超声超分辨率微血流成像研究进展
2021-12-26 02:46钟传钰郑元义
中国医学影像技术 2021年12期
钟传钰,郑元义
(1.上海交通大学医学院,上海 200025;2.上海交通大学附属第六人民医院超声医学科,上海 200233)
人体毛细血管直径小于10 μm[1],而数量极其庞大;微血管改变可作为诊断疾病和评价预后的有效指标,但目前肉眼无法识别小于100 μm血管所形成的微循环[1]。MRI、CT、核素显像和超声的分辨率仅为亚毫米或毫米级。超声超分辨率微血流成像(ultrasound super-resolution microcirculation imaging, USRmi)为解决相关问题带来了希望。本文就USRmi起源、超声定位显微镜具体操作步骤及其临床前应用进展进行综述。
1 USRmi起源
超声超分辨率成像提出于20世纪80年代[2],以分离来自比经典衍射极限更接近源的回波。超声成像的分辨率极限与波长有关,波长减小则超声波吸收显著增加,波长过短会对成像深度构成限制,故临床超声成像分辨率的极限为百微米[3]。2006年,荧光光激活定位显微镜(fluorescence photoactivated localization microscopy, FPALM)、光激活定位显微镜(photoactivated localization microscopy, PALM)和随机光学重建显微镜(stochastic optical reconstruction microscopy, STORM)等新技术的出现打破了光学衍射极限[4-6];受其启发,超声超分辨率成像的基本思想是基于系统点扩散函数(point spread function, PSF)定位每个随机闪烁的荧光源的质心,其位置信息堆叠于快速相机捕获的实质性顺序数据集上,形成以亚波长分辨率实现空间分辨率的图像,由此实现数十纳米的空间分辨率。ZHENG等[7]于2009年提出以超声造影(contrast enhanced ultrasound, CEUS)测量小血管内流速,采用谐波超声成像技术跟踪超声微泡在高帧频下的运动,后经不断改进而形成超声定位显微镜(ultrasound localization microscopy, ULM)技术,通过顺序观察不同微泡,可避免微泡之间的干扰,于每帧图像中检出孤立的源;已知射频通道数据或波束形成图像的PSF时,可对微泡进行微测量精度定位,并通过积累亚波长定位而生成超分辨率微血管图。
