋桨差动控制分配算法。考虑到能源约束的问题,太阳能无人机多采用大展弦比、低结构面密度的设计,以此来提升气动效率、降低结构重量[5]。但这会造成太阳能无人机的机翼扭转刚度不足,再加上其飞行高度较高导致来流密度较小,使得副翼操纵效率低下,甚至会出现“副翼反效”现象[6]。太阳能无人机的蓄电池密度较大、质量相对集中,且其质量通常占全机质量的30%~40%[7],因此,选用蓄电池作为可移动质量块的变质心能够获得足够的控制力矩[8-9]。
变质心控制技术已经在多个领域中得到了应用。Huang 等[10]基于PID 控制理论,利用变质心技术实现了对太阳帆卫星的高度控制;周革[11]将变质心技术应用于平流层飞艇的姿态控制,分析了飞艇控制能力与滑块质量、位移、移动速度之间的关系。Erturk 等[12-13]将变质心技术应用于固定翼无人机的控制,通过将双滑块放置于无人机的纵轴和横轴,实现了对无人机的稳定控制;此外,在火星探测器[14]、弹头再入[15]、水下航行器[16]等领域,变质心控制技术也有报道。
本文以临近空间目标预警探测为背景,以小型正常式布局太阳能无人机为对象,基于传统的倾斜转弯(bank to turn,BTT)控制,提出了以蓄电池为质量滑块、滑轨沿展向布置的太阳能无人机变质心控制方案,分析了采用此方案的无人机动态特性,并基于PID 控制理论设计了以滑块偏移量为控制量的横向控制器。
1 变质心太阳能无人机动力学特性
1.1 机体坐标系的定义
传统无人机机体坐标系原点定义于飞机质心处。但是对于本文研究的变质心无人机,其质心位置在不断变化。为了避免歧义,需要对本文定义的机体坐标系作出说明:机体坐标系原点位于不包括质量块的机体质心B 处,x轴沿体轴指向飞机头部,y轴垂直于飞机纵向对称面指向飞机右侧,z轴与x、y轴构成右手直角坐标,指向飞机腹部。
1.2 变质心太阳能无人机构型
本文研究的变质心太阳能无人机的基本构型如图1所示。
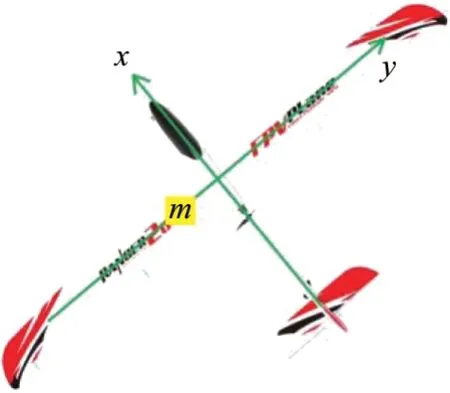
图1 变质心太阳能无人机基本构型Fig.1 Basic configuration of moving-mass solarpowered UAV
设飞机机体质量为mB,滑块质量为m,系统总质量为mS,有

质量比定义如下:

此外,机体质心B 在机体坐标系下位置为(0,0,0),设系统质心S在机体坐标系下位置为(xS,yS,zS),滑块质心位置在机体坐标系下为(x,y,z)。从而有

式中:RS、RB、r分别为机体坐标系下系统质心、机体质心、滑块质心的位置矢量。进一步有

即

1.3 无人机运动方程
1)运动学
经简单的坐标转换,可以得到无人机的运动学方程如下:

式中:pn、pe、pd表示无人机位置矢量在惯性坐标系三轴的分量;u、v、w和p、q、r分别表示飞行速度和转动角速度在机体坐标系三轴的分量;ϕ、θ、ψ分别代表滚转角、俯仰角和偏航角。
2)动力学
对于质心平动动力学,有如下关系:

式中:vS、vB、vK分别为系统质心、机体质心和滑块质心的绝对速度。设机体坐标系原点的绝对速度为vo,机体转动角速度为ω,由式(8)可导出:

对式(9)进行微分可得

式中:δ为相对速度微分符号;ω为系统的旋转角速度。
在机体坐标系下研究式(10),可得无人机质心平动动力学方程为
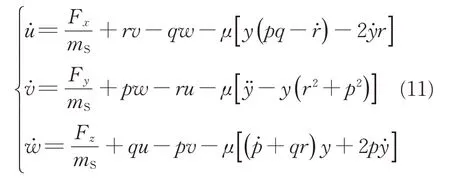
式中:Fx、Fy、Fz为无人机所受外力在机体坐标系各轴分量;y为滑块偏移量。
对于绕质心转动动力学,由动量矩定理有

