一种飞行迎角和侧滑角解算方法研究
2021-12-23 11:31温庆
航空工程进展 2021年6期
温庆
(中航通飞华南飞机工业有限公司总体部,珠海519040)
0 引 言
迎角和侧滑角是飞机导航、控制、告警、空气动力特性分析等方面的两个重要参数。因此,获得可靠的飞机迎角、侧滑角对飞行安全至关重要。
获得飞机飞行迎角、侧滑角的方法有很多种,近年来的主要研究方向是嵌入式大气传感器系统,主要用于基于隐身设计的战斗机,技术难度大、成本高。基于无迹卡尔曼滤波的迎角/侧滑角估计方法需要准确的气动模型,在飞机研制阶段是无法实现的。飞行过载解算迎角、侧滑角的方法准确性不高,尤其是在大迎角飞行时。B.Martos 等设计了一种低成本的基于差压的攻角数据采集系统,但是需要首先确定合理准确的飞机升力曲线。迎角/侧滑角传感器测量是最可靠、简便的方法。迎角传感器(侧滑角传感器)也是测量飞行迎角、侧滑角的重要设备,早在 1958 年,W.Gracey总结了常用的迎角、侧滑角测量方法,提出了迎角传感器的使用优势和应用前景。直到现在,迎角传感器仍广泛应用于各种飞机型号,包括 B1 轰炸机、C5、C17 等军用运输机和A320、B737、C919、MA700 等民用客机。
迎角传感器主要由风标叶片、转轴和电位计组成,风标叶片置于机体外,通过风标的转动角度测量安装位置的气流偏角,再分析安装位置的气流偏角与飞行迎角的关系,进而获得飞机的真实迎角;侧滑角传感器测量方法与之类似。对于大多数民用航空器,如 ARJ-100、C919、B737 等飞机,机身外形简单光滑,可以找到一个合适的迎角传感器安装位置,在该安装位置,迎角传感器的测量值不受侧滑角的影响,或影响很小。
对于水陆两栖飞机,由于受到机身下部的船体影响,很难找到不受侧滑角影响的安装位置。本文利用机身迎角传感器的测量值受侧滑角影响这一特性,以风洞试验结果为基础,构造一种迎角、侧滑角同时解算的流程,根据实际情况完善在大侧滑角时的二次修正,并在某大型水陆两栖飞机上开展应用,测量机身两侧迎角传感器的迎角信号受机身迎角、侧滑角的影响规律,并给出根据试验结果反算迎角、侧滑角的流程。
1 风洞试验方法
1.1 试验模型
飞机的迎角传感器对称地布置在机身两侧,通过迎角传感器的风标感受安装位置的气流角度。进行风洞试验的主要目的是测试机身两侧的迎角传感器的测量值随飞机迎角、侧滑角的变化规律。试验在中国空气动力研究与发展中心低速所的FL-12 风洞进行,试验模型在风洞中的安装如图1 所示。

图1 风洞试验模型Fig.1 The model of wind tunnel test
民用飞机专用的迎角传感器尺寸很小,风标高度仅为85 mm 左右,模型缩比太小,缩比风标容易淹没在机身的附面层内,影响试验结果,在4 m量级风洞进行迎角传感器试验宜采用机头模型。风洞试验模型采用某大型水陆两栖飞机局部机身模型,尾部进行收缩整流。采用局部机身模型可以加大试验件尺寸,但无法模拟机翼的上洗影响,需要在后期采用CFD 等手段进行上洗修正。试验模型主要由机头段、尾部整流段以及迎角传感器构成。模型比例为1∶6.3,为全金属模型,支撑方式采用常规叉形支杆腹撑方式。
迎角传感器对称地安装在机身两侧,为大气数据系统提供2 路迎角参数。迎角传感器为风标叶片式传感器,旋转式风标有跟踪气流方向的能力。风标的偏转通过齿轮传动带动RVDT 轴旋转,并以电压的形式输出。该输出电压的大小与风标叶片的偏角成正比;输出电压的相位与迎角的正负相对应。迎角传感器中的阻尼器通过齿轮传动将阻尼力矩作用于旋转部件,以减小风标的颤抖。迎角传感器风标外形如图2 所示,其在机身上的安装位置如图3 所示。
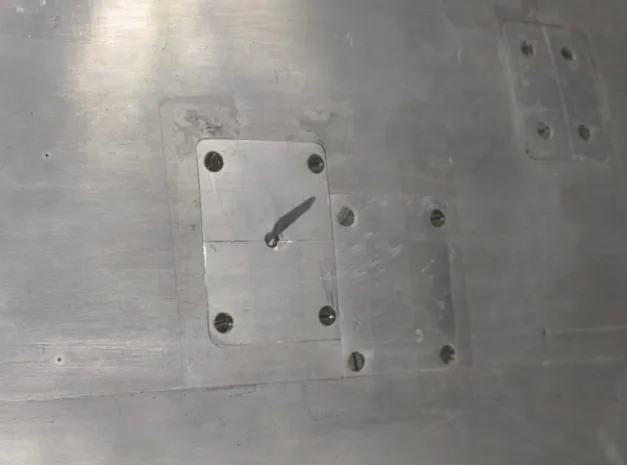
图2 迎角传感器Fig.2 Angle of attack sensor

