
适用高超声速飞行环境的超声速气膜冷却光学窗口研究进展
2021-12-28 10:47易仕和丁浩林
空天防御 2021年4期
易仕和,丁浩林
(国防科技大学空天科学学院,湖南长沙 410073)
0 引 言
当红外成像制导导弹在大气层中以高速(通常指马赫数大于3)飞行时,通常需要利用冷却气膜隔离外部高温主流对红外光学窗口的加热,以避免飞行器光学窗口承受的严重热负荷造成窗口过热淹没目标红外信号,甚至造成成像窗口损坏[1-3]。冷却气膜和光学窗口外部主流相互作用,可能会形成包含边界层、激波、混合层及其相互干扰的复杂流动结构,对目标信号传输产生影响,引起光线出现偏移、抖动、扩散以及能量消减,这种现象一般统称为气动光学效应[4-6],如图1 所示。目前,气动光学效应的存在严重影响了高速红外成像制导的精度,已经成为新一代高超声速精确打击武器研制的关键技术难题之一[7-8]。

图1 超声速气膜冷却光学窗口气动光学效应示意图[5-6]Fig.1 Schematic diagram of aero-optical effects of optical aperture with supersonic film cooling[5-6]
为解决这一难题,本文构建了高超声速气动光学效应地面测试系统,研制了适应高超声速飞行环境的外部制冷光学侧窗,突破了包括超声速冷气膜生成、压力与折射率双匹配气动光学效应抑制和基于大尺度涡破碎原理的气动光学效应抑制等多项核心关键技术,对光学侧窗窗口冷却性能和光学性能进行了实验研究,验证了技术的可靠性。
1 超声速气膜冷却光学窗口模型总体设计
高超声速条件下气动加热作用强烈,导致光学窗口需要承受比低速飞行时更大的气动加热量。为了减小气动加热对于窗口的影响,通常使用侧面光学窗口。为实现光学窗口的可靠冷却,学者们进行了大量的探索研究,提出了包括内流道窗口冷却、制冷马赛克式窗口、外部离散缝喷流冷却、斜向喷流冷却、切向喷流冷却等多种窗口冷却方式,以实现对于高温主流的隔离[9]。大量的实验和计算结果证明,切向喷流冷却技术不仅可以实现侧窗的可靠冷却[10-11],而且结构上相比于内冷式更为简单,通光效率也不受影响[12],而且对于光线传输的干扰也比较小[13-14]。
在进行带切向喷流高速光学头罩设计时,需要耦合考虑多种设计要素的影响,包括成像制导系统、气动光学效应、头部防热、窗口以及气动阻力等问题。结合这些设计需求,建立了带切向喷流高速光学头罩基本模型,如图2所示,为典型带切向喷流平面侧窗几何参数以及成像光束参数示意图。总体而言,高速光学头罩设计是弹头热流指标、成像系统指标、冷却性能指标、气动力学性能指标、容积率指标以及气动光学效应强弱指标的综合。目前,除了气动光学效应强弱指标外,其他指标都已经具有相对比较成熟的理论可指导设计。
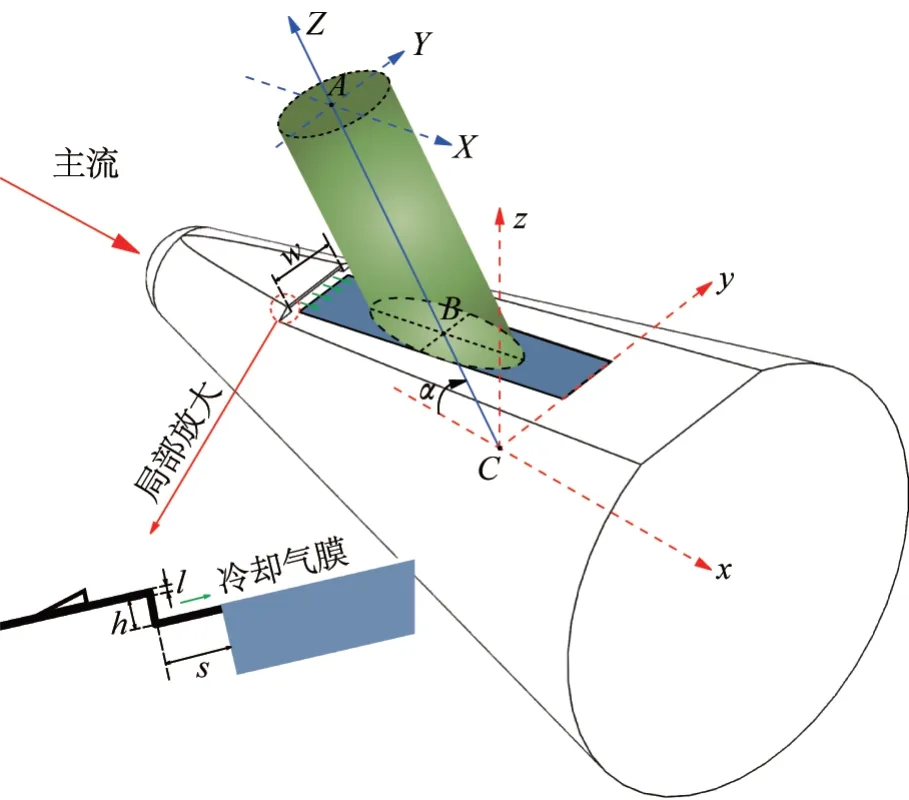
图2 超声速气膜冷却光学窗口几何参数以及成像光束参数示意图[15]Fig.2 Schematic diagram of geometric parameters and imaging beam parameters of optical aperture with supersonic film cooling[15]
2 高超声速气动光学效应实验测试系统
高超高温极端条件下的气动光学实验与测试,是解决高超声速红外成像探测难题的前提和基础。构建完善的气动光学效应测试能力是获取高质量气动光学效应数据的基础。而高质量的气动光学效应测试数据是验证工程设计、仿真结果、耦合控制模型、材料及组件性能,最后进行杀伤力效果评估的基础。
2.1 基于背景纹影的高时空分辨率波前测试技术
图3为双远心光路下利用近场背景纹影技术进行波前测试的原理示意图,通过使用两个聚焦透镜并在其共焦点处布置圆形光阑实现双远心光路。利用双远心光路实现的远场光学系统进行背景纹影测量,一方面减小了传统背景纹影技术的测量误差,另一方面可以提高测试的空间分辨率[16-17]。利用标准平凸透镜定量评估波前测试精度,可保证双远心光路下基于背景纹影波前测试技术的有效性和测量的高精度。提出了双远心光路下波前测试空间分辨率、灵敏度及动态测量范围确定方法,研究了互相关计算中质询窗边长及步长对于波前测试精度的影响[18]。

