
我国汽车制动系统技术发展趋势的探讨
2021-12-24 02:45张鹏飞吴希玲王晓亮
专用汽车 2021年12期
张鹏飞 吴希玲 王晓亮



中图分类号:U461.3 文献标识码:A 文章编号:1004-0226(2021)12-0064-04
自从汽车诞生以来,制动系统成为保障汽车安全驾驶最重要的一项主动安全系统。制动系统的工作原理是通过固定件(制动钳或制动蹄)与运动件(制动盘或制动鼓)相互摩擦,进而阻止车轮转动。
制动系统的输入控制可分为行车制动和驻车制动,目前制动控制从机械制动、液压制动转化升级为以电子电器架构为主,制动系统发展方向趋于电子化、智能化,制动执行机构制动器发展趋于轻量化。一直以来,汽车工程师在汽车制动升级研究中倾注了大量心血,不仅体现在优化结构上,更着重对制动控制的理论和方法进行深挖,以便提升汽车的行驶安全性和稳定性。
1行车制动系发展进程
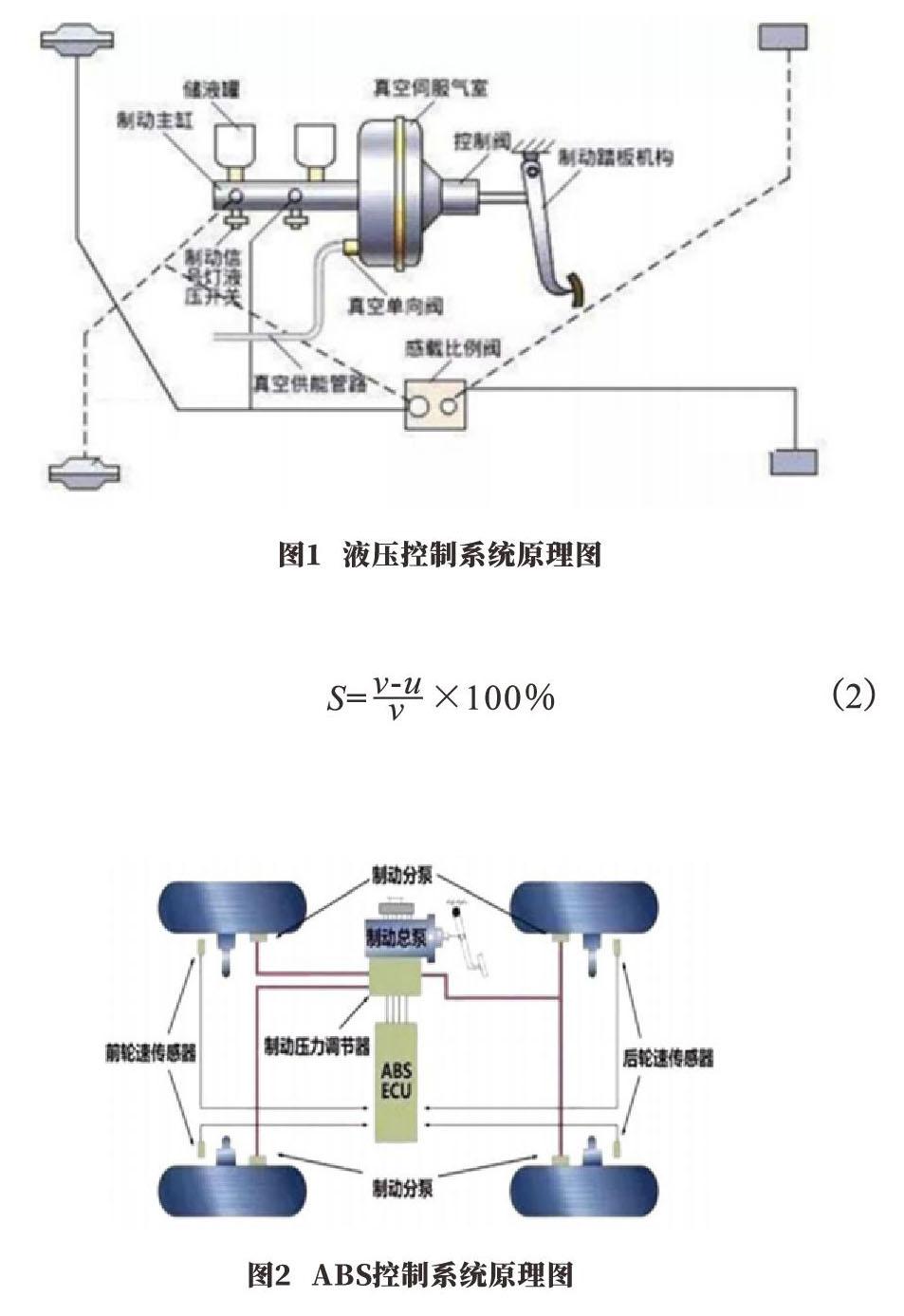
汽车在行驶过程中,采用行车制动(刹车踏板)进而使汽车减速停车。液压制动仍是目前最可靠、最经济的制动形式,且在轻型车中广泛使用。液压制动以帕斯卡定律为原理,驾驶员通过踩下制动踏板,踏板力传递给与制动踏板相连推杆后的真空助力器上,通过真空助力器放大踏板力,推动制动主缸活塞运动,制动液被等量送往各个制动器,制动液推动活塞使制动器夹紧制动盘产生摩擦力,进而控制汽车减速直至停车。相关公式如下:
式中,F、F是活塞所受压力,N;S、S是活塞受力面积,m。
液压控制系统原理图如图1所示。
20世纪80年代,伴随电子技术发展,防抱死制动系统集成加入行车制动系。ABS控制器依据ECU指令调节制动力,进而保持滑移率在20%左右,以保证车轮与路面有良好的纵向、侧向附着力,防止汽车在制动过程中侧滑、甩尾、失去转向能力等现象发生。ABS控制系统原理图如图2所示。滑移率的公式如下:
