
船舶自动舵航向保持与航迹保持模式的比较研究
2021-12-21 01:18李磊谢涌储凌剑中国卫星海上测控部
珠江水运 2021年22期
◎ 李磊 谢涌 储凌剑 中国卫星海上测控部
近年来,航运事业的不断发展对船舶航行安全性和经济性的要求不断提高,对自动舵控制系统的控制性能要求也越来越高。目前,自动舵操控船舶主要以航向保持和航迹保持两种模式为主,无论何种模式,均有效减轻了航海人员的劳动强度,同时在某种程度上提高了船舶航行的操纵性、安全性和经济性。
航迹保持模式是继航向保持模式之后研发出来的,其控制性能更优,自动化程度更高,能够实现自动转向功能。从实现“无人驾驶”这一终极目标考虑,航迹舵的使用普及将是未来船舶操控技术发展的大势所趋。因此,突出使用航迹保持模式的优势,推进航迹舵在航海中的使用普及逐步成为当前航运事业的一大焦点。
1.自动舵及其工作模式
自动舵又称自动操舵仪,是船舶系统非常重要的设备,也是实现船舶运动控制的关键设备,在一定航行条件下(如:大洋航行)能够自动纠正偏航角度或者偏航距离,从而使船舶近似或精确地在设定航向或设定航线上航行。近年来,随着自动舵设计技术逐步成熟,国内外市场出现了多种成熟的航向舵、航迹舵产品,其工作模式主要分为航向保持模式和航迹保持模式。
1.1 航向保持模式
航向保持模式是由驾驶员根据实际情况设定计划航向值,自动舵通过控制系统结合风流压差情况,不断调整航向使船舶在计划航向上行驶。该模式要求控制系统给出控制舵角δ克服外界环境的干扰和船舶六自由度运动复杂性的特点,尽可能使航向φ维持在设定航向φr上。如图1,该模式控制舵角δ是航向误差Δφ=φr-φ和转首角速度r的函数:
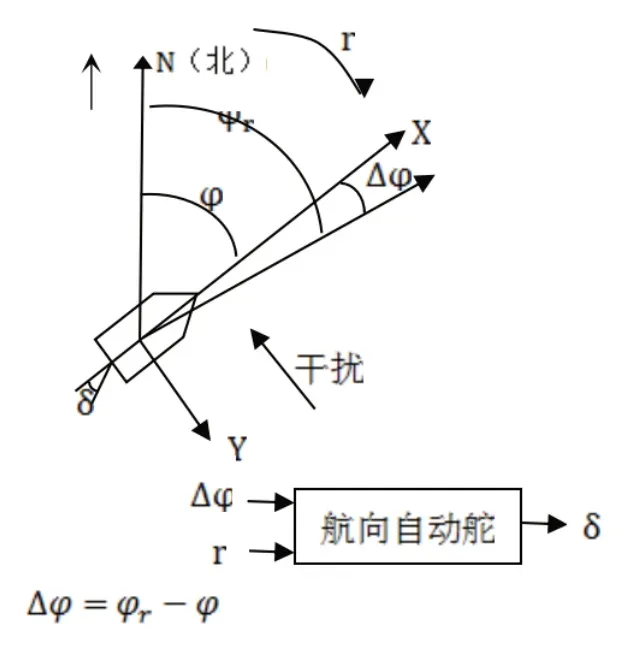
图1 航向保持工作模式
这个函数关系中,如果δ与Δφ和r成线性关系的话,就能够设计出比例-微分(PD)舵,这是一种已得到广泛应用的控制律。
1.2 航迹保持模式
航迹保持模式是继航向保持之后设计出来的,自动舵通过控制系统综合考虑风流压、偏离航线距离、转向点等情况,不断调整航向使船舶保持在计划航线上行驶。该模式要求控制舵角克服外界环境的干扰和船舶本身六自由度运动复杂性的特点,使船舶的运动轨迹尽可能地维持在设定航迹线上。显然,该模式的控制律更为复杂,既要消除航向误差Δφ=φr-φ,还要消除实际船位偏离设计航迹线的航迹误差η,另外需要说明的是,在这种模式下,φr是指设定航迹线上与实际船位距离最近点的切线方向。如图2,控制舵角δ应该是航向误差Δφ=φr-φ、转首角速度r和偏航距离η的函数:

图2 航迹保持工作模式
众所周知,人的智能是任何自动化装置都无法比拟的,自动舵这两种工作模式也是如此。无论设计者如何费尽苦心,航向保持模式和航迹保持模式都有着自身避免不了的固有缺陷:航向保持模式无法实现自动转向,而航迹保持模式在自动回归到计划航线期间,无法自动识别危险情况。
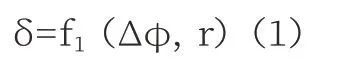