图3 双远心光路下基于背景纹影技术进行波前测试示意图[18]Fig.3 Schematic diagram of wavefront measurement based on near-field BOS technique under double telecentric configuration[18]
如图4所示,质询窗步长不可过小,当其等于质询窗边长的一半时,可以获取比较理想的重构精度,当然这具体还与观测的畸变场信息有关。对于夏克-哈特曼(Shack-Hartmann,S-H)波前传感器而言,其微透镜阵列上微透镜中心点之间的间隔是不可能小于微透镜直径的。受测试动态范围性能指标的限制,不可能将微透镜尺寸设计得无限小,这在一定程度上限制了S-H 波前传感器波前测试空间分辨率的提高。利用本文所研究的基于背景纹影技术进行波前测试时,通过减小质询窗步长,可以在成倍增加光学观测孔径内等效子孔径数量的同时又不会以牺牲波前测试动态范围为代价。

图4 查问区内质询窗设置示意图[18]Fig.4 Schematic diagram of the interrogation windows arranged in a search region[18]
图5所示为利用该技术测得的不同状态和位置处超声速气膜瞬态波前结果,实际使用测试空间分辨率为111 × 111,最大测试空间分辨率可达447 × 447,相比于索雷博出品的WFS20 系列S-H 波前传感器的最高空间分辨率(47 × 35)而言,空间分辨率至少提升了120倍。

图5 基于近场背景纹影的波前测试技术测量的超声速气膜瞬态畸变波前[18]Fig.5 Transient wavefront results of supersonic film obtained by near-field BOS[18]
2.2 高超声速气动光学效应地面实验系统
图6为国防科技大学空气动力学实验室KD-01高超声速炮风洞,主要由驱动段、被驱动段、实验舱和真空罐组成。风洞全长42 m,驱动段和被驱动段内径为103 mm,喷管出口直径为500 mm。风洞主要采用轻活塞驱动方式,有效运行时间约25 ms。