2012年,ROY等[8]尝试针对超声微泡直接及以多普勒角度独立测量小血管内血流速度,利用谐波超声成像跟踪微泡运动,并计算在体兔耳中心动脉平均流速。SIEPMANN等[9]采用上述方法检测在体质心,以改善稀微气泡最大强度投影技术。至2013年,ULM已可区分体外两支相距小于半个波长的血管[10]。之后出现了1.5D阵列[11]和半球阵列[12]两种三维超分辨率方法,成功将超分辨率成像应用于小鼠耳部模型[13]和大鼠大脑模型[3]。
2 ULM技术步骤
图1所示为不同ULM技术的共同基础[1]。

图1[1] USRmi处理步骤 (Acquisition:获取;Detection:检测;Isolation:分离; Localization:定位;Tracking:追踪;Mapping:映射)
2.1 导入微泡 目前超分辨率定位单个微泡均涉及造影剂导入途径[1]。基本定位方法要求微泡浓度足够低,以便在处理后滤波后利用图像系统衍射的有限PSF实现气泡空间分离;基于稀疏的方法[14]和基于深度学习(deep learning, DL)方法[15-16]可满足上述要求,并允许较高浓度。
2.2 采集录像 将B模式超声脉冲发射到含有微泡的介质中后,以常规或超快帧速率获取微泡流录像,并收集基于每个通道射频数据的矩阵或波束形成的图像数据[1]。
2.3 运动校正 通常针对最小血管采集长录像。超分辨率图像由叠加局部变化而产生,帧的运动显著影响其可视化,且临床面对的运动尺度常常较大,故运动校正至关重要。
2.4 检测微泡 区分微泡与周围组织为关键步骤之一,为后续定位提供候选区域,以便最终绘制图像;检测不足意味着定位困难[1]。错误信号过多给后续滤波过程带来挑战,为图像噪声来源。一般根据所用频率选择提取微泡信号技术,而频率则取决于成像深度。较高频率下微泡谐振性差、散射谐波小,故基于微泡运动或破坏的技术更为可取。DL技术亦可用于分离微泡与组织[17]。非线性技术有利于接近共振,可采用脉冲反演和振幅调制方法提取微泡信号。
2.5 微泡分离 滤波步骤可用于识别每帧图像中的孤立微泡[2]。图像中来自不同微泡的回声相互干扰,可致定位不准确,在当前阶段或跟踪阶段应予排斥,且每帧图像仅能检出有限数量的微泡,以免重叠。血液中微泡浓度相对较高时,可通过限制每帧检出微泡数量而实现信号分离。DESAILLY等[11]以成对帧减实现超快成像帧速率,通过检测微泡快速运动或破坏引起的连续超声回波之间的去相关而隔离微泡。破坏微泡不仅限制微泡跟踪能力,更不利于对微血管中流动微泡的可视化,故不可取。降低血液微泡浓度是实现孤立信号的最直接方法;通过输注可保持微泡浓度恒定,以尽可能降低信号重叠。检测和分离技术往往相互交织,以减少每帧可见微泡量。