式中:H为系统的动量矩;M为系统受到的合外力矩。
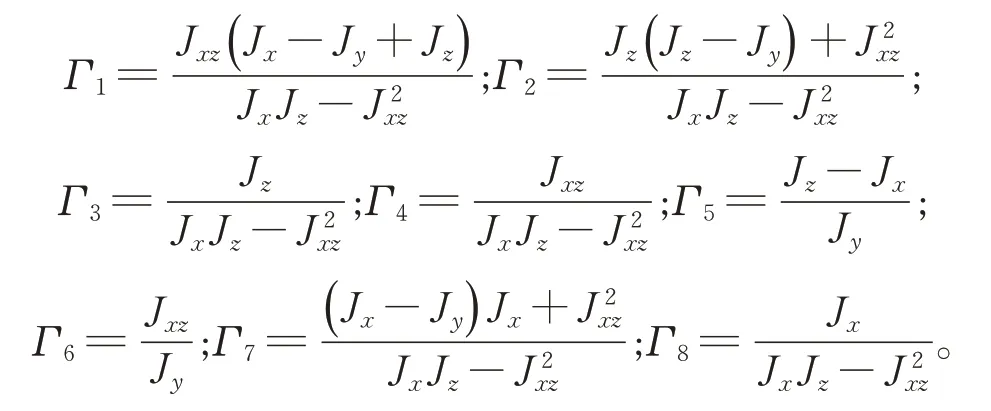
同样在机体坐标系下处理式(12),可得无人机转动动力学方程为
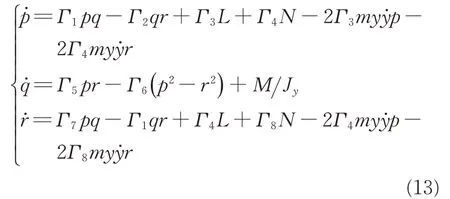
式中:L、M、N为所受外力矩在机体坐标系各轴分量;
用滑块替代副翼后,式(11)和式(13)中力和力矩的表达式为
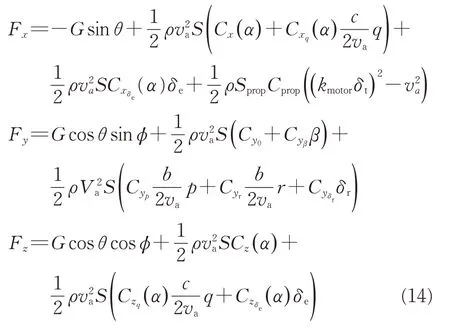
式中:G=mSg为系统总重量;ρ为大气密度;va为无人机空速;S为机翼参考面积;c为机翼平均气动弦长;α、β为攻角和侧滑角:δe、δr、δt分别为升降舵偏转角、方向舵偏转角和发动机油门大小;Sprop、Cprop是螺旋桨扫过的面积和效率系数;kmotor为与发动机自身属性相关的常数。

式中:b为机翼展长;kΩδt为发动机转动角速度;kT为实验确定的常数。
补充方程:

1.4 线性化模型
基于小扰动假设,在特征点处的横向运动线性化方程为

式中:状态向量x=[ΔβΔpΔrΔϕΔψ]T;控制输入为u=[ΔyΔδr]T;状态矩阵A和控制矩阵B的具体形式见式(18)~(19),式中各项参数的具体值见文献[17]。

2 变质心太阳能无人机横向控制系统设计
图2 展示了基于BTT 控制方案设计的变质心太阳能无人机横向控制系统基本结构,由滚转角控制器和偏航角控制器两部分组成。图中,Δψc表示期望偏航角;Δϕc表示期望滚转角。

图2 横向控制系统结构Fig.2 Lateral control system structure
2.1 滚转角控制器
由图2可知滚转角控制器是整个横向控制系统的内回路,因此要求其带宽足够大。同时,为了改善滚转阻尼特性,滚转角控制器选用“比例+微分(PD)”控制方案,利用可由陀螺仪测量得到的滚转角和滚转角速度作为反馈信号。

式中:Ly、Lp为式(18)和式(19)中的值。
可知滚转角控制器的输出为

2.2 偏航角控制器
由于滚转角控制回路采用PD 控制,为了得到无误差的横向控制系统,偏航角控制器选用“比例+积分(PI)”的控制形式,其结构如图4所示。由此可知偏航角控制器的输出为

