航向姿态参考系统磁航向误差偏大故障分析
2021-12-23 11:31薛永生宋立廷
航空工程进展 2021年6期
薛永生,宋立廷
(1.中国人民解放军海军装备部重大专项装备项目管理中心,北京100071)
(2.海军航空大学青岛校区控制科学与工程系,青岛266041)
0 引 言
飞机姿态和航向是导航中的重要信息参数。航向姿态参考系统(Attitude and Heading Reference System,简称AHRS)是一种可以实时测量载体三轴姿态角信息、地磁场强度等参数的高精度测量仪器,为载体姿态控制提供反馈信息量,属于飞行器捷联惯导中的重要仪器。航向姿态参考系统主要由微机电传感器、通信天线以及结算单元组成。
航向姿态参考系统指示的磁航向对于飞机导航和姿态反馈具有重要作用,该参数出现误差偏大的现象将会影响飞机的飞行安全和执行任务能力,因此对航向姿态参考系统进行误差修正和故障排除在实际工程测试与使用中具有十分重要的意义。
自20 世纪70 年代以来,我国各种飞机和飞行器大都采用了国内自主研发的惯性导航系统。近年来,惯性导航技术发展迅速,导航精度不断提升,哈尔滨工业大学、清华大学等均设计研制了基于微型MEMS 惯性器件的组合导航系统,提出了组合导航算法,提高了系统的导航精度。路小燕针对无人机易受到粗略误差和异常值干扰的特点,采用扩展卡尔曼滤波以及鲁棒Sage-Husa 自适应扩展卡尔曼滤波等方法来提高系统性能;杨雁宇基于低成本MEMS 传感器,分析其误差特性并建立了误差输出模型,提出互补滤波和卡尔曼滤波融合的姿态测量算法;徐鹏针对某型无人机用航向姿态参考系统设计误差修正算法,采用卡尔曼滤波器,对其进行了硬件设计与验证。
本文的研究对象与上述几种结构类似,因此在分析、实践过程中参考了关于AHRS 设计的相关理论。但上述研究更侧重于理论算法的创新或是从系统设计的角度出发,而对于AHRS 在实际工程中的应用研究不够深入,未考虑其在工程中的实用性和可靠性问题。当航向姿态参考系统在工程应用中遇到故障问题时,目前在具体排故时还没有相对体系化的操作规程。姚金彪等对某捷联惯导系统初始对准航向时出现的故障,建立了误差模型,分析了误差的来源,提出了一些应对措施,虽提出了预防手段,但未结合实践检验其有效性。
本文围绕装备使用过程中出现的AHRS 磁航向误差偏大问题进行基本理论分析,采用典型的枚举故障树方法来指导故障定位与排查,对底事件依序进行实验检查,查找故障原因并排除故障。
1 航向姿态参考系统
1.1 系统组成
航向姿态参考系统由航向姿态计算机、磁传感器和GPS 天线构成,具有指示磁航向和姿态解算的功能。可接收大气数据计算机和惯性导航系统的信号,同时向机上其他设备提供磁航向、俯仰角和滚转角信息。
系统交联框图如图1 所示。

图1 航向姿态参考系统交联关系[10]Fig.1 Cross-linking relationship of AHRS[10]
1.2 磁航向计算基本原理
航向姿态参考系统中磁航向计算的基本原理如下:
(1)系统初始对准期间,采用磁传感器输出的磁航向作为系统的磁航向。
(2)初始对准完成后,利用陀螺仪的角速度数据,通过求解航姿微分方程得到捷联磁航向。为了消除陀螺的累积误差,需要采用其他辅助磁航向信息对捷联磁航向进行误差修正,最终得到系统的磁航向。
修正原则如下:
(1)若GPS 信号有效,采用GPS 输出的磁信息对捷联磁航向进行修正;
(2)若GPS 信号无效,采用磁传感器输出的磁航向对捷联磁航向进行修正。
2 具体故障案例分析
2.1 故障现象
在测试过程中,飞行员发现机上航向姿态参考系统输出的磁航向与惯导系统输出的磁航向相比偏差较大,无法满足系统精度要求,且该故障现象并非个例。
2.2 故障树的建立
根据系统组成和磁航向解算原理,建立磁航向误差偏大问题的故障树,如图2 所示。
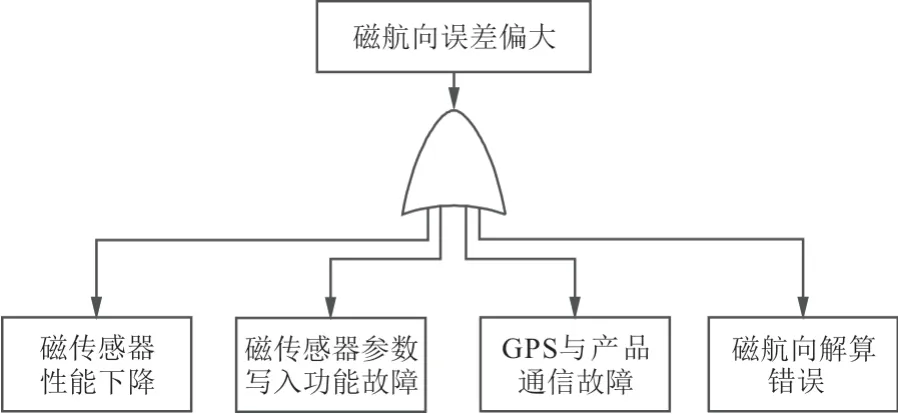
图2 磁航向误差偏大问题故障树Fig.2 Fault tree for large magnetic heading error
2.3 底事件排查和故障定位
依据列举的航姿参考系统磁航向误差偏大问题的故障树(图2),逐一对底事件进行排查。
(1)磁传感器性能下降底事件排查
通过对磁传感器进行测试,验证其产品性能。测试记录如表1 所示。