图3 迎角传感器的安装位置Fig.3 Position of the angle of attack sensor
1.2 试验结果
风洞试验按照固定侧滑角,变迎角的方式进行。试验侧滑角 0°~20°,间隔 5°;试验迎角-5°~25°,间隔2°。左右两侧迎角传感器的迎角测量值与试验迎角、侧滑角的关系曲线如图4~图5 所示,其中横坐标表示模型的试验迎角,即飞行迎角;纵坐标分别为左右两侧迎角传感器的迎角测量值;β
为模型的试验侧滑角,即飞行侧滑角。
图4 左侧迎角试验结果Fig.4 Test results of the left angle of attack

图5 右侧迎角试验结果Fig.5 Test results of the right angle of attack
从图4~图5 可以看出:①机身左右两侧迎角传感器的测量值随迎角的增加而增加;②带侧滑角以后,机身迎风一侧的迎角传感器的测量值有所增加,背风面一侧有所减小;③侧滑角超过15°以后,机身背风一侧产生气流分离,在迎角10°左右分离气流经过迎角传感器,测量值出现非线性现象。
2 解算方案
试验模型的左右迎角传感器测量值的平均值与试验迎角的关系曲线如图6 所示。
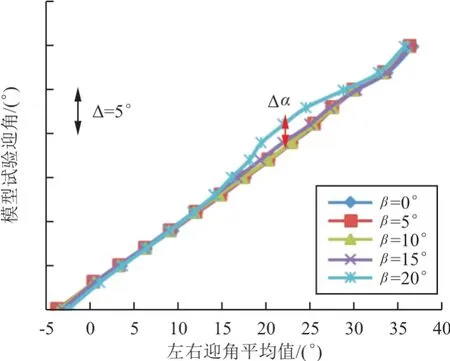
图6 左右迎角测量值的平均值与模型迎角的关系曲线Fig.6 The left and right average value v.s. the model angle of attack
尽管机身左右两侧的迎角传感器测量值受侧滑角影响,但是直到侧滑角15°,两侧的平均值受侧滑角的影响较小。根据《运输类飞机适航标准》(CCAR-25-R4)第 25.237 条风速 a(1)要求:“应制定在干跑道上对起飞和着陆演示是安全的90°侧风分量,该分量必须至少为20 节或0.2VSRO(取大者,但不必超过 25 节)。”按照 0.2VSRO 计算,侧滑角为 11.31°;按照 20 节计算,侧滑角为15.12°。因此,在飞行包线范围内,机身左右两侧的迎角传感器测量值的平均值与飞行迎角线性相关且不受侧滑角影响。即使飞行侧滑角超过15°也可以根据侧滑角进行迎角修正,消除大侧滑角引起的迎角误差。


α
,15°~20°侧滑角线性插值计算。机身左右两侧的迎角传感器的测量值差距随着侧滑角增加而加大,因此可以利用此特点计算飞机的飞行侧滑角。飞机不同侧滑角时左右两侧的差值与平均值的关系曲线如图7 所示。在已知左右迎角平均值的条件下,根据图7 可以计算出不同侧滑角时的左右两侧的差值,即侧滑角和左右差值曲线,该曲线是单调的,根据实际测量得到的左右侧滑角差值,可以插值出实际的飞行侧滑角。

