
基于ADAMS的拨禾轮建模及仿真研究①
2021-12-21 02:14司马勇陈黎卿
佳木斯大学学报(自然科学版) 2021年6期
刘 凡,肖 平,*,司马勇,陈黎卿
(1. 安徽工程大学机械工程学院,安徽 芜湖 241000;2. 保隆(安徽)汽车配件有限公司,安徽 宣城 242000;3. 安徽农业大学工学院,安徽 合肥 230061)
0 引 言
拨禾轮是联合收割机割台的主要工作总成之一,也是收割机最先接触农作的部件,其功能是扶压农作物,把待割农作物的茎秆扶正喂入割台,有利于切割器切割农作物,在农业生产中对不同的收割情况,其拨禾轮自转速度和收割机前进速度的比值也是不同的,控制好其运动轨迹,对收获效率有着显著影响。因而对在联合收割机部件中最先接触农作物的拨禾轮作为研究对象,进行建立数学模型,利用虚拟样机技术对其进行运动学仿真分析,从而为减少收割环节时农作物的损失率,提供理论依据。
1 拨禾轮数学模型
1.1 拨禾轮安装高度模型
拨禾轮在工作时,其滚动前进运动会对农作物造成打击,造成谷物脱落,但当其接触农作物时,弹齿的相对运动方向与地面垂直时,可以将在此收割环节的损失降到最低。要满足上述的要求,拨禾轮的高度为:
(1)
式中,H为拨禾轮中心轴与主切割器的垂直距离,L为作物高度,R为拨禾轮半径,λ为拨禾轮速比,I为拨禾轮弹齿的长度,h为主切割器与水平地面的垂直距离[1]。
为了防止拨禾轮在转动时,弹齿将茎秆卷带飞出割台,不能起到拨禾作用,让割刀切割农作物,H还要保证弹齿在转动到垂直于地面方向的最低位置时,其向后推动作用的位置,应在禾秆割取部分的1/3处,所以H为:
(2)
1.2 拨禾轮运动轨迹模型
拨禾轮工作时,联合收割机的水平前进运动和其本身的转动构成了其运动形式。可设拨禾轮中心轴在水平地面的投影为坐标原点,过坐标原点且平行于地面为X轴方向,过坐标原点且垂直于地面为Y轴方向,让弹齿轴上的一点在水平位置处开始顺时针方向转动,那么该点的运动方程可表示为:
(3)
式中,Vm为联合收割机前进速度,t为拨禾轮工作时间,ω为拨禾轮旋转角速度[2]。
对式(3)进行求导可得拨禾轮的水平分速度和竖直分速度为:
(4)

1.3 拨禾轮作用程度模型
拨禾轮在正常工作时,因为转速的不同会对农作物产生碰撞,从而造成收割损失。为了减少拨禾杆对农作物的撞击,拨禾杆进入农作丛时其水平分速度应该为0,即:
Vx=Vm-Rωsinωt1=0
(5)
由公式(5)可得:
(6)
又ΔX是每根拨禾杆的作用范围,即每根拨禾杆在配合切割时每次所扶持的谷物范围为:
ΔX=X1-X2
(7)
由公式(6)可得:
(8)

将(8)代入(4)中可得:
(9)
所以
(10)
设拨禾轮有Z个拨禾杆,所以拨禾杆的余摆线扣环之间的节距为:
(11)
(12)
将(10)代入(12)化简可得:

(13)
η是拨禾杆扶持状态下割台切割农作物的百分数,数值过大会造成收割农作物损失加大,数值过小则工作性能降低,一般拨禾轮的作用程度η达到30%就可以正常工作要求。
1.4 拨禾轮转速模型

(14)
式中,n为拨禾轮转速,D为拨禾轮直径。
2 基于Solid Works和ADAMS的拨禾轮运动学模型
2.1 三维实体建模及简化
为了提高拨禾轮抗倒伏能力,对传统弹齿调节机构进行优化设计,在拨禾杆与弹齿之间增加多层可调铁制薄片机构,从而可以根据谷物倒伏情况调整弹齿高度,提高收获效率。拨禾轮的半径采用通用机型的标准,本文建模的偏心拨禾轮半径为480mm;主轴半径为33mm、长为2772mm;弹齿轴半径为15mm、长为2490mm;弹齿长为212mm、分布间距235mm,数目为10个。模型如图1所示。