表1 磁传感器测试记录Table 1 Magnetic sensor test record
从表1 可以看出:在不同姿态角下磁航向角的误差精度均满足相应国军标的技术指标要求,产品硬件性能良好,故排除磁传感器性能下降的可能。
(2)磁传感器参数写入功能故障底事件排查
对磁传感器参数写入功能进行测试,从产品的EEPROM 中读取已写入的磁传感器参数,与罗盘校正软件所记录的该磁传感器参数进行逐一对比,并利用原始的罗盘校正数据复算磁传感器参数。经过对比和复算,写入的参数和参数计算均无误,故可以排除磁传感器参数写入功能故障。
(3)GPS 与产品通信故障底事件排查
对GPS 和产品间的接口通信进行检查,记录某段时间内GPS 输出的原始数据以及产品收到的原始数据,经对比两者完全一致,故排除GPS 与产品通信故障的可能。
(4)磁航向解算错误底事件排查
产品磁航向解算的原理框图如图3 所示,在初始对准时,使用磁传感器的磁航向ψ
作为初值,进入导航阶段后利用内部陀螺仪输出的角速率ω
、ω
、ω
进行积分得到磁航向ψ
″。为消除陀螺累积误差,在GPS 信号有效时使用GPS 磁航迹角信息ψ
′进行修正,最终将修正后的磁航向ψ
输出。
图3 磁航向解算的原理框图Fig.3 Principle block diagram of magnetic heading calculation
飞机各航向的定义如图4 所示。图中:①磁航向角(M
):飞机纵轴在水平面内的投影与地磁北的夹角;②真航向角(T
):飞机纵轴在水平面内的投影与真北的夹角,真航向角=磁航向角-磁差;③航迹角(β
):飞机移动的方向与真北的夹角;④磁航迹角(M
):飞机移动的方向与磁北的夹角;⑤偏流角(α
):偏流角=航迹角-真航向角=磁航迹角-磁航向角。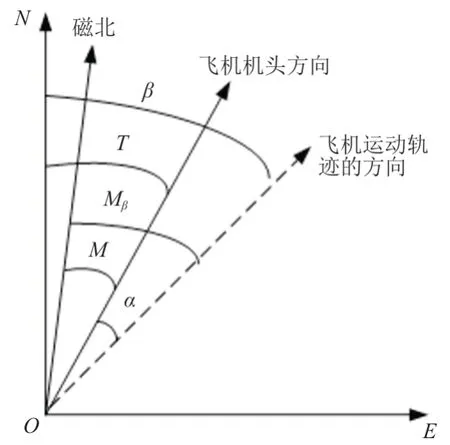
图4 各航向的定义Fig.4 Definition of each heading
根据上述定义,磁航迹角与磁航向角定义不同,两者差值为偏流角。产品把GPS 磁航迹角作为磁航向角基准,对捷联解算的磁航向角进行修正,导致在飞行过程中偏流角较大时,系统磁航向偏差较大。
通过对飞行数据的分析,航向姿态参考系统磁航向与惯导磁航向的偏差,与由惯导测得飞机偏流角大小基本一致。
因此,磁航向误差偏大问题定位为磁航向解算错误,是由于磁航向修正算法原理缺陷导致的。
2.4 纠正措施
由于硬件设备条件的约束,低成本航向姿态参考系统通常采用陀螺仪、GPS 模块和磁力计的组合,利用卡尔曼滤波器融合传感器获取的信息,以获得相对较好的航姿测量结果。针对此故障原理对磁航向解算的算法进行更新,不再采用GPS磁航迹角作为磁航向修正信息,而采用基于卡尔曼滤波的航姿解算方法对磁航向进行计算。
首先选取姿态失准角、速度误差、位置误差、陀螺漂移和加速度计零偏作为状态量,建立系统状态方程;然后选取GPS 的速度和位置信息、大气的真空速以及磁传感器的磁航向作为观测量,利用上述信息与惯性解算对应数据的差值建立量测方程;最后按照卡尔曼滤波的基本过程进行时间更新和量测更新,以完成航姿误差和惯性传感器误差的最优估计和补偿。不同数据源下的组合模式转换原则如下:
(1)GPS 有效时,通过与GPS 组合保证姿态角和航向角的精度,在地面长时间静止需要磁传感器辅助修正航向;
(2)GPS 无效但大气数据有效时,通过与大气数据组合保证姿态角精度,并通过与磁传感器组合保证磁航向角精度;
(3)GPS 和大气数据无效时,利用载机相对稳定飞行状态下的加速度计输出修正姿态角,与磁传感器组合保证磁航向精度。
2.5 测试验证
航向姿态参考系统基于上述措施完成磁航向解算算法的更新后,进行多次测试验证。按照GJB729—1989《惯性导航系统精度评价方法》进行精度评定,姿态误差不大于0.2°(1σ),磁航向误差不大于0.5°(1σ),功能和性能均达到了技术协议的要求,磁航向误差偏大的故障得以排除。
3 结 论
(1)导致航向姿态参考系统的磁航向误差偏大的原因主要有磁传感器性能下降、磁传感器参数写入功能故障、GPS 与产品通信故障、磁航向解算错误。
(2)在采用GPS 信号对惯导输出信号进行磁航向角修正时,需严格区分磁航迹角和磁航向角,否则当飞机偏流角较大时将出现明显的偏差。
(3)本次故障原因定位为磁航向修正解算错误,属于设计环节的问题。通过修改磁航向解算算法排除了此故障,并顺利通过了测试验证。