2.6 定位 定位孤立信号是ULM技术的另一关键。超声波在组织中传播时具有相干性,一般由成像系统的PSF定义单个孤立的点散射体的响应。微泡衍射受限图像来源于单一的源,估计其位置时,允许精度远远超过衍射极限。实际工作中,定位精度决定图像分辨率的极限。定位显微镜技术通过限制每帧图像中检出的源的数量而避免其响应相互干扰,以获得远高于系统衍射极限分辨率的精度,于数千帧图像上积累定位流动微泡,最终生成超分辨率血管结构图像。提取和分离组织中单个微泡时,微泡信号的信噪比对于定位算法的性能至关重要。选择较大的微泡群有助于提高单个微泡的信噪比[18-19]。SONG等[20]以超快平面波成像解决人体超分辨率成像的潜在噪声问题,丰富的时间和空间信息有利于分离微泡信号与背景噪声。
2.7 跟踪 通过微泡在两帧图像之间的位移可创建速度矢量,详细的速度图可显示局部血管速度特征。跟踪局部点可确定微血管中微泡的路径和速度,极大提高图像和信息质量,并修改其解释,其空间分辨率比多普勒更具优势,且在很大程度上与流动位移方向无关;其重要优点之一是排除了人工微泡,仅保留具有相干路径的微泡而形成噪声较低的图像。目前ULM技术创建图像多已不再是简单积累微泡的亚波长位置,可沿轨道各种定位其位移而实现插值。一些学者[3,13]尝试以此建立每个微泡在微米尺度上的方向和速度。基于卡尔曼(Kalman)滤波器跟踪微泡能显著提高跟踪精度[21]。
2.8 可视化 运动校正后于微泡位置创建地图能可视化定位、密度或计算速度,揭示血管网络细节,可通过检测反映超分辨率细节尺度的像素大小的细网格中积累的微泡或将每次定位绘制为高斯分布而实现,其值反映定位的不确定性。
3 USRmi用于医学领域
3.1 癌症 超声成像成本低且安全[22],可作为癌症的首选影像学检查方式。乳腺癌现已成为最常见的癌症[23]。GHOSH等[24]以USRmi纵向监测小鼠三阴性乳腺癌微血管网络变化,发现靶向治疗后肿瘤组织的血管组织比逐渐下降,表明USRmi具有在体监测早期肿瘤对药物治疗的反应的潜力。