图6 KD-01高超声速炮风洞[19]Fig.6 KD-01 hypersonic gun wind tunnel[19]
如图7 所示,通过适当延长风洞喷管并且安装层流平板以消除轴对称喷管的边界层以及菱形区波系对气动光学波前测试的影响。分别在层流平板上部和光学头罩下部安装光学隔腔以消除流场以及射流边界的影响。安装在实验舱上的光学窗口可以满足光学头罩前视成像的需求。基于背景纹影的波前测试技术原理,建立如图7 所示的高超声速光学头罩的波前测试系统。远心光路主光轴与窗口之间的夹角α=50.4°;远心光路主光轴与喷流出口之间的距离为L=98 mm;有效测试孔径AD=56 mm;背景点阵距窗口之间的等效距离Zd=1 250 mm。
如图7(a)所示,为了实现短曝光(瞬态)波前测量,利用双腔Nd-YAG 激光器(波长λ=532 nm,脉宽6 ns,单脉冲最高能量可达500 mJ,实际使用200 mJ,跨帧时间Δt=5 μs)对预先设计的随机背景点阵进行照明。瞬态测试采用的相机为Imperx 公司出品的B6620 型双曝光相机,CCD 像素线性尺寸lp=5.50 μm,其标准分辨率可达6 576×4 384 pixels。激光器与相机之间通过同步控制器控制,控制精度可达250 ps,以确保激光照射背景时CCD 同步实现曝光。以上硬件参数决定了瞬态波前测试时对应的曝光时间τ=6 ns,获取的结果对应为状态1。如图7(b)所示,进行较长曝光时间波前测量时,将激光器换成高速摄影光源,搭配高速相机,通过改变高速相机快门时间来控制曝光时间。实验采用的高速摄影光源波长λ=450~465 nm,为了方便进行后续的无量纲处理,取λ=457.5 nm。光线穿过流场及远心光路系统后被高速相机捕获。对应的高速相机空间分辨率为1 563×1 563 pixels,帧频f=2 000 Hz(对应跨帧时间Δt=1/f-τ),CMOS 像素线性尺寸lp=11 μm。通过改变高速相机曝光时间,获取了状态2~5 对应的曝光时间τ=10~499 μs 的波前结果。
图8为长/短曝光波前测试系统运行时序示意图。由于在脉冲风洞中实验时间较短,从流场开始建立、到稳定、再到实验结束,总时间仅有30 ms 左右,而其中流场保持相对稳定的时间大约20 ms。为保证获取流场稳定建立时对应的波前结果,需要对波前测试的时间点进行精确定位。如图7(a)所示,实验采用位于被驱动段出口附近的压力传感器信号作为触发信号。通过设置比较合理的触发延时,高速相机按照预设的时序进行记录,根据记录结果便可以精确定位风洞稳定运行时对应的波前结果,一般单车次可以采集大约20 组有效波前结果。对于瞬态曝光测量而言,其同步控制要求相对更高。主要是因为双曝光跨帧CCD 工作频率比较低,以我们采用的Imperx B6620 CCD 为例,其实际工作频率为1 Hz,双曝光工作下等效采样频率f=2 Hz。通过设置合理的激光器脉冲和相机曝光延时,利用同步控制器对激光器出光和CCD曝光时序进行控制,保证两者同步。同时,为了确定获取的波前结果产生于流场的稳定运行时间段内,利用索雷博(Thorlabs)公司出品的PDA25K2 磷化镓光电探测器(采样频率最高可达9.5 MHz,工作波段150~550 nm),对激光进行监控,实现对波前测试对应时刻实验状态的有效监控。

图7 高超声速气动光学效应地面测试装置示意图Fig.7 Schematic diagram of ground test device for hypersonic aero-optical effects

图8 波前测试系统运行时序示意图[20]Fig.8 Time sequence diagram of the wavefront measurement system[20]
图9所示为利用此瞬态波前测量系统(图7(a))采集到的跨帧时间5 μs的位移Δ云图。由于位移数据反映了流场对于光线的偏折情况,其实质上等价于波前的表面梯度值。基于此梯度值,通过Southwell方法实现波前重构,获取的光程差结果如图9(b)所示。在具体研究中,一般需要将获取的完整光程差(optical path difference,OPD)进行分解,如式(1)所示[21]。