1—弹齿;2—弹齿轴;3—拨禾轮主轴;4—可调节铁片;5—偏心辐条;6—偏心副板;7—曲柄连接杆;8—偏心调节板
拨禾轮装配体包含零件过多,若将其全部导入ADAMS软件进行仿真分析,增大模型约束和驱动施加的工作量,也容易发生干涉和仿真报错,为了方便仿真分析,在不影响实验结果的前提下,对模型进行设计简化;模型中所有螺丝、螺母、垫片的作用可以在ADAMS中直接通过施加约束代替,所以将其全部去除;偏心调节板在随后的仿真中,对拨禾轮运动不产生影响,但需要额外施加多余约束和驱动,为方便后期实验仿真也将其删除。
2.2 建立虚拟样机
运用ADAMS 2020软件对其三维模型进行运动学仿真研究。图2(a)是其导入 ADAMS软件中的拨禾轮模型。拨禾轮装配体导入软件后没有任何装配关系,每个零部件都是完全独立的。所以要运用布尔运算以及添加运动副和驱动使模型在ADAMS中形成完整的虚拟样机模型。
分别将五根弹齿轴上的弹齿与弹齿轴,三个主辐板和其对应的主辐条,三个主辐板与拨禾轮主轴,偏心辐板与偏心辐条运用布尔运算合并成一个整体。将五个弹齿轴分别与主辐条连接位置施加旋转副,将五个曲柄连接杆分别与偏心辐条连接位置施加旋转副,在对拨禾轮主轴施加旋转副及移动副,再对拨禾轮主轴施加旋转驱动和平移驱动。为了方便仿真观察其运动形态,将弹齿改为绿色,弹齿轴和曲柄连接杆改为红色,偏心辐板和偏心辐条改为土黄色。图2(b)为添加约束和驱动后的模型。
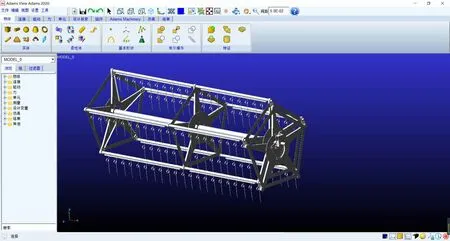
(a)导入ADAMS软件中的拨禾轮
3 仿真实验及结果分析
因为拨禾轮的运动轨迹与拨禾速度比λ有关,所以控制拨禾速度比λ的大小,对拨禾轮运动轨迹进行仿真分析,找到λ与运动轨迹之间的映射关系。仿真时取弹齿末端尖点作为运动轨迹观察对象。
(1)当拨禾速度比λ<1时,取拨禾轮圆周线速度为0.9 m/s,水平前进速度为1.5 m/s,此时λ=0.6。弹齿末端运动轨迹,水平位移曲线和水平分速度曲线分别为图3,4,5所示。

图3 λ <1时弹齿末端运动轨迹
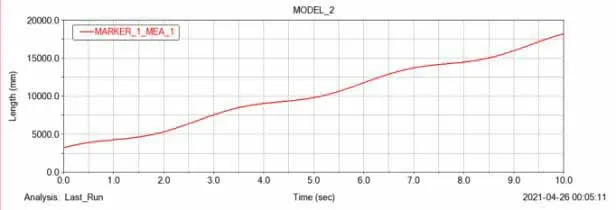
图4 λ <1时弹齿末端水平位移曲线
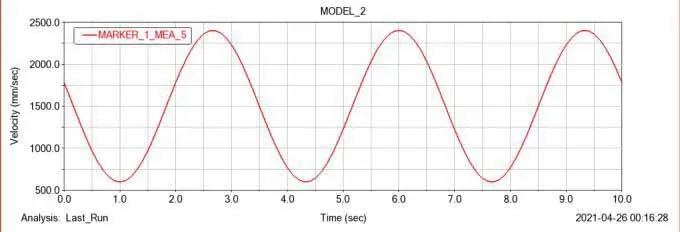
图5 λ<1时弹齿末端水平分速度曲线
当拨禾速度比λ<1时,弹齿末端的运动轨迹为短幅摆线,没有扣环。弹齿速度依然为正值,没有向后的水平分速度,所以也不会将农作物喂入割台中去。弹齿的水平位移曲线都呈现平稳增长,所以也都不起拨禾作用。
(2)当拨禾速度比λ=1时,取拨禾轮圆周线速度为0.9 m/s,水平前进速度为0.9m/s,此时λ=1。弹齿末端运动轨迹,水平位移曲线和水平分速度曲线分别为图6,7,8所示。