传统灰阶或多普勒超声技术难以可视化早期肿瘤微血管结构,而高分辨率对比超声能检出血管生成的生物标志物[25-27]。2012年,GESSNER等[25]提出一种高分辨率超谐波成像技术,即声学血管造影,能可视化肿瘤相关微血管异常,并检测肿瘤引起的体内血管生成相关形态异常,但其分辨率受限于成像系统频率。ULM技术使USRmi成为潜在的强大工具,可通过血管生成标记识别恶性肿瘤。LIN等[26]以USRmi观察大鼠纤维肉瘤的三维微血管模式(图2),并与健康组织相对照,显示肿瘤血管生成特征,如高度弯曲等,图像空间分辨率相比传统声学血管造影大幅提升。
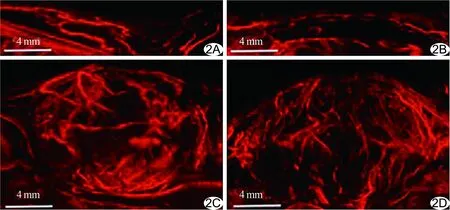
图2[26] 应用超分辨率成像三维微血管模式可视化大鼠纤维肉瘤的最大强度投影图像,显示健康微血管结构(A、B)和肿瘤相关微血管(C、D)3D结构
ULM用于临床应超越简单描述微血管形态而允许提取相关生物标志物。2018年,OPACIC等[27]提出运动模型超声定位显微镜(motion model ultrasound localization microscopy, mULM)作为先进跟踪技术用于临床,采用标准帧速率常规超声设备可于不足1分钟内提取超分辨率图像和新的参数,准确识别不同血管表型肿瘤(图3);通过USRmi可导出其功能参数,包括相对血容量、血流方向、血流速度、血管距离和速度,并可区分不同类型肿瘤,有望成为诊断肿瘤和监测治疗不可或缺的工具。USRmi重建微血管网络精细结构可帮助诊断恶性肿瘤或区分不同类型肿瘤。
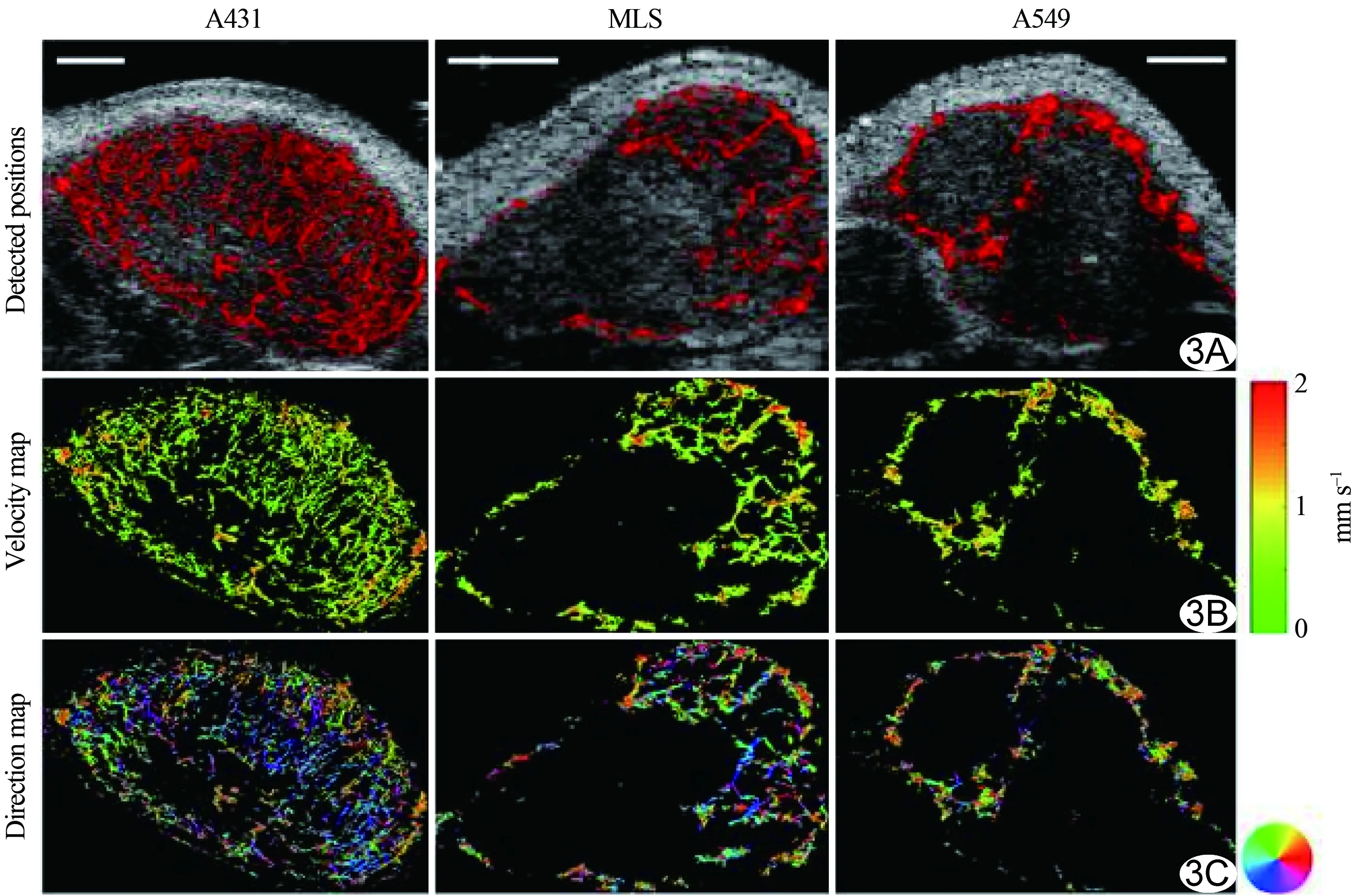
图3[27] 基于mULM的不同血管表型肿瘤参数图 彩色编码地图显示微泡覆盖检测位置,示相对血容量(A)、单个微泡速度(B)和微泡血流方向(C)
3.2 神经病学 CT血管造影(CT angiography, CTA)和MR血管成像(MR angiography, MRA)为临床常用脑血管成像方法,其血管解剖成像分辨率为毫米级,且对血流动力学不敏感。由于颅骨可致声束明显衰减和失真,超声脑血管成像主要用于新生儿和开放颅骨脑手术[28]。超快超声成像极大地提高了对脑血流的敏感性。基于超声波的脑功能成像以检测脑血管容量变化替代脑活动,其诞生标志着超声医学已进入神经成像领域。ERRICO等[3]于2015年以15 MHz超声波探针穿过大鼠头骨,采用超快超声定位显微镜(ultrafast ultrasound localization microscopy, uULM)行大脑微血管成像(图4),其分辨率可用于9 μm(1/10λ)的血管,并以150 s扫描时长实现了平面内血流剖面。2018年COUTURE等[29]通过定位孤立的小于20 μm微泡,跟踪并积累微泡移动位置而生成超分辨率图像,克服了空间分辨率的衍射极限。