式中:OPDunsteady-tilt为OPD 中的非稳态倾斜分量;OPDhigh-order为OPD 中去除OPDunsteady-tilt后的高阶分量。
如图9所示,上一行依次表示t=t0时刻获取的瞬态合位移Δ分布、OPD、OPDunsteady-tilt以及OPDhigh-order分量。下一行对应了t=t0+5 μs 下的结果。目前,OPDunsteady-tilt可以通过对OPD 进行最小二乘拟合空间平面方程的方法获取[21]。
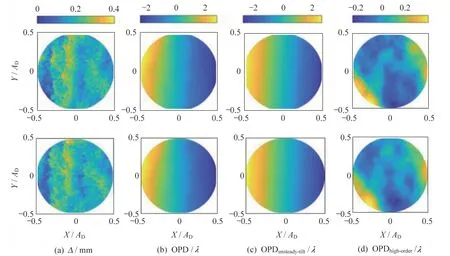
图9 高超声速光学窗口瞬态位移及其相应的OPD结果[20]Fig.9 Transient displacement and its corresponding OPD of hypersonic optical aperture[20]
3 超声速气膜冷却光学窗口气动光学效应抑制理论与关键技术
为保证可靠的窗口冷却和成像,需要突破一系列关键技术,具体涉及超声速冷却气膜生成喷管型线高质量设计、冷却气膜与主流折射率/压力双匹配设计以及基于流动控制的气动光学效应抑制等。
3.1 气动光学窗口超声速冷却气膜生成技术
为实现超声速气膜流场,模型设计了一个二维喷管,其出口与窗口壁面相切,喷流组件中最重要的部件就是超声速喷管,其质量的好坏对所生成气膜的冷却效果和光学性能有直接影响。影响喷管质量的因素主要有喷管型面设计、喷管加工精度等。
通过利用本课题组开发的基于B样条曲线的喷管短化设计方法[22],已经完成了对于喷流喷管的设计,加工制作了喷管实物,并对其进行了马赫数校测。喷管出口高度为5 mm,唇厚为1 mm,喷管出口宽度为104 mm,喷管出口马赫数设计为3.1,实校值3.05,截面马赫数均方根偏差2.1%[23]。图10给出了超声速冷却气膜喷管设计流场区域分布示意图。在喷管上设计有两个传感器安装点,用于安装压力传感器,传感器安装点1直接与实验舱环境联通,主要实现对实验舱静压的测量;传感器安装点2与喷管驻室联通,实现对喷流总压的测量。结合超声速冷气膜自适应控制技术,确保不同飞行状态超声速气膜对成像窗口的有效覆盖。

图10 超声速冷却气膜喷管设计流场区域分布示意图[22]Fig.10 Schematic diagram of design flow field of supersonic cooling film nozzle[22]
3.2 压力与折射率双匹配气动光学效应抑制
从本质上讲,气动光学畸变主要是由折射率变化引起的,所以在进行气膜冷却装置设计时,仅通过压力匹配,减少因复杂波系存在而导致的密度场梯度引起的折射率场变化是不够的。这就要求在进行气膜冷却装置设计时,在满足压力匹配的条件下,同步考虑折射率匹配条件。所以,本文主要通过折射率和压力同时匹配思路,来探索混合层气动光学性能的改善方法。提出超声速冷气膜与高超声速来流双匹配气动光学效应抑制理论,发明基于He/Ar 混合气体的折射率匹配技术。以氦氩混合气体为例,对此种冷却方法进行说明。假设氦气、氩气在混合气体中所占的质量比分别为x和(1-x),结合气体状态方程、折射率和压力匹配条件,可以推导出[24]

式中:γj表示混合气体比热比;T0和Tc,0分别表示来流总温和冷却气体总温;P表示压强;K表示Gladstone-Dale 常数;ρ表示密度,下标c 表示冷却气体,下标e 表示外部流动边界层外缘参数;μ表示气体分子量;Rˉ为普适气体常数;下标He和Ar分别表示氦气和氩气;下标j表示多组分气体。
由(2)式可知,相比于通过配置冷却气体总温的方法,此时需要配置的要素转变为冷却气体的组分构成,即可以在冷却喷流总温为常温时实现折射率和压力同时匹配。从图11中可以看出;在冷却气体总温比较低时,氦气所占的质量比例较大;反之,当冷却气体总温比较高时,氦气所占的质量比例较小。总体而言,在冷却气体总温恒定的情况下,其组分构成随飞行高度的变化比较小。

图11 冷却气体中氦气所占质量比关于其总温和飞行高度的曲面图[24]Fig.11 Mass fraction of helium versus total temperature and flying height[24]
基于获得的折射率场结果,通过光线追迹方法获得了如图12 所示的沿流向分布的光程差。从图12 可以看出,在相同的冷却喷流参数下,相对于空气或者纯Ar,基于He(30%)/Ar(70%)混合气体的设计结果有比较明显的提升,光程差减小了大约一个数量级,可以达到纯He的光学质量。