图7 左右差值与均值的关系曲线Fig.7 The left and right difference v.s. the mean value
在飞机上实现的迎角/侧滑角解算流程如下:
(1)采集机身左右两侧迎角传感器的测量值;
(2)计算左右两侧迎角传感器的平均值和差值;
(3)根据平均值和差值按照图7 计算侧滑角;
(5)侧滑角大于15°时,根据图6 对飞行迎角进行侧滑修正。
3 飞行试验验证
3.1 迎角验证
迎角的空中校准方法可分为两种,一种方法为静姿态法,是较为常用的方法,例如利用姿态陀螺平台或惯性导航系统等高精度的测量设备;第二种方法是依靠精确测量的过载、角速度等参数,利用参数辨识的方法解飞机的运动方程。由于飞机目前处于调整试飞阶段,飞行架次较少,还未正式进行迎角校准,故采用静姿态角法初步验证迎角解算方案的准确性。在飞机重心位置加装一台静姿态角传感器,飞机稳定平飞时,静姿态角传感器的测量值被认为是真实迎角。
飞机平飞时姿态角与迎角数据对比如图8 所示,可以看出:飞机飞行迎角测量值与飞行迎角的斜率接近1.0,偏移量约0.15°,表明飞行迎角的测量值准确度较高。

图8 平飞姿态角与风标解算迎角关系Fig.8 The level flight attitude angle v.s. the angle of attack calculated by the weathercock
3.2 侧滑角验证
相对于迎角传感器的校准,大型飞机的侧滑角校准更为复杂。为了验证某水陆两栖飞机采用机身左右两侧迎角传感器的差值解算侧滑角的可行性,在前机身顶部对称面上加装了一个侧滑角传感器。
该侧滑角传感器原理与迎角传感器类似,均为风标叶片式角度传感器。尽管该侧滑角传感器的风标叶片远离机身表面,但是仍旧会受到机身机翼的侧洗影响,使得侧滑角传感器的风标叶片偏度与飞机真实侧滑角有一定的差异。
通过CFD 方法计算了不同迎角、侧滑角状态的侧滑角传感器风标叶片所在区域的气流偏角(即侧滑角传感器测量值φ
)随飞行侧滑角β
的变化规律,计算结果如图9 所示,可以看出:侧滑角传感器所在位置的气流偏角随侧滑角线性变化,且受迎角影响较小,侧滑角传感器位置误差修正简单。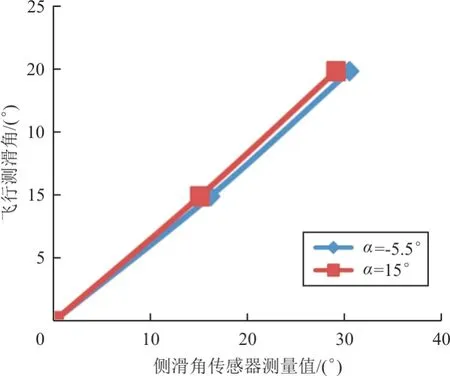
图9 飞行侧滑角与测量值的关系曲线Fig.9 The flight sideslip angle v.s. the measured value
根据计算结果,飞机的侧滑角可按如下线性公式修正:

即侧滑角传感器的测量值乘以0.58 作为飞行侧滑角使用。
迎角对侧滑角传感器的偏度有一定的影响,在计算迎角范围内,经过侧滑修正后,误差不超过1°,因此迎角影响可以忽略。
采用机身左右对称的迎角传感器的差值解算侧滑角和机身对称面的侧滑角传感器测量侧滑角两种途径测量飞机的真实侧滑角,并进行试飞验证。选取有代表性的一段时间内的侧滑角数据,对比结果如图10 所示。

图10 两种侧滑角获得方法试飞对比Fig.10 Flight test comparison of two methods for obtaining sideslip angle
从图10 可以看出:采用机身左右对称的迎角传感器的差值解算侧滑角与侧滑角传感器测量的侧滑角差别不大,表明利用左右迎角差值法解算侧滑角是可行的,只需要在后续试飞中进行一定的试飞校准即可获得准确的飞行侧滑角。
4 结 论
(1)由于机身外形复杂,机身左右两侧的迎角传感器的迎角测量值受侧滑角影响明显,随着侧滑角增加,迎风一侧的迎角值增加,背风一侧的迎角值减小。
(2)机身两侧的迎角传感器测量值的平均值在侧滑角小于15°时受侧滑角影响较小,且与飞行迎角线性相关。
(3)机身两侧的迎角传感器测量值的差值与侧滑角正相关,可以利用此关系通过迎角传感器解算飞行侧滑角。
(4)静姿态角法初步飞行验证表明在飞机平飞时,迎角测量值与飞行姿态角一致。
(5)机身左右两侧的迎角传感器解算的侧滑角与机身对称面的侧滑角传感器测量的侧滑角试飞结果一致。
(6)根据机身两侧的迎角传感器信号解算飞行迎角和侧滑角,解算结果得到了试飞验证,测试精度满足控制系统要求。