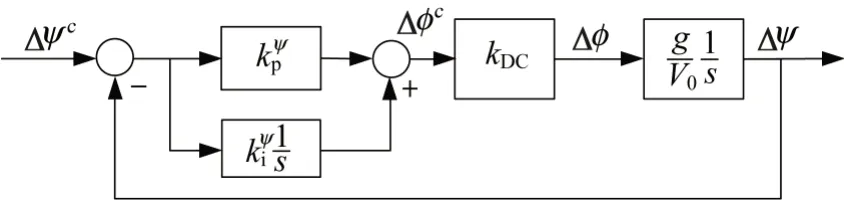
图4 偏航角控制器结构Fig.4 Yaw angle controller structure
在设计中,只要保证偏航角控制器的带宽小于滚转角控制器带宽的1 5,则滚转角控制器的数学模型就能用其稳态增益kDC来表示(kDC=1),进而可以忽略其动态。
2.3 参数表达式设计
将图3 所示滚转角控制器的闭环传递函数与式(23)所示标准二阶环节对比,可得滚转角控制器参数的表达式分别为式(24)和式(25)。

图3 滚转角控制器结构Fig.3 Roll angle controller structure

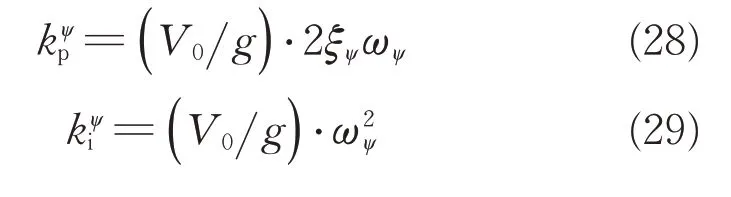
当kDC=1 时,图4 所示偏航角控制器的闭环传递函数为
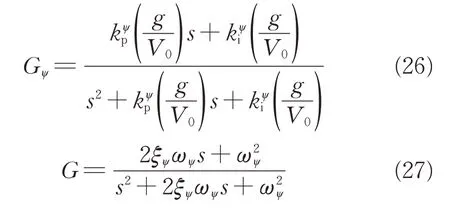
将式(26)与式(27)所示二阶传递函数对比可得偏航角控制器参数如式(28)和式(29)。
3 仿真分析
为降低太阳能无人机结构复杂性,在仿真中将方向舵偏转角Δδr设置为0,即仅以滑块偏移量Δy作为可控量。考虑到驱动滑块运动的舵机的延迟效应,可将其看作时间常数为0.2 s的惯性环节。此外,滑块的最大滑动速度设置为0.5 m/s,最大滑动行程设置为0.6 m。
无人机的基本几何参数如表1 所示。结合式(24)~(25),选取阻尼比为ξϕ=1.5,自然振荡角频率为ωϕ=πrad/s,可得其滚转角控制器参数。为了保证外回路带宽小于内回路带宽的1 5,选取ωψ=π6 rad/s,选取阻尼比为ξψ=1.2,结合式(28)~(29),可得其偏航角控制器参数,如表2所示。

表1 变质心太阳能无人机参数Tab.1 Parameters of moving-mass solar-powered UAV
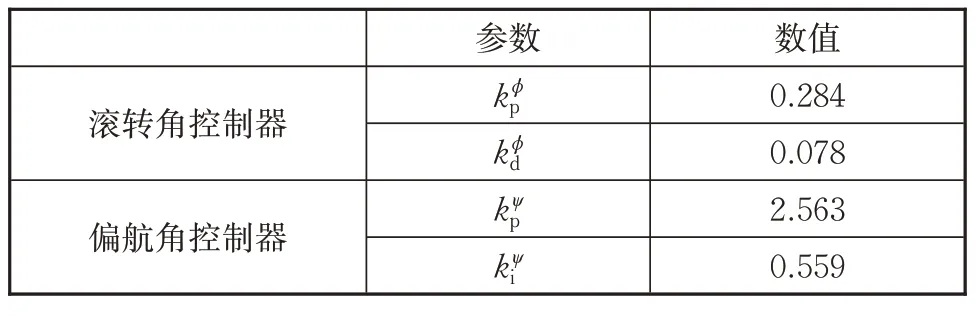
表2 控制器参数Tab.2 Parameters of controller
设置两个仿真条件:Con1为不做任何处理的理想状态;Con2 表示由于阵风的作用,在t=10 s 和t=50 s处滚转角存在标准差为5°的随机扰动。
3.1 被控特性分析
基于以上线性化结果,可求得滚转角与滑块偏移量之间的传递函数关系为
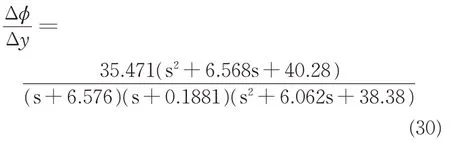
从而可见其极点分布如表3所示。