图12 光程差沿流向分布曲线[24]Fig.12 OPD distribution along streamwise[24]
3.3 基于大尺度涡破碎原理的气动光学效应抑制
总体而言,气动光学效应抑制的本质在于对密度脉动的抑制。湍流中的大尺度结构在一定程度上主导了流场的密度脉动时空分布特性,从理论上讲,通过将流动中大尺度涡结构破碎至小尺度,可以达到密度脉动强度抑制的目的,进而实现气动光学效应抑制。
如图13所示,实验采取的模型为带切向超声速气膜的高超声速光学头罩。微型涡流发生器(micro vortex generators,MVGs)阵列布置在喷管出口上游20 mm处,其高度r=1 mm(≈30%δ)。单个微型涡流发生器顶视图为等腰梯形,上底边e=0.5r,下底边t=1.5r,高c=5r。整个涡流发生器阵列包括40个单独涡流发生器,相邻涡流发生器之间间距为2 mm,①和②分别表示对应微型涡流发生器中间线(z=0)。
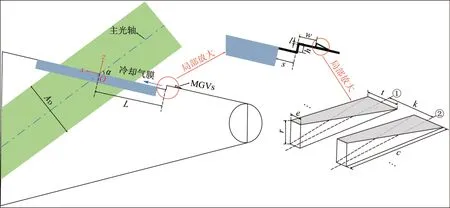
图13 高超声速光学头罩实验模型及流动控制装置(微型涡流发生器)示意图[6]Fig.13 Schematic of testing model and flow control device(MVGs)[6]
在去除掉OPD 中的不稳定倾斜分量(OPDunsteady-tilt)之后,可研究有/无流动控制下喷流压比(pressure ratio of jet,PRJ)对OPDhigh-order的影响,OPDhigh-order对应的光程差空间均方根值(root mean square of OPD,OPDrms)作为主要评价指标。基于不同状态下获取的OPDhigh-order对应的OPDrms结果,绘制了如图14 所示的OPDrms关于PRJ 的变化曲线。由图14 可知,微型涡流发生器的引入显著抑制了不同PRJ状态下的OPDhigh-order。图14 中,“○”和误差棒分别表示同一状态下瞄视误差(bore-sight error,BSE)的平均值和均方根值。与此同时,微型涡流发生器的使用降低了不同时刻OPDhigh-order的差异,即提高了波前的稳定性。

图14 有/无流动控制状态下OPDrms关于PRJ变化曲线[6]Fig.14 Relationship curve between OPDrms and PRJ with/without flow control[6]
如图14 所示,有流动控制下的OPDrms小于无流动控制下的结果。与此同时,有流动控制下的OPDrms不同时刻的差异性要小于无流动控制下的结果。主流与喷流之间的剪切混合过程可能会在窗口区域影响K-H 转捩过程[8],其中的大尺度结构具有相对明显的不稳定特征,而大尺度结构对于气动光学效应影响较为显著,这可能是无控制状态下OPDrms不同时刻差异性比较大的原因。如图15所示,伴随着流动控制装置的引入,主流边界可能已经提前转捩,存在抑制K-H 转捩发展。在相同情况下,随着PRJ 的增加,OPDrms同样倾向于增加。这可能是由于随着PRJ 增加,实际上对应着喷流流量的增加,这种增加可能会导致喷流厚度的增加,存在引入更多的涡结构进入流场的可能。

