电网故障下双馈风力发电机组的控制策略研究
2021-12-24 09:28邓秋玲杨国灵廖宇琦艾文豪朱明浩
湖南工程学院学报(自然科学版) 2021年4期
邓秋玲,杨国灵,廖宇琦,艾文豪,朱明浩
(湖南工程学院 电气与信息工程学院,湘潭 411104)
0 引言
双馈风力发电机(DFIG)系统的功率变换器通过集电环和电刷接在发电机的转子回路,仅对发电机的转差功率进行变换,因此变流器额定功率仅为发电机额定容量的三分之一左右,这是双馈风力发电机的优势;另外,双馈风力发电系统还可以通过矢量控制对发电机输出的有功功率和无功功率进行解耦控制,使系统运行在单位功率因数下,以降低系统的损耗.
然而,正因为双馈风力发电系统变流器容量小的缘故,使它对电网故障相当敏感,也使得它对电网故障的抵御能力比全功率直驱风力发电系统差[1-2].研究表明,当电网电压跌落到一定数值时,如果不采取任何措施,DFIG风力发电系统将会从电网中解列开来.这对风力发电所占比例不高的电力系统来说是可以接受的.然而,对风电渗透较高的电力系统来说,就会造成电网电压和频率的控制难题,更严重的情况是使系统崩溃.
从图1所示的双馈风力发电系统可以看出,发电机的定子直接连接到电网中,当电网出现故障引起电压骤降时会在定子绕组中引起较大的故障电流.通过定子和转子之间的电磁感应作用,会在转子中感应出一个较大的电流.定、转子中过大的电流会导致铁心饱和、磁导率下降、电抗减小,使转子电流进一步增加,引起DFIG电磁转矩剧烈变化,对风力发电机组的冲击很大,有可能损坏机组.另外,当电网出现故障而使电压下降时,由于变流器中电力电子器件的热容量有限,必须对变流器输出电流进行限制,因此在变流器的保护作用下输出电流不会增大,使得输送到电网的功率减小,剩下的能量给直流母线的电容充电,从而直流母线电压增加过快,将导致电容有损坏的风险.
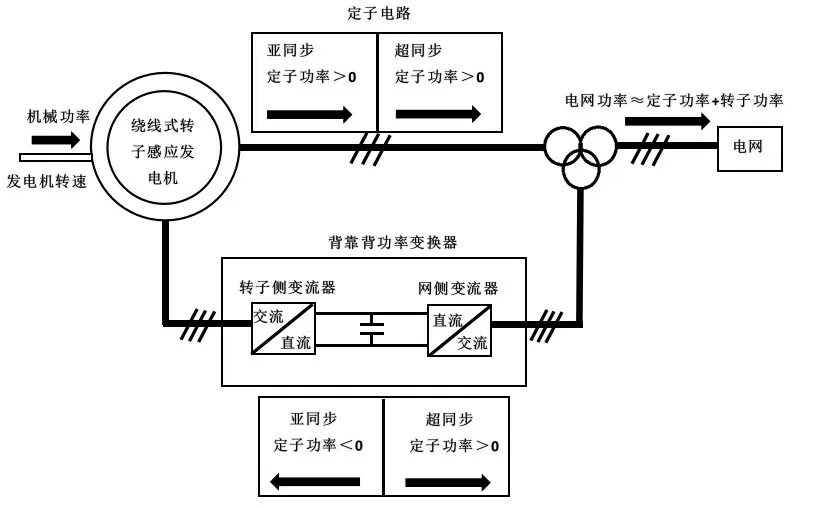
图1 变速恒频双馈感应发电机系统原理图
当电网电压骤降时,DFIG控制策略的主要目标是对转子过电流、直流母线过电压以及电磁转矩振荡的有效控制[1].通常采取的解决方法有两种:一是在电网发生故障引起输送到电网的功率减小时,立即改变风电机组的控制策略,使风力发电机输出的功率减少.即可以采用风力机变桨距以降低风力发电机捕获的能量来使系统功率获得平衡.二是采用Crowbar保护电路来消耗吸收剩余的能量或采用储能装置来储存剩余的能量[2].但增加储能装置和辅助变流器将会增加系统的成本,况且电网故障持续的时间不长,因此常采用Crowbar保护电路.
本文首先介绍桨距角控制方案,然后研究电网故障下的Crowbar保护电路,最后对故障期间和故障后的电网电压支持控制策略进行研究.
1 电网故障下的风轮控制系统的结构
DFIG在电网出现故障情况下运行的控制目标[3-4]包括以下几个方面:(1)保持电网故障期间不脱网运行,以防发电机从电网解列引发弱电网产生更大的后续故障;(2)电网故障出现低电压时,快速向电网提供无功功率,以帮助电网电压快速恢复,避免电网电压崩溃;(3)消耗吸收产生故障时的剩余能量,保证功率变换器和直流母线电容安全可靠;(4)将故障期间电磁转矩的瞬态值控制在转轴和齿轮箱可承受的范围之内(约2~2.5倍额定转矩);(5)抑制转速增加,防止飞车事故.
DFIG风轮机组在电网故障下的控制和保护结构主要包括桨距角控制系统与DFIG在电网故障期间的保护和控制系统[5],如图2所示.

