
三维激光扫描技术在施工场地土方测量中的应用
2021-12-22 06:38唐铭阳
建筑施工 2021年9期
杨 勃 邵 昀 唐铭阳
中国建筑土木建设有限公司 北京 100070
施工单位进场后的一项重要工作是场地原始地面方格网的测设,目的在于记录原始地貌现状,确定整个场地或局部区域平均标高,为场地平整或基坑开挖土方工程量结算提供客观依据。传统的数据采集基本为基于点的模式,即用全站仪、GPS RTK获取离散点的三维坐标。由于被测量的对象往往是不规则的地形表面,因此,下列问题难以解决[1-5]:
1)地形特征点上必须安置棱镜或GPS接收机,人员无法到达的点位只能放弃。由于网格交点高程依靠双线性内插、多项式内插等方法获得,丢失重要的地形特征点将对计算结果产生较大影响。
2)对于复杂的地形表面,人工采集的数据量有限,难以准确描述。
3)采集什么样的点位依赖于测量人员的主观认识,不同的测量人员的测绘结果可能存在一定差异。
本文介绍一种全新的方法,利用地面三维激光扫描技术,又称“实景复制技术”,采用非接触式对地形表面快速扫描,快速获取海量三维数据,对真实世界进行三维建模和虚拟重现。这种方法极大地降低了人力消耗,提高了作业速度,客观地反映了现实情况,为大面积土方测量提供了新思路。
1 三维激光扫描仪工作原理和特点
1.1 三维激光扫描仪工作原理
三维激光扫描仪的构造主要包括一台高速精确的激光测距仪,以及一组可以引导激光并以均匀角速度扫描的反射棱镜。激光测距仪主动发射激光,同时接受由自然物表面反射的信号从而可以进行测距,针对每一个扫描点可测得测站至扫描点的斜距,再配合扫描的水平和垂直方向角,可以得到每一扫描点与测站的空间相对坐标(图1)。