图15 有/无主流边界层流动控制下超声速冷却气膜流动显示结果[8,25]Fig.15 Flow visualization of supersonic film cooling with/without mainstream boundary layer flow control[8,25]
4 超声速气膜冷却光学窗口实验测试研究
4.1 流动特性研究
如图16(a)所示,在气动加热量不大的情况下,可以采用侧面凹窗的方法减小气动加热。虽然其窗口温度可能会比图16(b)所示的窗口温度有所降低,但是其流场结构明显复杂得多。与此同时,在实际使用时,无窗口冷却的情况仅能适用于相对较低的飞行马赫数或者相对较高的飞行高度,此时对应的窗口受到主流加热作用相对较弱。随着飞行速度越来越快,飞行高度越来越低,主流对于窗口的加热作用越发显著,不仅会将目标的红外信息淹没,严重的甚至导致光学窗口损坏。这就使得侧窗冷却成为必须措施。如图16(c)所示,为基于纳米粒子平面激光散射(nano-tracer-based planar laser scattering,NPLS)技术获取的压力匹配(PRJ =1)状态下带切向喷流高速光学头罩绕流流动显示结果。相比于图16(b),喷流的引入的确使得流场的结构变得更为复杂,冷却剂层、冷却喷流与主流形成的剪切混合层以及附加激波结构客观上增加了气动光学效应中光学传输效应增强的可能性。
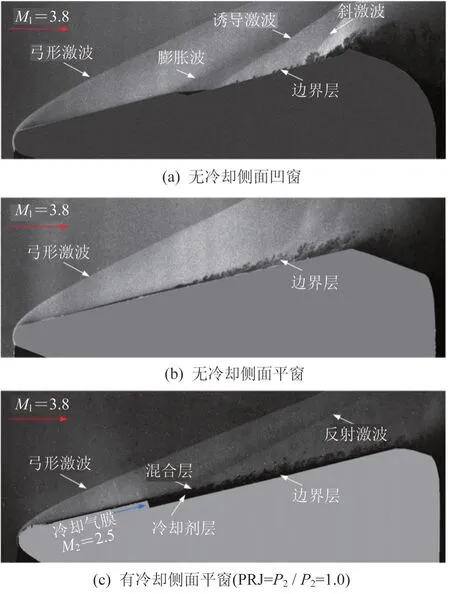
图16 超声速(马赫数3.8)光学头罩流动显示结果(P0=0.1 MPa;T0=300 K;ρ∞=0.039 kg/m3)[15]Fig.16 Flow visualization results of supersonic(Mach 3.8)optical dome(P0=0.1 MPa;T0=300 K;ρ∞=0.039 kg/m3)[15]
4.2 气膜冷却性能研究
在进行带切向喷流光学头罩设计时,最重要的工作之一便是超声速气膜冷却性能设计。冷却气膜设计最主要的目的是实现对光学窗口的有效冷却,在兼顾光学性能的同时尽可能减少对于气源的需求。通过对大量实验数据的整理和分析,Majeski and Morris[11]对带切向喷流的钝头体气膜冷却效率η相似准则进行了总结,构建了一个已经得到大量实验和数值研究验证的η无量纲关系式,即

式中:c和d为拟合系数,且c为正数,d为负数;η为冷却效率;S*为无量纲流向坐标。η=表示绝热壁温,T0,1表示主流总温,T0,2表示冷却喷流总温。无量纲流向坐标,其中:x为喷流沿流向坐标;h为喷流出口高度;ρ,u,μ,a分别表示密度,速度,粘性系数,声速,下标1表示主流,下标2表示喷流;吹风比,对流马赫数冷 却 喷 流 雷 诺 数Re2=ρ2u2h μ2。
利用KD-01 高超声速炮风洞,对切向喷流冷却的冷却效率进行了大量的研究,尤其关注吹风比和攻角的影响,不同喷流总压下对应的吹风比汇总在表1中。由实验结果发现,压力匹配的状态下(喷流出口静压等于主流静压)可以实现大区域的冷却,尤其是在小攻角测试条件下。S*可以根据表1 中的数据计算得到,对数坐标下冷却效率曲线η–S*,如图17所示。

表1 冷却喷流状态汇总[10]Tab.1 Flow condition summary of cooling jet[10]
式(3)中,变量c和d被统一设置为1,以强调相关系数S*的影响。图17(a)~17(c)显示了不同攻角、主流马赫数和吹风比下的曲线分布。在0°和-4°攻角下,从17(a)和17(b)可以看出,曲线符合很好。在-10°攻角下,马赫数的影响比较显著。不同主流状态下,完全冷却区域的曲线符合良好,只是从加速下降点开始出现明显的分叉。图17(d)显示了Ma=7.3下不同攻角和吹风比对曲线的影响,可以看出,不同攻角下数据符合的程度并不理想,这意味着式(3)对于攻角的影响比较敏感。