图2 电网故障下DFIG风轮的保护和控制框图
2 桨距角控制
当电网电压发生故障跌落时,双馈风力发电系统网侧变流器输送到电网的功率将降低,如果机侧不采取相应的措施限制发电机的输出功率,则会使直流母线两端的功率不平衡,将会导致双馈发电机的转速快速上升,此时可采用增大风轮机的桨距角,即采用变桨距控制来使风电机组输出的功率减小,从而达到阻止风电机组转速上升的目的,典型的变桨距角控制方案如图3所示.在电网正常的条件下,按照最大功率点跟踪控制策略,由风速Vwind来调节桨距角θ;当系统检测到电网跌落故障时,马上采取变桨距控制策略,此时应根据故障时设定的极限功率,利用系数Cp_lim来估算风能,然后查表选定桨距角的设定值,则可以通过限定风力发电机组的输出功率Pwind来平衡故障下网侧变流器输出功率的下降.

图3 桨距角控制
由于桨距角可以直接控制发电机速度,无论在正常运行时还是在电网故障时都能够防止发电机过速.不同的是,在电网正常时,变桨距机构可由电网提供电力来工作,而在电压跌落后,则需要采用备用电源供电,进一步增加了成本和复杂程度[7].这种方法受变桨执行机构等因素限制,响应速度较慢.
3 电网故障下双馈风电机组的保护与控制
3.1 电网故障下DFIG风轮的保护系统
变流器只是对发电机的转差功率进行控制,在电网故障期间,将很快达到其极限值,因而不能继续对发电机的功率进行控制,结果使得电网故障期间转子电压和电流都增大.在电网电压降落时,网侧变流器(GSC)不能将功率从网侧变流器进一步输送到电网,因此,多余的能量给直流母线电容器充电,直流母线电压将会升高得很快.
为了限制过大的发电机电流和通过RSC流向直流母线的不可控制的能量流动,DFIG变流器必须有一个合适的保护系统.一个简单的方法是通过滑环将一外部转子阻抗——Crowbar装置连接到发电机转子使转子回路短路[6],如图2所示,其作用是限制转子电流和保护变流器.保护系统、监视不同的信号,如转子电流和直流母线电压;当其中有一个被监测的信号超过各自的继电器设定值时,保护系统被激活.
当Crowbar被触发,转子通过Crowbar短路,RSC控制失去作用,因此DFIG就像是一个串了转子电阻的鼠笼感应发电机(SCIG),RSC控制的失效导致在故障检测期间,失去了对有功和无功功率的独立控制性.这意味着:在正常运行时发电机的励磁是通过RSC在转子电路里完成,在出现故障时,必须通过电网在定子中完成励磁.
电网出现故障时,在发电机定、转子中产生大的瞬态电流.当检测到电网故障时,转子通过Crowbar短路,能量消耗在Crowbar装置中.因为网侧变流器(GSC)不是直接连接到发电机绕组,而是连接在电网侧,在电网故障期间它作为一个STATCOM去产生无功功率,帮助电网恢复电压到额定值.当电网电压恢复到一定值时,根据附加的指标,如电网电压的幅值,移去Crowbar保护.当Crowbar电路移去后,RSC又恢复原来的功能,即又能单独控制有功和无功功率.
在发生故障时,Crowbar对转子电流和电磁转矩都有一个有效的阻尼作用.阻值越大,转子电流衰减越快,电流、转矩振荡幅值也越小.但如果Crowbar电阻太大,当把Crowbar移去时,会导致RSC中的功率开关上产生过电压,还会使得直流母线电压振荡幅值增加[1,6].因 此,必 须 正 确 选 择Crowbar电阻的值.目前的研究发现Crowbar电阻的值为0.5~0.8 p.u.是比较恰当的选择[7].
3.2 电网故障期间的DFIG控制系统
在正常运行模式下,转子侧变流器控制转子的电流和发电机的转速,对电网的有功和无功功率进行解耦控制,然而不管转子功率的大小和方向如何,GSC必须保持直流母线电压恒定,确保变流器运行在单位功率因数(零无功功率)下[8].转子侧变流器RSC和网侧变流器GSC的控制都是采用两级控制器来实现,第一级控制采用电流控制器,第二级控制则采用功率控制器,第二级控制器的输出为第一级控制器提供转子电流参考值,如图4所示.