图1 三角测距原理示意
1.2 三维激光扫描仪的特点
三维激光扫描技术,被誉为测绘领域继GPS技术之后的一次技术革命,也被称为从单点测量进化到面测量的革命性技术突破。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。具有快速性、不接触性、穿透性,实时、动态、主动性,高密度、高精度,数字化、自动化等特性。每秒可轻松、精确获取数万点至数十万点三维坐标点云数据,快速建立物体的三维影像模型。
2 数据采集的主要外业工作及流程
2.1 现场踏勘与站点选取
踏勘现场的目的是全面了解扫描区域范围及高低起伏状况,合理布设扫描站点。扫描仪设站点的选择应顾及效率和精度两方面因素。首先,站点应尽量选在通视条件良好的开阔处,有效扫描面积尽可能大,避免死角以减少设站。同时,站点的选择要考虑仪器的有效扫描距离,相邻站点间扫描对象既不发生漏测也不过度重叠。
2.2 控制点布设
1)采用“测站点+后视点”的数据采集方法时,控制点与扫描设站点重合。
2)采用其他数据采集方法时,控制点不少于3个,且均匀分布在整个测区。虽然布设的控制点数量越多对数据精度越有利,但同时内外业工作量也会增加。
3)点位附近地势平坦,无其他干扰,便于安置全站仪、GPS、水准仪等常规测量仪器。
2.3 站点数据采集
站点上安置激光扫描仪,设定扫描分辨率。当采用标靶进行不同站点点云数据配准时,应使用高分辨率扫描标靶,以确保标靶中心坐标提取精度。标靶应设在相邻站点扫描重叠区域内,标靶数量不少于3个,应避免靶标在一条直线上。
扫描过程中应避免人员走动,减少异常点出现。迁站前应检查数据,确认是否遗漏。
2.4 控制点测量
控制点的平面坐标可以通过全站仪、GPS RTK等方式获得,高程可以采用水准测量、三角高程、GPS拟合水准等方法获取。平面和高程精度应满足图根点点位中误差和高程中误差要求。控制点的野外测量在数据处理之前完成即可。
3 数据处理
3.1 噪声去除
噪声来源有多种。如果以获取地表高程为主要目的,则除了超过有效扫描范围的数据需要剔除外,诸如地表建筑、停放车辆等与土方计算无关以及振动引起的噪声都应去除。
3.2 标靶中心坐标提取
靶标中心坐标是不同站点点云数据配准的依据,对最终成果产生关键性影响。中心坐标的提取通常由仪器专用软件自带的靶标识别功能自动完成。
3.3 多站点云数据配准
与全站仪数据采集不同,地面三维激光扫描获得的点云数据是扫描站点坐标系下的,且各站点坐标系相互独立。为了获得区域内整体数据,就需要以靶标中心为公共点,拼接各站点数据,将所有站点的点云数据统一到一个坐标系上来。
3.4 点云数据简化
地面三维激光扫描仪每秒可获得几万甚至数十万点三维坐标点云数据,这样的海量数据在后期内业处理时要求计算机配置很高。同时,云数据过分密集对土方测量来说也没有必要。因此,需要根据点云数据分布规律进行适当简化。
3.5 坐标转换
工程设计的坐标和高程一般采用城市坐标系和城市高程系。由于配准和简化后的点云数据,其坐标仍然是任意坐标系下,为完成土方计算,还需要将其转换至城市坐标和高程系下。坐标转换的依据是事先布置并用常规测量方法获得的控制点三维坐标。
数据配准和坐标转换与解析空中三角测量非常相似。数据配准相当于相对定向,而坐标转换就是绝对定向。
4 成果检查验收
扫描数据经过坐标转换也就是上面提到的绝对定向后,其质量应经过检验。可预先在场区中央及周边均匀布设一定数量的检查点,用常规测量方法获取三维坐标。从模型上提取这些点的三维坐标并与之比较,从而计算模型精度。
5 工程实例
5.1 任务简介
余姚至温岭公路临海汇溪至沿江段改建工程位于浙江省临海市,设计为一级公路,主要功能是作为台州境内的重要区域干线公路。
项目的里程桩号为K0+000~K37+709.66,根据设计线路走向要求,需要对该线路上的某块场地进行测量并回填处理。该块场地占地面积约28万 m2,受前期施工的影响,测区内大小土堆和取土后留下的土坑遍布,有些甚至难以攀爬。
甲方要求尽快完成原始地面方格网(10 m×10 m)的测设工作,作为土方结算的依据,时间上较为紧迫。
5.2 方案策划
如果采用极坐标法,按要求碎步点间距不宜大于计算要求的网格间距,再加上地形变化处增加的点,整个测区粗略估计需要采集4 000点。不考虑控制测量的时间,如果每天采集400~500点,仅碎步测量的时间就超过一周,从时间上无法满足甲方工期要求。因此决定尝试采用三维激光扫描的方法。
5.3 外业实施
为提高效率,将测量人员分成2个作业组。
第1组负责三维激光扫描。设36个站,使用Riegl VZ400对整个场区进行扫描,每站扫描10 min,确保无死角、无遗漏。
第2组负责控制点、检查点的布设和测量。在场区范围内均匀布设16个控制点(K1~K16),场区周边南侧和西侧布设10个检查点(J1~J10),如图2所示。
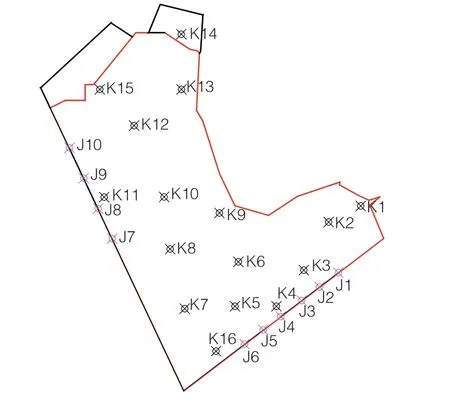
图2 控制点、检查点的设置
用网络RTK测量了K1~K16和J1~J10平面坐标;敷设附合水准线路,用水准仪串测了上述点位高程。
5.4 内业处理
用Riscan Pro 软件,经噪声去除→靶标中心坐标提取→多站点云数据配准→点云数据简化等步骤,获取任意坐标系下整个模型点云数据(图3),并以K1~K16为控制点,将数据转化为城市坐标系下的三维坐标数据。

图3 建立的场地模型示意
5.5 质量检查
用Riscan Pro软件提取J1~J10点位高程,与水准测量得到的各点高程进行比较,求出差值Δ,估算模型点高程精度,见表1。

表1 模型高程与水准高程的数据对比
由表1计算可知,观测中误差m值为8.7 mm,因此可以得出结论:通过三维激光扫描所获得的模型数据完全满足三维坐标数据的精度要求。
6 结语
Riegl VZ400三维激光扫描仪标称精度很高,也经过专家的论证,但为了验证成果质量,本工程中布设了一定数量的检查点。实践证明,用地面三维激光扫描技术进行大面积土方测量,不但提高了工作效率,成果质量也完全能够满足精度要求。该技术能大幅度提升测量效率,为工程进度提供有力保障,故随着时间的推移和认识的提高,这种技术在施工测量领域将有广阔的应用前景。
猜你喜欢
建材发展导向(2022年4期)2022-03-16
模具制造(2019年3期)2019-06-06
测绘工程(2018年3期)2018-03-20
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
全球定位系统(2015年4期)2015-02-28
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
测绘学报(2014年7期)2014-01-14
现代营销·经营版(2013年5期)2013-05-14