式中,v代表车速,km/h;u代表车轮速度,km/h。
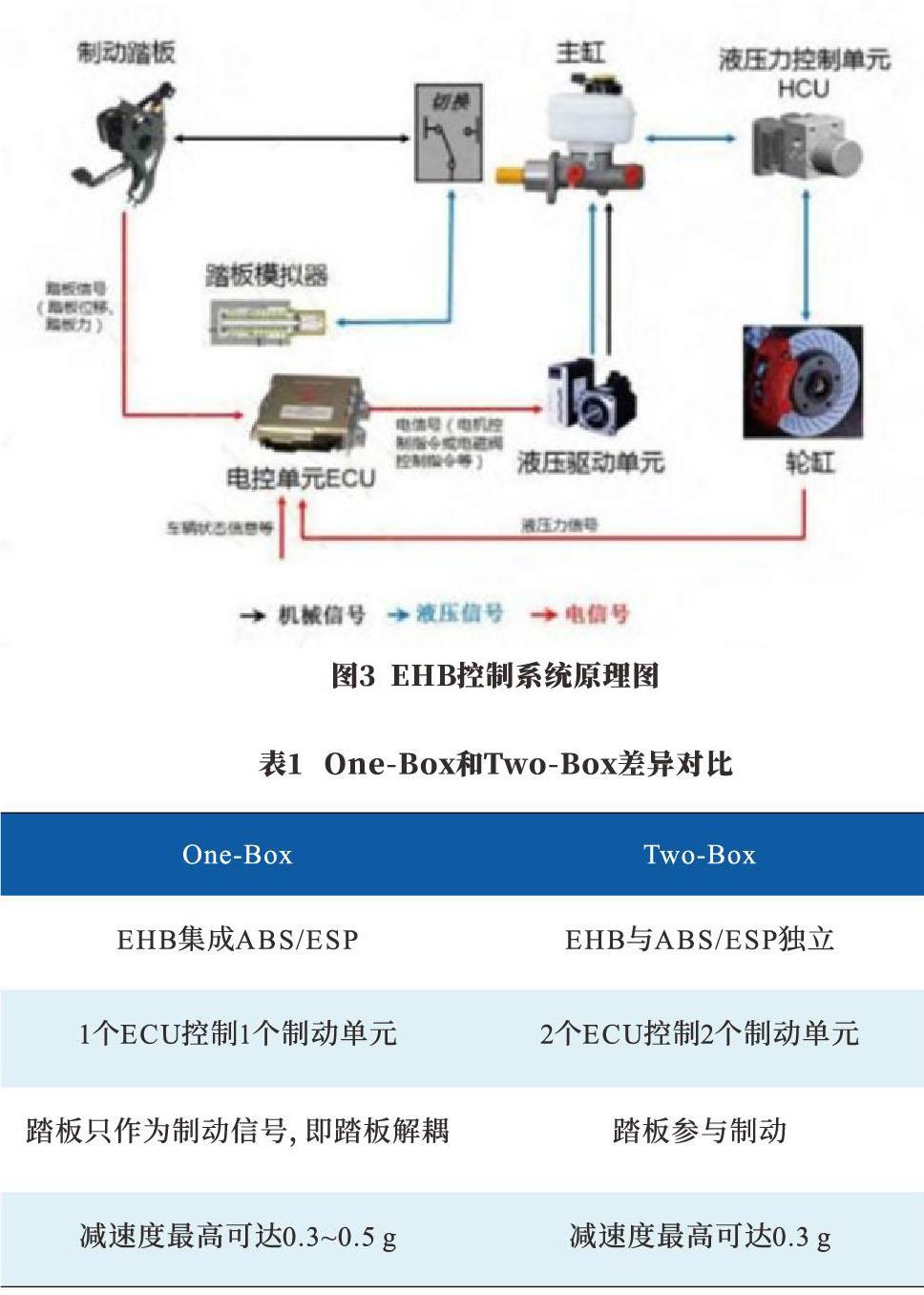
由于新能源车无内燃机产生真空,为解决液压制动系统中的真空助力问题,电子液压制动EHB普及应用到新能源汽车上。EHB控制系统原理图如图3所示,集成踏板位移传感器、踏板感觉模拟器精准感知驾驶员控制制动踏板的轻重缓急,转化为电信号传递给电子控制单元,根据不同工况调节车轮的制动压力。与传统真空助力制动系统相比,线控电子液压制动系统具有高度集成、提高空间利用率、制动性能与发动机互不干涉等特定,并提高了制动安全性。
目前EHB技术路线主要分为One-Box和Two-Box,出于安全方面的考虑,Two-Box市场占有率较高,主要差异见表1。
电子液压制动EHB的发展为电子机械制动EMB打下基础,EMB完全实现了电子化,并替代了传统的制动液和液压部件,由于制动力矩通过安装在轮胎周围的电机驱动执行机构而产生,因此简化了制动系统的结构,并便于布置、装配和维修,如图4所示。
相比传统制动系统,目前EMB制动系统具有很多优势,如结构简单、反应时间短、相对环保等。但同样也有诸多亟待解决的问题,如系统供电稳定性、高温下的工作稳定性、电磁干扰,以及高配比的传感器及控制芯片,研发投入及高性能配件导致了成本居高不下,市场份额占比不高。
2驻车制动系发展进程
驻车制动系是为保证车辆在停稳之后,采用手刹或者脚刹,避免车辆溜车。过去主流是机械式驻车制动,目前电子式驻车制动EPB已经广泛应用。
机械式驻车制动由驾驶员拉动操纵杆发生作用力,驻车拉索放大作用力,拉索推动活塞制动块夹紧制动盘。
EPB是由电子信号替代人力拉动操纵杆,驾驶员通过按下驻车按钮,开关发送驻车电信号给ECU,由ECU发送电信号给电机推动卡钳活塞夹紧制动盘。