图4 正常运行时DFIG的控制结构图
电网故障期间的DFIG控制是在DFIG正常运行控制结构的基础上进行扩展而建立的.第二级功率控制器中的有功和无功功率参考值的设定取决于风电机组的运行状态,即运行在正常工作模式或是运行在故障运行模式.例如,在正常运行时,RSC的有功功率参考点P由最大功率跟踪点(MPPT)查表得到,对于每个风轮速度,只有一个发电机速度导致最大气动效率Cp.如果电网出现故障,发电机速度变化不是由于风速的改变而是由于电气转矩减小,则此时的有功功率设置点P必须与正常运行时不同,即将P定义为阻尼控制器的输出.阻尼控制器的设计是用来抑制振荡的,因为电网故障将在机械驱动链中产生扭转振荡.当检测到有故障发生时,阻尼控制器就会起作用.有功功率参考点P将会在正常运行(即MPPT)时的设定值和故障运行(阻尼控制器)时的设定值之间进行切换,如图5所示.
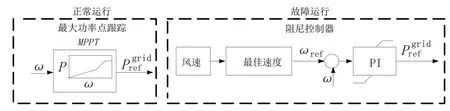
图5 正常和故障运行时有功设置点确定
RSC的无功功率参考点Q根据无功功率的需求而设为某一个值或零.在正常运行时,为了实现单位功率因数运行,GSC只与电网交换有功功率,无无功功率交换,即Q=0.因此,从DFIG传输到电网的无功功率只通过定子.
分析风电系统在严重干扰下的稳态响应时,使用两质量机械模型可以使风轮在电网故障期间得到更精确的响应,以便更精确地预测电网故障对电力系统的影响[5].用一个大质量的模块对应于风轮机转子惯量Jrot,而另一个模块等效于发电机转子惯量Jgen.
风轮的低速轴和高速轴的运动方程分别为:

Tmec=Tshaft/ngear.ngear为齿轮箱的比率.ωrot为风轮机转子的角速度,ωgen为发电机转子的角速度,转子上的气动转矩Tareo作用在驱动轴的一端,而发电机侧的机械转矩Tmec作用在驱动轴的另一端,其合成转矩是轴上的扭矩.在稳态时,所有的转矩是平衡的,即气动转矩Tareo等于风轮机轴上转矩Tshaft,机械转矩Tmec等于电气转矩Tel.
在电网故障时,电气转矩显著地减小,因此驱动系统就像是一个松开的扭转弹簧.由于驱动链的这个特性,机械转矩、气动转矩和发电机转速都以自由频率开始振荡.

用k为刚度(韧性)系数,Jeq是驱动链模型等效的转动惯量,由式(4)决定.

由于桨距中存在几个延时机构,桨距控制不能抑制阻尼扭转振荡,只能抑制发电机速度中慢的频率振荡,然而快的发电机速度振荡必须用阻尼控制器来抑制.调节阻尼控制器可有效地抑制电网故障在驱动链中引起的扭转振荡,若没有PI控制器的调节或PI控制器调节不够都可能导致驱动链系统的自激励,并且有可能为了抵抗振荡进行保护而造成跌落的危险.在电网出现故障期间,PI阻尼控制器根据实际运行时发电机的转速与其设定值之间的偏差为RSC控制器获得一个有功功率设定值P,转速信号则根据当时风速的最佳速度曲线来选取,如图5所示.
为了表明阻尼控制器的效果,图6说明了当系统突然受到激励,例如,风速变化1 m/s,阻尼系统对DFIG风轮的阻尼效果.从图中可以看出:没有阻尼系统时,风速变化会激励大的振荡,发电机速度的振幅增加,结果使系统变得不稳定.而使用阻尼系统后这些振荡很快地被抑制了.因此,附加的阻尼系统可以提高DFIG风轮的稳定运行.