图6 λ=1时弹齿末端运动轨迹

图7 λ=1时弹齿末端水平位移曲线
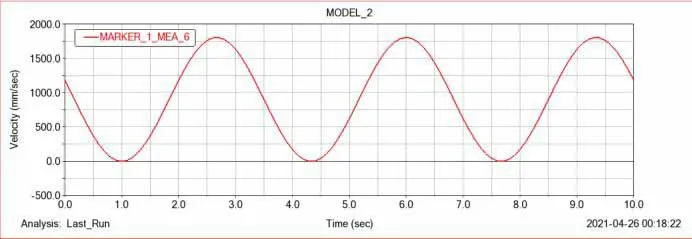
图8 λ=1时弹齿末端水平分速度曲线
当拨禾速度比λ=1时,弹齿末端的运动轨迹为普通平摆线,也没有扣环。弹齿在任意一点的运动轨迹依然没有水平向后的分速度,所以也不会将农作物喂入割台中去,对农作物的扶持向后输送的作用非常有限。弹齿的位移曲线上升波动不够明显,拨禾能力几乎没有。
(3)当拨禾速度比λ>1时,取拨禾轮圆周线速度为0.9 m/s,水平前进速度为0.5m/s,此时λ=1.8。弹齿末端运动轨迹,水平位移曲线和水平分速度曲线分别为图9,10,11。
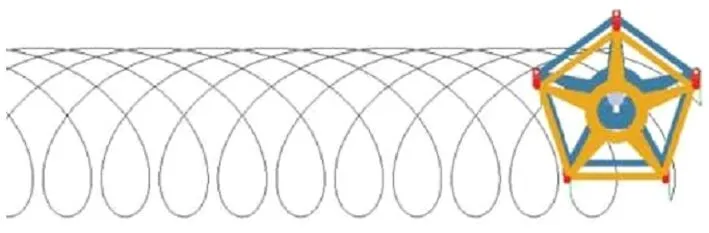
图9 λ=1.8时弹齿末端运动轨迹
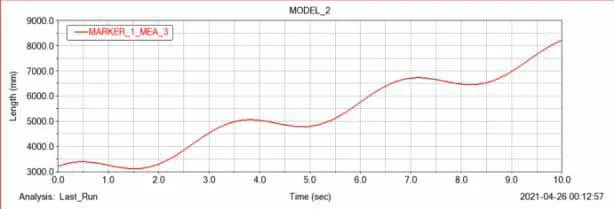
图10 λ=1.8时弹齿末端水平位移曲线
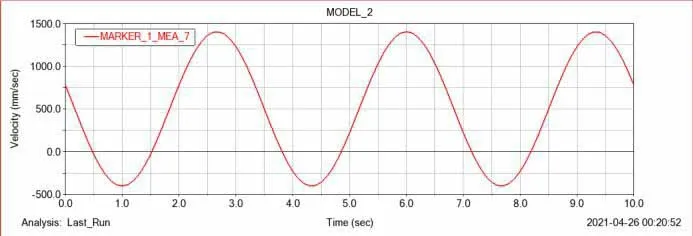
图11 λ=1.8时弹齿末端水平分速度曲线
当拨禾速度比λ=1.8时,弹齿末端的运动轨迹为次摆线,运动轨迹成扣环状,弹齿末端运动到余摆线扣环最大横弦的下方有明显向后位移的趋势,存在显著的对农作物扶持和向后输送作用。弹齿末端有水平向后的速度,可以很好的农作物喂入割台,并且弹齿末端的水平位移曲线有明显波动,都是波浪式的上升曲线,拨禾作用明显。
(4)当拨禾速度比λ>1时,取拨禾轮圆周线速度为0.9 m/s,水平前进速度为0.4m/s,此时λ=2.25。弹齿末端运动轨迹,水平位移曲线和水平分速度曲线为图12,13,14所示。