3汽车线控制动发展趋势
目前汽车的制动系统趋向轻量化、模块化、集成化、机械电子一体化发展,进而适应自动驾驶的发展。自动驾驶需要把建压时间从300 ms压缩到90 ms左右,因此汽车各个部件的电子化是未来趋势。汽车线控制动就是将驾驶员的操作转化为电信号,通过ECU直接传输给执行机构实施最终操作。线控制动系统要求高可靠性,目前需求冗余备份来保障可靠性。
以电动助力器(EHB)来说,当驱动电机发生故障时,有机械系统来做备份。电机驱动器也需要软件备份及硬件备份。制动工况比较复杂,经常会出现长时间制动、制动过热等现象,对机电系统的过载性能、耐高温性能有较大考验,是目前亟待解决的问题。对电子机械制动EMB来说,没有冗余系统,需保证电源稳定和电子电器之间通信的备份能力。
4制動系统功能安全
由于目前汽车电子电器架构系统复杂且相互融合,电子电器故障及控制软件BUG可能会导致整车发生非预期故障,为保障整车安全在合理范围内,引入功能安全的概念。
与系统相关的风险,在汽车应用中称为汽车安全完整性等级(ASIL),ASIL级别越高,风险越低。2011年发布的ISO 26262《道路车辆功能安全》国际标准是验证汽车电子供应商是否满足ASIL(automotive Safety Integrity Level)要求的重要认证指标,目前我国针对汽车电子电器系统安全的国家推荐标准是GB/T 34590-2017系列。
目前与制动相关的电子电器功能安全大致可分为4类,如表2所示。
制动功能安全通过选取典型工况来试验:驾驶员驾驶测试车辆,加速至预期车速并保持,并让车辆保持在车道中间行驶;正常行驶过程中,测试人员在不提前告知的情况下向系统注入相应故障,导致车辆发生非预期的减速。驾驶员通过控制刹车及转向,尽可能保证车辆方向不偏离车道,以及刹车不会导致追尾等现象发生。