图17 不同攻角和马赫数下η-S*关系[10]Fig.17 η-S*relation curves under different attack angles and Mach numbers[10]
4.3 气动光学效应研究
瞄视误差(bore-sight error,BSE)是影响高超声速飞行器成像制导、威胁感知以及星光导航精度的重要因素之一,下文中将具体探讨基于微型涡流发生器阵列的气动光学效应抑制方法对BSE 影响的作用规律。前文中已经提到,BSE 主要是由畸变波前中的不稳定倾斜分量OPDunsteady-tilt引起。BSE 可以定义为点扩散函数(point spread function,PSF)峰值点位置的移动,为了获取BSE 结果,计算了OPDunsteady-tilt对应的PSF。如图18所示,其中,“Ref.”对应了无畸变波前计算的PSF结果,“Exp.”对应了OPDunsteady-tilt计算的PSF结果。对比来看,两者对应的PSF 结果在形状和峰值上差异比较小。对比分析OPDunsteady-tilt和完整OPD 计算的OPDrms结果,发现由OPDunsteady-tilt贡献了超过90%的OPDrms。这也正是在偏折角度比较大的情况下大孔径近似(large aperture approximation,LAA)失效的原因之一。如图18所示,OPDunsteady-tilt导致的PSF峰值位置移动主要是沿流向的。

图18 无畸变波前(Ref.)/OPDunsteady-tilt(Exp.)计算的归一化PSF[6]Fig.18 Normalized PSF calculated from undistorted wavefront(Ref.)and OPDunsteady-tilt(Exp.)[6]
完整的OPD 中,OPDunsteady-tilt主要影响点扩散函数峰值点位置,并不影响点扩散函数的形状以及峰值大小,一般仅导致成像偏斜,并不会导致成像模糊等效应。在下文对成像质量的研究中,本文阐述的波前主要指去除不稳定倾斜分量之后的高阶畸变波前。如图19 所示,在曝光时间6~499 μs 范围内,随着曝光时间的增加,高阶畸变波前对应的OPDrms逐渐增大,同时增加的幅度逐渐减小。τ=499 μs时对应的结果与τ=100 μs 对应的结果基本不变,即随着曝光时间的增加,获取的高阶畸变波前基本为定常值,这意味着成像质量并不会持续恶化。同时,如图19中的局部放大示意图所示,在同一曝光时间下,短曝光时,不同时刻OPDrms的差异明显大于长曝光时获取的结果,并且随着曝光时间的增加,这种差异逐渐减小。当曝光时间达到499 μs时,这种变化接近于零。也就是说,对于本章研究的高超声速光学头罩扰流气动光学效应而言,当曝光时间为499 μs时,获取的结果已经基本可以看作是时间定常的结果。不过需要注意的是,这里研究的波前结果是去除一阶畸变项后的,高阶畸变波前中基本不再包含由大尺度结构导致的不稳定倾斜分量,即本文并未研究光线抖动对于气动光学OPDrms的贡献问题。当然,考虑到本章研究的对象光学孔径相对比较大,这部分的抖动分量的影响可能比较小。
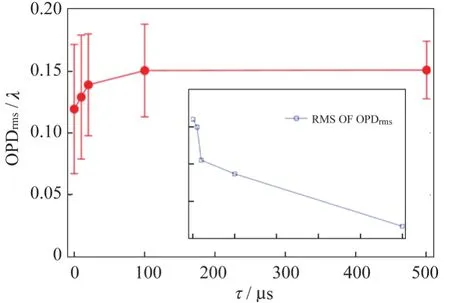
图19 不同曝光时间下OPDrms结果[20]Fig.19 OPDrms results under different exposure times[20]
总体而言,长曝光积累了比较多的畸变信息,导致其最终的OPDrms要大于短曝光下的结果。具体对于成像制导导弹而言,在弹目距离比较远时,为了提高导引头作用距离,一般需要增加帧积分时间,甚至降低帧频以最大限度地增长曝光时间。曝光时间的增加在一定程度上会增加波前畸变的程度,不过这种增加是有限度的。也就是说,在不计测试平台振动影响的情况下,针对低可探测目标,可以通过较大幅度增加曝光时间来提高信号强度,图像质量并不一定会严重受损。当然,这里也并未考虑因长曝光造成的动目标成像拖尾问题。
在有像差的情况下,对应光学系统衍射图形艾里斑处的光强(最大亮度处)与无相差理想成像时对应光强的比值,被定义为SR 值,此值可以表征图像强度衰减、能量损失的程度。SR作为衡量气动光学效应强弱的重要指标,应用十分广泛。同一曝光时间下,不同时刻获取的SR 的平均值<SR>对应绘制在图20中,并与基于OPDrms的平均值<OPDrms>,利用LAA预测的结果进行对比。由图20可发现,对于高超声速光学头罩扰流引起的气动光学波前中的高阶畸变分量OPDhigh-order,在不同曝光时间下,LAA 都可以对SR值实现比较理想的预测。随着曝光时间的增加,SR值逐渐减小,状态5 与状态4 对应的SR 之间的差别不大,基本稳定在0.44左右。