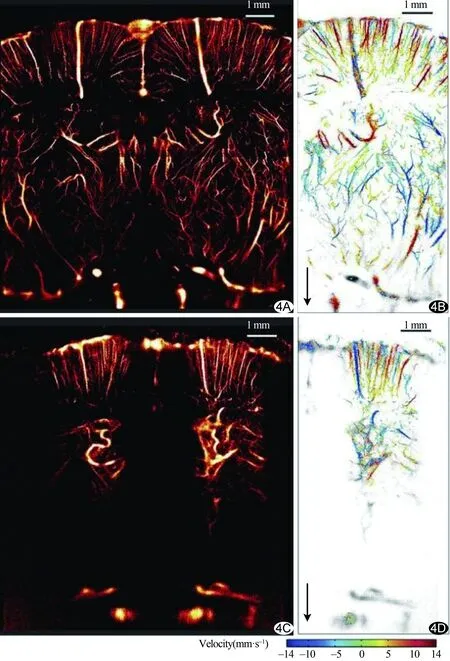
图4[3] 采用超速扫描仪通过头骨骨质稀疏部位行大鼠脑血管超分辨率图像(15 MHz) A.于头骨较薄处行冠状位uULM,得到10 μm×8 μm的深度和横向分辨率; B.来自A的部分血管的平面内速度图; C.经完整头骨行uULM,获得12.5 μm×1 μm的深度和横向分辨率,可检出最小血管宽度为20 μm; D.来自C的部分血管的平面内速度图 (箭示血流方向)
迄今为止尚无任何在体、非侵入性成像技术可捕获人脑毫米分辨率以下解剖和功能特征。相比之下,将USRmi动物模型成果向临床转化是更为紧迫的现实问题。2021年DEMENÉ等[30]静脉注入微泡,以超快ULM行微米级分辨率经颅深层成像,获得人脑血管及相应量化血流动力学参数,解决了经颅ULM(transcranial ULM, t-ULM)空间分辨率低、颅骨畸变和运动伪影等主要问题,表明这种低超声波频率、预期低信噪比的技术不仅可在存在运动的情况下用于成人大脑,且分辨力可达25 μm,远远超过了功能超声成像的1 mm分辨力;除显示解剖结构之外,还可表征动脉瘤的血流动力学(图5)。USRmi在神经病学领域具有巨大潜力,可极大提高对大脑的理解及对神经疾病的监测能力。
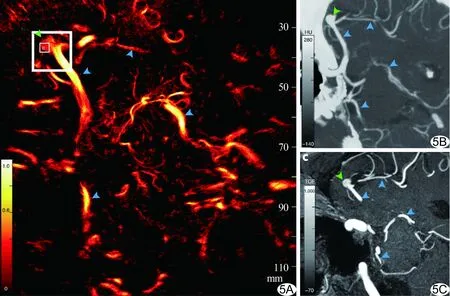
图5[30] t-ULM显示深部动脉瘤 A.右大脑中动脉瘤患者倾斜轴向脑切片ULM(获得24 s); B、C.与之对应的6 mm(B)、7 mm层厚(C)CTA最大强度投影图 (绿箭头示右大脑中动脉瘤,蓝箭头示血管,白框示载瘤区)
3.3 肾脏病学 2017年FOIRET等[31]将USRmi用于肾脏微血管,以专用高帧率成像序列定位大鼠肾脏内单个微泡,通过假设刚性运动(翻译和旋转)跟踪器官运动并加以校正,同时跟踪微泡以评估小血管血流速度,结果表明该技术具有改善血管表征的潜力。SONG等[20]在USRmi噪声方面取得突破,超快成像的丰富时空信息支持分离微泡信号与背景噪声,将非局部手段去噪滤波器用于微泡数据时空域,以保存微泡运动轨迹,并抑制随机背景噪声。