表3 极点分布Tab.3 Poles distribution
显然传递函数特征根实部均在左半复平面内,可知系统是稳定的,其中滚转模态衰减速度较快,而螺旋模态是一种慢衰减运动。
图5 反映了在滑块质量一定时,分别改变其滑动速度和最大行程时滚转角的响应曲线。由图5(a)可以看到不同滑动速度所产生的滚转角稳态值是相同的,其主要影响动态过程,即滑动速度越快,响应也越迅速,但速度增大到一定程度后,这种现象不再显著。值得注意的是,滑动速度的增加所引起的系统动态特性改变并不明显。而图5(b)反映出最大行程的改变会造成横向操纵能力发生较大范围的改变,显然滑块行程越大,操纵能力就越强。

图5 改变滑块移动速度和行程时的滚转角响应Fig.5 Response of roll angle for different sliding speeds and strokes
3.2 滚转角控制器
图6 展示了滚转角控制器在Con1 和Con2 条件下对滚转角指令的跟踪效果。由图6 可以看出:在理想状态下,滚转角控制器跟踪10°阶跃信号时的调节时间约为3 s,且过渡过程平滑无超调,但是由于采用的是PD 控制律,因此滚转角跟踪会存在一定的稳态误差;当存在阵风干扰导致滚转角出现偏移时,控制器在较短时间内(t<5 s)便消除了阵风的影响,使系统状态量维持在稳定值,具有较好的抗风性。
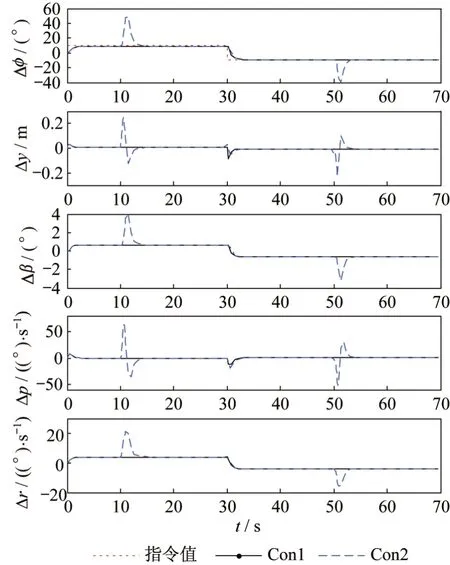
图6 滚转角控制器响应曲线Fig.6 Response curves of roll angle controller
3.3 偏航角控制器