图12 λ=2.25时弹齿末端运动轨迹
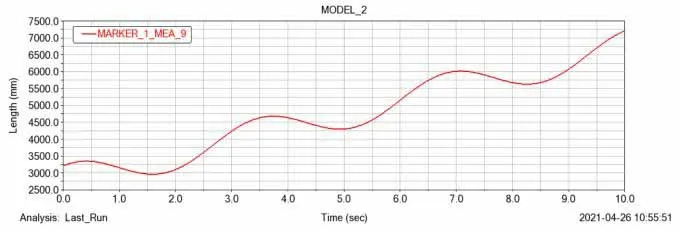
图13 λ=2.25时弹齿末端水平位移曲线

图14 λ=2.25时弹齿末端水平分速度曲线
当拨禾速度比λ=2.25时,弹齿水平位移曲线依然为波浪上升趋势,水平分速度也有向后运动趋势,具有拨禾功能。由图12明显看出弹齿的运动轨迹为次摆线,但是次摆线的环扣存在重叠现象,表明同一排部分农作物在拨禾轮工作时,同时遭到不同排的弹齿的碰撞,这样没有提高拨禾功能,还因为弹齿对农作物双重的撞击加大收割损失。
(5)拨禾速度比λ>1时,取拨禾轮圆周线速度为0.9 m/s,水平前进速度为0.465m/s,此时λ≈1.935。弹齿末端运动轨迹,水平位移曲线和水平分速度曲线为图15,16,17所示。
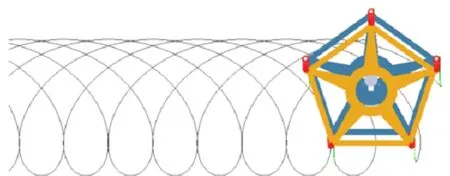
图15 λ≈1.935时弹齿末端运动轨迹

图16 λ≈1.935时弹齿末端水平位移曲线

图17 λ≈1.935时弹齿末端水平分速度曲线
当拨禾速度比λ≈1.935时,由图16,17不难看出弹齿水平位移曲线都明显呈现波浪式上升趋势,水平分速度曲线也都存在负值,其收割机向前移动的同时,每个弹齿和弹齿轴也都呈周期性向后移动,表明拨禾轮能正常工作起到拨禾作用。弹齿运动轨迹为次摆线,且每个环扣都相切,所以λ≈1.935是本文设计拨禾轮的能正常工作的λ上限。
综上所述,当λ<1时,由实验(1)可知,弹齿水平分速度依然为正值,和拨禾轮水平前进方向保持一致,没有向后的运动趋势,拨禾轮不具有工作能力,不能正常工作,不符合拨禾轮运动要求;当λ>1.935时,由实验(4)可知,虽然拨禾轮具有拨禾功能,但是农作物遭到多重撞击,对农作物的穗部冲击加大,使收割损失剧烈增加,不符合拨禾轮运动要求;当λ=1和λ≈1.935时,则是拨禾轮分别是其可以正常工作,和过多的拨禾作用从而造成收割损失加大的临界点;所以当1<λ<1.935是本文设计拨禾轮可以正常工作时λ的合理取值范围。
4 结 语
为了减少联合收割机收获损失,首先对拨禾轮进行理论建模,再利用Solid Works 2020软件对拨禾轮的各个构件进行实体建模和装配,然后将其装配体导入ADAMS2020软件中,并对拨禾轮进行仿真实验研究。以拨禾轮弹齿末端为观察对象,在λ不同取值时,对其运动轨迹,水平位移曲线及水平分速度曲线进行实验分析。最后得出,1<λ<1.935时是本设计的拨禾轮能正常工作的必要前提。拨禾轮设计与实验得到的拨禾轮工作参数和调节范围,有利于减少农业联合收割机工作时农作物的损失,提高联合收割机的收割效率。
猜你喜欢
今日农业(2022年16期)2022-11-09
今日农业(2022年15期)2022-09-20
今日农业(2022年13期)2022-09-15
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
今日农业(2021年16期)2021-11-26
快乐作文(1.2年级)(2020年10期)2020-09-10
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
农民致富之友(2020年20期)2020-07-18
农民致富之友(2018年7期)2018-05-04