CHEN等[32]应用USRmi技术,以降至32 μm分辨力的成像模式成功识别肾脏微血管,于缺血-再灌注损伤肾脏观察到肾纤维化,并发现肾脏大小、皮层厚度及相对血容量均与微血管密度显著下降有关,提示这项技术可作为监测进行性肾病的有前途的诊断工具。ANDERSEN等[33]以改进的临床超声仪获得大鼠肾脏健康血管的高度详细的超声超分辨率图像(图6),显示不同大鼠微泡数量的变化,结果显示该法可广泛用于研究肾脏疾病。
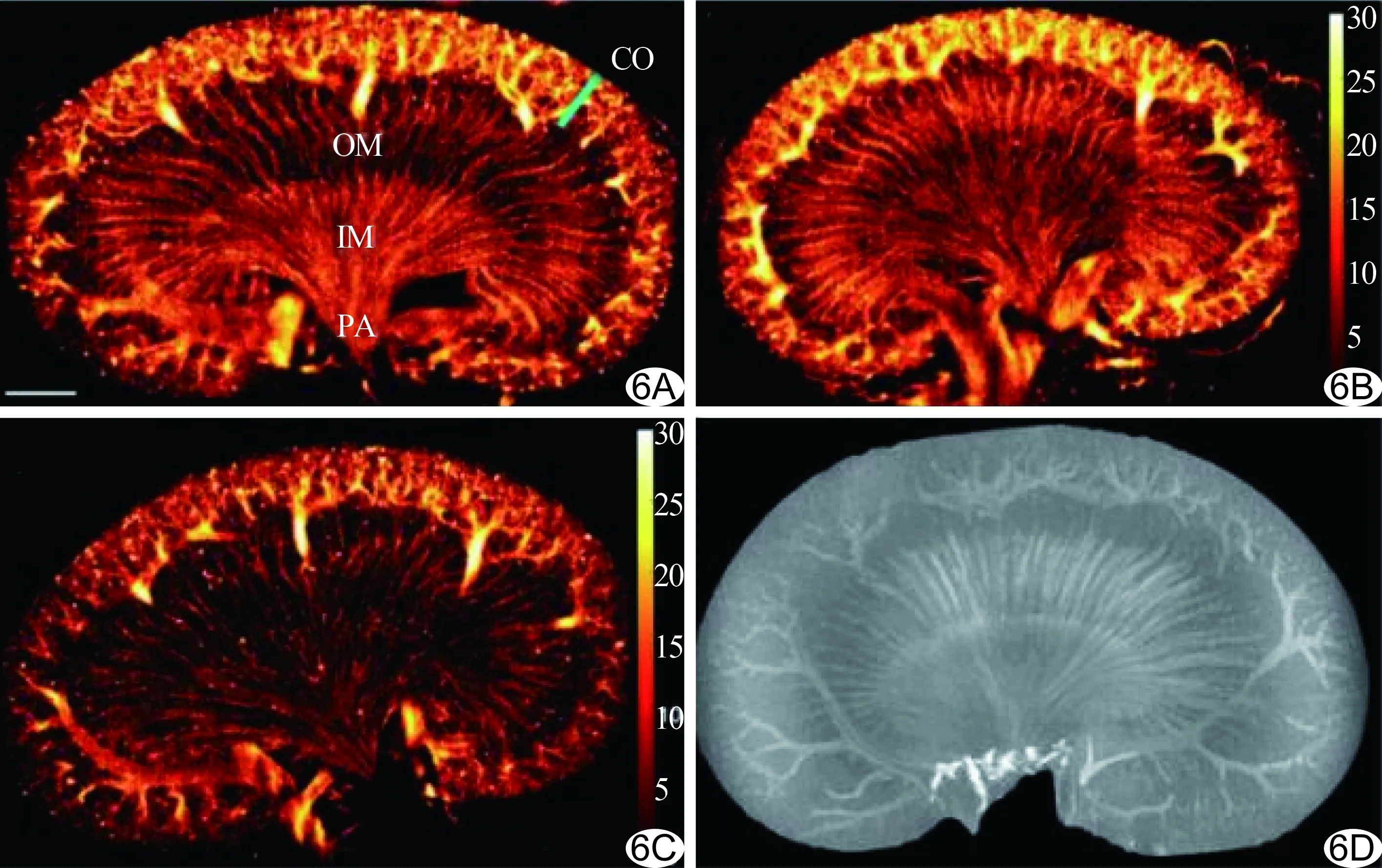
图6[33] 健康大鼠肾微血管的超分辨率图像 A.致密皮层(CO)微血管网与外髓质(OM)和内髓质(IM)的直小血管之间有明显的区别,其向下延伸至乳头(PA); B.平均每帧检测到117个微泡的图像; C.平均每帧检测到70个微泡的图像; D.MR T1增强图像
此外,USRmi已用于观察2型糖尿病小鼠骨骼肌微血管[34]、兔淋巴结微血管[35]及兔眼部微血管[36]等,未来将用于动物所有器官,最后应用于人体。不久的将来ULM会成为一种诊断模式,提供深部组织的微观层面生物信息。
4 总结
过去10年中,USRmi主要通过ULM技术克服了超声成像的衍射极限,并用于癌症、脑及肾脏等领域研究,但其临床转化仍存在诸多障碍[1],主要体现在血管流量、时间分辨率、信噪比及运动等方面的限制,以及缺乏金标准、探针几何形状、后处理算法、血管网络及缺乏三维重建等。显示血管结构需要较长时间为其主要缺陷之一,且长时间扫描不可避免会因生理或外部运动导致图像质量显著下降;注入微泡浓度是另一主要问题,系统地经血管给药使临床很难真正控制靶区微泡浓度。DL或将有助于克服上述挑战,但尚需进一步评估。相信不久新型超声扫描仪将可映射整个器官的三维微血管,使诊断更加精确,并减轻操作者依赖性。
猜你喜欢
化工学报(2021年8期)2021-08-31
昆明医科大学学报(2021年3期)2021-07-22
世界最新医学信息文摘(2021年12期)2021-06-09
昆明医科大学学报(2021年2期)2021-03-29
数学物理学报(2019年3期)2019-07-23
武汉工程大学学报(2018年6期)2019-01-02
家庭影院技术(2018年9期)2018-11-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
中国病理生理杂志(2015年8期)2015-12-21