图6 阻尼控制器效果
3.3 DFIG风轮的电压支持
电力系统技术规范要求风轮在电网故障期间仍能联网,并且在电网故障期间提供电网电压支持.DFIG的电网电压支持能力不仅取决于注入的无功功率量,也取决于从发电机到与电力系统连接点的线性特性.
在电网故障小(如没有触发Crowbar)或无功功率略有不平衡时,RSC和GSC的功能仍能正常运行.然而在受到严重电网故障时,若要DFIG风轮维持联网,必须根据电力系统操作人员制定的电网规范,设计一个特定的电网支持策略.
在原理上,电网电压可以由转子侧变流器控制,也可以由网侧变流器控制或由两者一起进行控制.为了提高DFIG在电网故障时的电网支持能力,控制策略的设计采用由两个变流器协调工作来提供无功功率[8-11].用RSC作为缺省的无功功率源,而GSC在RSC受阻期间作为一个补充的无功功率源,使之相当于一台同步补偿器(STATCOM)[1,4].当转子电路的过流或直流母线的过压而触发Crowbar时,RSC被阻断,在故障期间最需要RSC起作用的时候,RSC单独控制有功和无功功率的能力也失去了,使得DFIG对电网的支持能力大幅度减小.因此希望当RSC被阻断时,电网电压(无功功率)控制由GSC来接管,GSC就作为STATCOM运行.重新起动RSC,可以按照不同的标准来完成,如电网电压或转子电流的大小.当RSC开始运行,移去Crowbar保护后,又将GSC设置为零,视为无功功率输出.注意:RSC重新起动的时间太短可能会在故障清除时再一次引起变流器的跌落.
为了在电网故障期间提高DFIG电网电压支持能力,在正常运行时的DFIG控制结构中加入了第三级控制.三级控制级中包含3个控制器,分别为阻尼控制器、转子侧变流电压控制器(如图7(b)所示)和网侧无功补偿器.如图7(a)所示,第三个(电压)控制级为故障运行时的第二级控制器提供参考信号.当Crowbar电路保护没有被触发时,RSC电压控制器为RSC提供无功功率参考信号Q.