图7 展示了偏航角控制器在Con1 和Con2 条件下对偏航角指令的跟踪效果。由图7 可知:在无阵风扰动情况下,控制器实现了对偏航角指令的无误差稳定跟踪。在偏航角指令产生-70°的阶跃变化时,控制器可以在10 s 内将系统镇定下来,过渡过程存在一定的超调量,超调量的大小与滑块的最大滑动速度和最大滑动距离有关;当存在阵风干扰时,以滚转角控制作为内回路的偏航角控制器同样具有良好的抗风性能,在10 s 之内便可消除阵风的影响,使系统状态稳定到指令值。
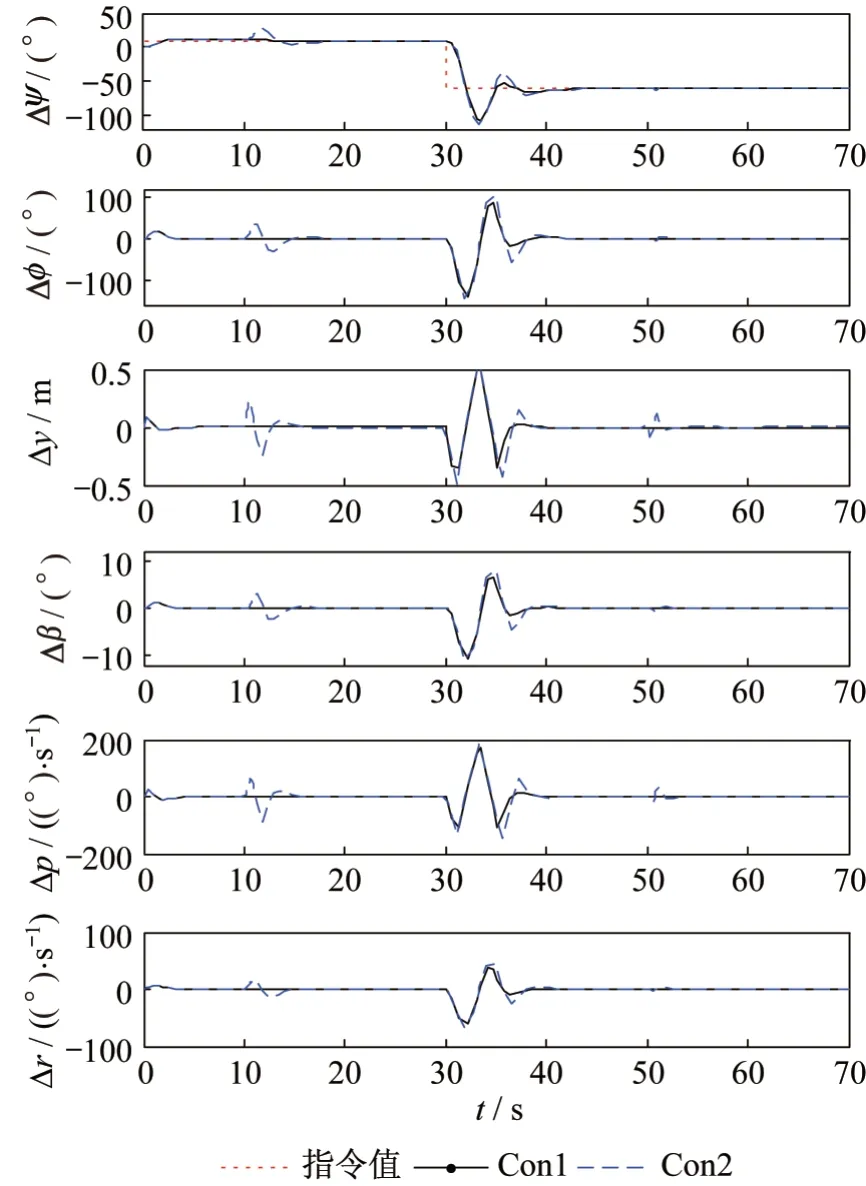
图7 偏航角控制器响应曲线Fig.7 Response curves of yaw angle controller
3.4 改变滑块最大滑动速度和行程时的系统特性
由于选用蓄电池作为质量滑块,因此滑块质量在太阳能无人机设计完成后是不可人为改变的,可改变的只有滑块最大滑动速度和行程。为方便表述,分别记为vmax和Lmax。下面分别研究改变vmax和Lmax时系统特性的变化。
图8 反映了当Lmax=0.6 m 时改变滑块最大滑动速度vmax所造成的偏航角响应特性的变化。图9 反映了当vmax=0.5 m/s 时,改变滑块最大滑动行程Lmax所引起的偏航角响应特性的变化。可以看出,当在一定范围内改变滑块的最大滑动速度和行程时,控制系统仍然能够实现对太阳能无人机的稳定控制,这体现了控制器系统的鲁棒性。
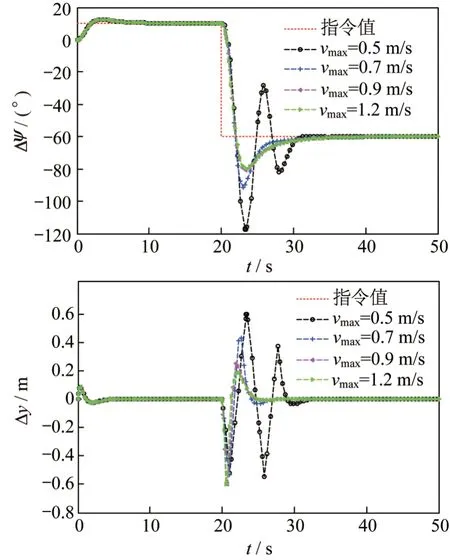
图8 滑块不同滑动速度下系统响应Fig.8 System response at different speeds of the slider