图20 理论计算SR值与根据OPDrms利用LAA预测结果对比[20]Fig.20 Comparison of the theoretical calculation SR with the SR predicted by the LAA[20]
进一步分析可知,光学传递函数(optical transfer function,OTF)的运用可以更为全面地分析曝光时间对成像质量的影响。OTF是PSF的二维傅里叶变换。OTF 的幅度部分(即OTF 的模量)为调制传递函数(modulation transfer function,MTF),多用于描述像斑反衬度的衰减。下面,将主要利用MTF 分析高超声速光学头罩成像系统在气动光学效应影响下的成像质量。图21 为不同曝光时间下高超声速光学头罩绕流气动光学效应对应的幅值传递函数分布结果。横坐标中:v表示二维空间频域的径向频率距离,v=,Fx和Fy分别为直角坐标系下沿x方向和y方向的频率参量;v0=为非相干成像系统的截止频率,λ为光线波长,f为成像系统焦距。图21 中黑色虚线表示理想无畸变波前成像结果。相比于理想成像,气动光学效应导致成像质量出现比较明显的恶化。在图21 中,径向频率距离相对较小的部分(v/v0<0.46),随着曝光时间的增加,MTF 分布曲线出现小幅度的提升。对于成像质量而言,MTF低频部分一般表征了图像的反差。这种小幅度的提升,说明随着曝光时间的增加图像反差得到小幅度的改善。而对于径向频率距离相对比较高的部分(v/v0>0.46),随着曝光时间的增加,MTF 出现比较明显的减小。考虑到高频部分一般对应着成像的细节部分,这意味着随着曝光时间的增加,图像细节部分会出现比较明显的丢失。状态4 和状态5 下近似重叠的MTF曲线,也印证了当曝光时间增加到一定程度时图像质量渐趋稳定。
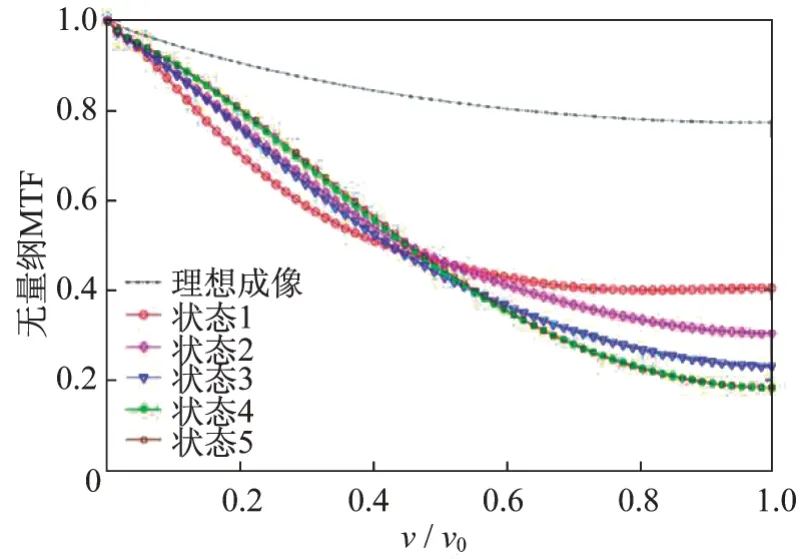
图21 不同曝光时间下幅值传递函数结果分布[20]Fig.21 MTF distribution under different exposure times[20]
5 结束语
高超声速条件下,气动光学效应的存在严重影响红外成像制导精度,已经成为新一代高超声速精确打击武器研制面临的关键技术难题之一。为解决这一难题,亟待研制适用高超声速飞行环境的超声速气膜冷却光学窗口,其中涉及超声速气膜冷却光学窗口总体参数设计、实验测试系统研制以及气动光学效应抑制等一系列理论和技术创新。通过归纳和总结这方面的研究进展,希望能为适应高超声速飞行环境的光学窗口研制提供一些参考和帮助。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
初中生学习指导·中考版(2022年4期)2022-05-12
凤凰动漫(军事大王)(2022年1期)2022-04-19
兵器知识(2021年11期)2021-11-27
军事文摘(2020年8期)2020-08-12
百科探秘·航空航天(2020年8期)2020-07-29
锦绣·下旬刊(2020年9期)2020-01-28
中学生数理化·中考版(2016年2期)2016-09-10
数理化学习·高三版(2009年2期)2009-04-03