试验过程中,记录汽车相关的安全度量参数,如:减速度、车速、侧向加速度、横摆角速度等,根据数据处理对应安全目标和制动相关安全度量指标量化评级。
对于高级辅助驾驶系统来说,车辆集成大量摄像头及雷达,高级驾驶辅助系统不仅复杂化,且软件算法多样化,功能安全的稳定性的重要度尤为凸显。通常高级驾驶辅助系统核心技术体系分为感知、决策和执行。高级驾驶辅助系统功能安全需求时应该考虑:a.功能正常时操作提示:b.故障发生时,操作提示,如何转化为安全状态;c.功能冗余控制,保证车辆状态安全。
5结语
汽车正在步入“智能化、网联化、共享化、电动化”为代表的“新四化”时代。集成式电子系统未来将更广泛地应用于汽车。随着线控技术下沉至市场,通过市场应用,将不断提升汽车的智能化、舒适化。虽然目前还有关键技术存在局限性,但通过不断完善,将来必定实现高精度、高性能及高安全的汽车电子制动系统。
近年来随着人工智能和5G等信息技术的突破,智能网联汽车是将汽车和信息技术融合发展的领域,它将把多行业成果形成有效协同。随着国家和汽车行业积极推动智能网联汽车运行安全性测试评价体系,完善相关标准,智能网联汽车发展根基将更加牢固。
猜你喜欢
装备维修技术(2020年5期)2020-11-20
汽车与驾驶维修(维修版)(2020年7期)2020-08-14
汽车实用技术(2020年8期)2020-07-09
汽车实用技术(2020年10期)2020-06-11
科学与财富(2018年23期)2018-08-19
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19
汽车之友(2015年8期)2015-06-08
农机使用与维修(2014年5期)2014-09-23
农村百事通(2009年14期)2009-08-04