图9 滑块不同滑动行程下系统响应Fig.9 System response at different strokes of the slider
值得注意的是:①当Lmax增加或vmax减小时,系统超调量会有较大幅度增加,由于控制器的设计是基于小扰动线性化假设展开的,系统超调量过大有可能会导致系统状态超出线性近似范围,进而产生难以估计的后果,甚至造成系统发散;②控制系统动态响应过程对滑块vmax的变化较为敏感,当滑块移动速度过慢时,会造成系统时滞现象明显,导致系统发散;另一方面,当滑块滑动速度快到一定程度时,系统动态特性不再随着vmax的变化而产生明显改变。
基于上述分析,并结合图5的仿真结果可知,虽然滑块行程Lmax的增加会带来无人机操纵能力的提升,但也会导致系统超调量的增加,因此在实际应用中滑轨长度的选择应适中。此外,过低的滑动速度vmax可能会导致系统发散,过高的vmax对系统动态性能的提升又是有限的,因此驱动滑块的舵机作动速度的选择也应适中。
3.5 控制效率分析
为了衡量变质心控制方案的控制效率,需要一个合适的评价指标。对此,定义了适用于变质心方案的滑块效率系数ly和适用于传统气动舵面控制方案的副翼效率系数lδa,二者的物理意义类似,其中前者是指单位滑块偏移量所引起的滚转力矩系数的改变值,其表达式可写为

后者则代表副翼单位偏转时所引起的滚转力矩系数的变化量,通常为一个常值。
图10 给出了以上两个效率系数随无人机飞行速度的变化趋势。可以看出:在低速区域内ly远大于lδa;而在高速区域内,尽管lδa大于ly,但二者的差距并不明显。因此,对于飞行速度普遍较低的小型固定翼无人机来说,变质心控制方案相对于传统的气动舵面控制方案来说,具备更高的控制效率。
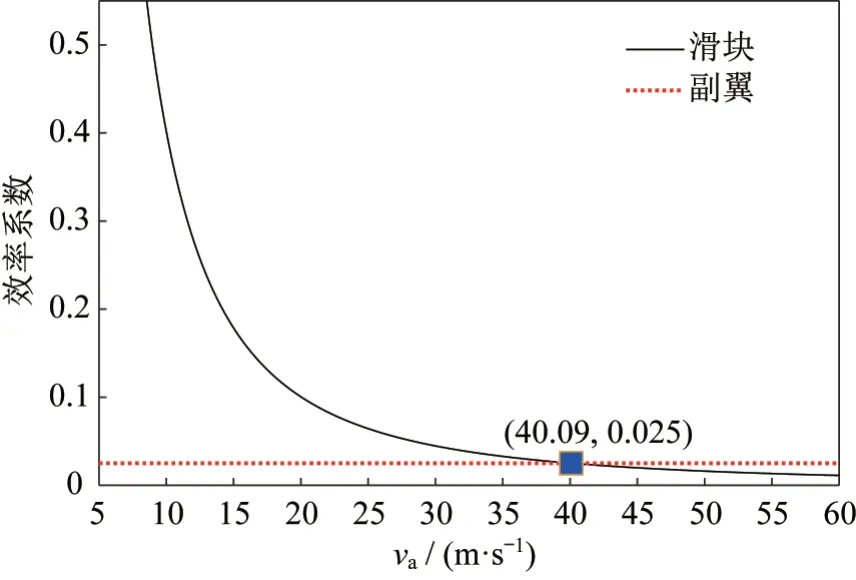
图10 效率系数随速度变化曲线Fig.10 Efficiency coefficients vs.airspeed
4 结束语
本文选取蓄电池作为变质心太阳能无人机的质量滑块,实现了对副翼的替代,可用于操纵无人机的横向运动,且具有良好的鲁棒性和抗风性。滑动行程的增加会带来操纵能力的提升,但这也会导致系统超调量的增加。滑动速度主要影响系统的动态响应特性,过低的滑动速度会导致系统时滞明显,甚至造成系统发散,当滑动速度达到一定量级后,系统动态性能不再有明显的提升。本文设计的横向控制系统以蓄电池代替方向舵作为控制机构,仅以滑块偏移量作为控制量,构造简单,便于工程实现。通过分析得出,滑轨长度和舵机作动速度都应适中选择,从而为临近空间防御领域的工程应用提供参考。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年14期)2022-07-30
电子技术与软件工程(2019年8期)2019-07-16
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中学生数理化·教与学(2019年5期)2019-06-06
中国建筑金属结构(2018年4期)2018-05-23
求学·理科版(2017年10期)2017-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
中学生数理化·高一版(2008年4期)2008-11-15