图7 提高电网电压支持能力的DFIG扩展控制结构
RSC电压控制器根据公共连接点的实际电网电压U与它的参考值U的偏差,为RSC的第二级控制器提供无功功率参考信号Q.
为了评估RSC控制器的性能,用一个无功功率sink连接到DFIG风轮的高电压端来进行仿真.图8分别表示在有或没有RSC电压控制器的情况下,DFIG风轮机组在公共连接点处的电压、无功功率和有功功率.
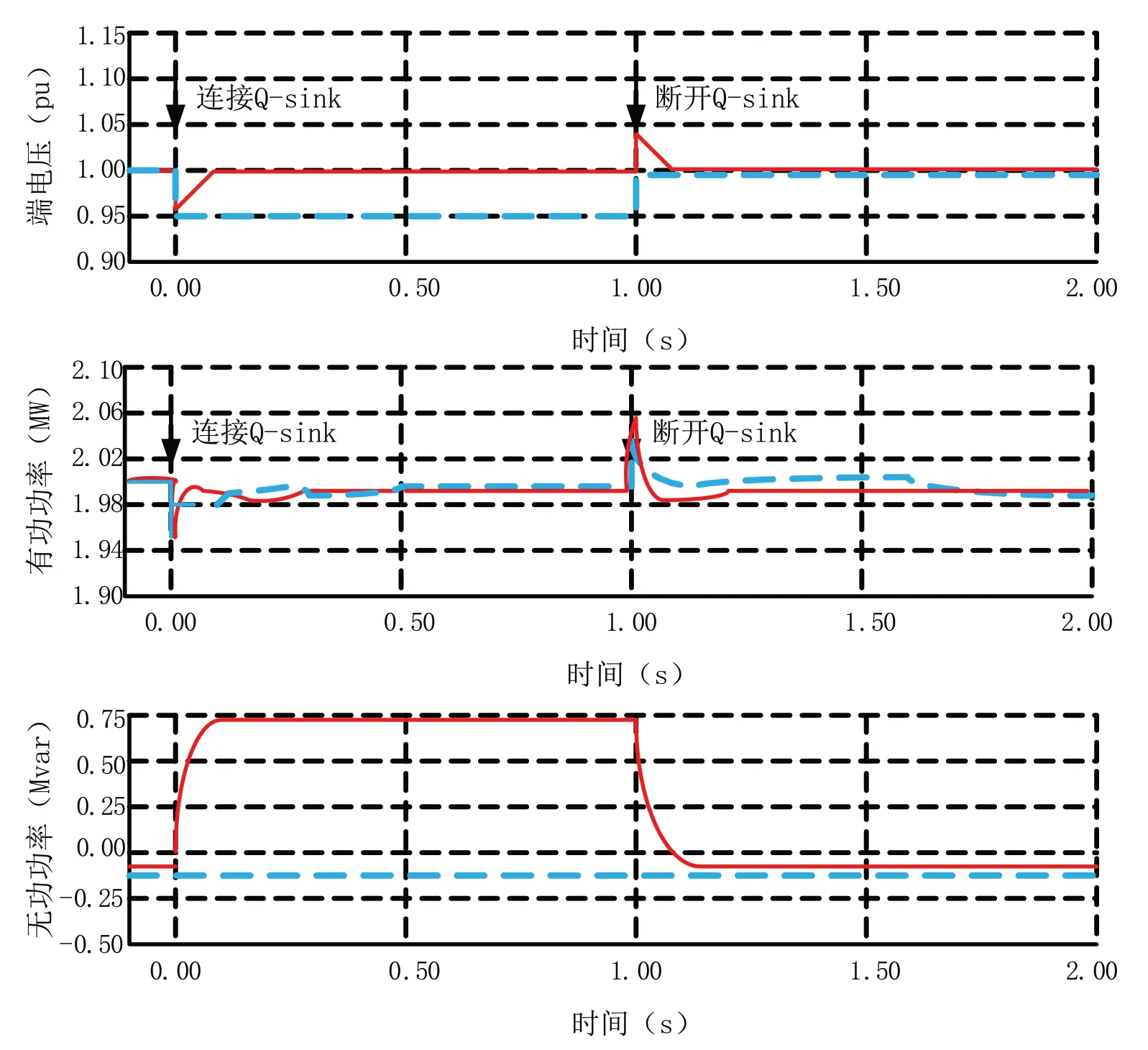
图8 RSC电压控制器性能(从上到下分别为:端电压;有功功率;无功功率)
在无功功率sink连接的瞬间电压跌落大约4%(产生一个不足以使Crowbar电路触发的小的电压跌落).RSC控制器检测到了电压的偏差,命令RSC发出更多的无功功率.在不到10 ms内,DFIG提供的无功功率增加,使电压回到它的额定值(1 p.u.).在1 s后断开sink,在断开无功功率sink的瞬间,电压突然增加,但是RSC电压控制器通过吸收无功功率再一次很快地将电压控制到它的额定值.此时无功功率在连接和断开的过程中分别有一个小的降落/峰值,其他时候基本上是稳定的.在没有RSC电压控制时,电压不能通过无功功率来补偿,只有当无功功率sink断开的时候才会恢复到它的额定值.
一旦RSC被阻断时,GSC无功补偿器(补充的无功功率控制器)为GSC控制产生无功功率参考信号Q,GSC被当作一个STATCOM.当RSC有效时,无功功率补偿器提供零作为无功功率参考值.如果RSC被阻断时,GSC就提供最大无功功率(1 p.u.)作为参考值.这意味着在严重的电网故障下,GSC为支持电网提供最大无功容量,GSC控制还必须保持直流母线电压在一个预先设定的值之上.当端点电压降低时,GSC在电网故障期间的控制容量小于RSC在正常运行时的控制容量.
图9表明在DFIG风轮高电压端出现100 ms三相故障时,GSC无功补偿的效果.在预定的时间,即在Crowbar被触发后200 ms时移去Crowbar保护.在这个仿真中,为了更好地说明在Crowbar连接期间GSC怎样改善电压质量,选择了50%的电压降.
图9对风轮高压端的电压和GSC无功功率的产生进行了说明.GSC补偿的无功功率改善了电网故障期间的电压质量,不仅在故障期间和故障清除期间,也在Crowbar断开后.Crowbar连接会引起无功功率增加,因此将参考值设为1 p.u..当Crowbar电路断开,GSC就被设定为无功功率Q=0,GSC无功功率补偿失效,重新被RSC电压控制所代替.

图9 GSC无功功率补偿效果(从上到下分别为公共点PCC电压和GSC无功功率)
4 结论
本文针对双馈风力发电系统在电网出现故障时可能出现的定、转子电流过大、直流母线电压过高和电磁转矩振荡等问题,分别提出了:采用Crowbar电路来抑制定、转子的过流;采用变桨距控制器来平衡故障时变流器直流母线侧两侧的功率,以维持电流母线电压的稳定;采用阻尼控制器来抑制机械转矩振荡.最后对电网故障期间电压恢复的控制策略进行了研究,提出了增加第三级控制的方法.仿真结果验证了所提出的方案的合理性.
猜你喜欢
防爆电机(2022年2期)2022-04-26
河北农机(2021年12期)2022-01-06
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
科学技术创新(2021年21期)2021-07-30
铁道机车车辆(2021年3期)2021-07-12
能源工程(2021年1期)2021-04-13
太阳能(2019年10期)2019-10-29
电子制作(2019年10期)2019-06-17
中医眼耳鼻喉杂志(2019年2期)2019-04-13