如图3,航迹保持模式下,b船在1位置处偏离计划航线较远,控制系统给出控制指令使b船转向到2处位置,如果这时在航线左侧有图中c船(常与本船形成对遇局面),那么由于两者逼近速度非常快,即使短短几分钟时间也很有可能构成紧迫局面甚至发生碰撞事故。
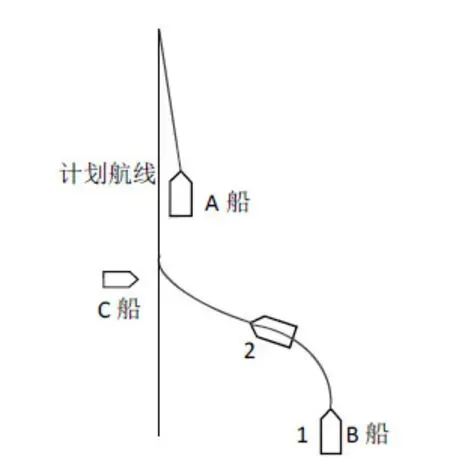
图3 会船
通过以上分析可知,自动舵的核心在于控制律,即寻求确定函数f1、f2的方法并得到最终结果。目前,绝大多数自动舵均具备航迹保持这一控制技术,但该项技术依然不够成熟,国内外学者一直致力于尝试应用各种不同的控制算法,以各自优势弥补对方不足。尽管如此,对于船舶应用而言,目前航迹舵的发展程度足以满足广大船员的使用要求。如果在航行中能够使用航迹保持功能,则在一定程度上能起到节省人力、物力、财力的作用,更能进一步达到提高海运事业经济效益的目的,也将使“无人驾驶”技术更快走向成熟。
2.自动舵两种模式间的比较研究
简单的船舶自动舵控制系统如图4所示,其中R为某一工作模式下设定的控制量,如:航向保持模式时,R是指设定航向值;航迹保持模式时,R则代表处于激活状态的计划航线与船位最近处的切线的方向。C是通过反馈传感器进行实际测量得到的船舶航行出来的与R相对应的量的实际值,如:航向保持模式时是指船舶实际航向。Δ=R-C是在自动舵模式下控制量的设定值与测量值的差,用来作为控制器的输入。以航向保持控制器为例,它是根据控制量航向的偏差大小设计一个控制律,通过控制输出命令舵角δr打舵使船舶沿着减小航向偏差的方向航行,使最终偏差为0。δr为控制器的输出,同时也是被动对象的输入。
图4 自动舵控制器系统图
2.1 从本质层面上进行比较
船舶自动舵航迹保持模式目前有综合控制和分离控制两种方案。其中综合控制方案主要用于对航迹进行高精度控制的场合,该控制方案基本还停留在仿真阶段,使用起来存在不少问题,且成本较高,即使成型后使用也会很少。因此,接下来将以航迹舵分离控制方案为例对两种基本功能模式进行比较。
首先,对分离控制自动舵设计方案进行详细介绍。如图5,整个方案把控制分成相互嵌套的三个控制环,外环又称航迹环,将GPS定位的船位数据与计划航线比较获得偏离航线距离η(k)(以下称为“偏航距离”),通过航迹控制算法得到一个命令航向φr(k)给航向控制环,从而引导船舶向着消除或者尽量减少偏航距离的方向航行;中环又称航向控制环,将罗经测得的船舶实际航向φ(k)与航迹控制环给出的命令航向φr(k)比较产生误差信息Δφ(k)=φr(k)-φ(k),通过航向控制算法得到一个控制舵角δr(k),通过伺服机构执行控制舵令,使船舶向减少航向偏离误差的方向操纵;内环又称舵角控制环,通过舵角传感器把伺服舵机实际实施的舵角δ(k)的大小反馈给控制舵角输出,与控制舵角δr(k)进行比较,从而驱动伺服舵机使舵角度δ(k)和中环给出的控制舵角δr(k)尽可能保持一致,最终操纵船舶航行在计划航线上,实现航迹保持。
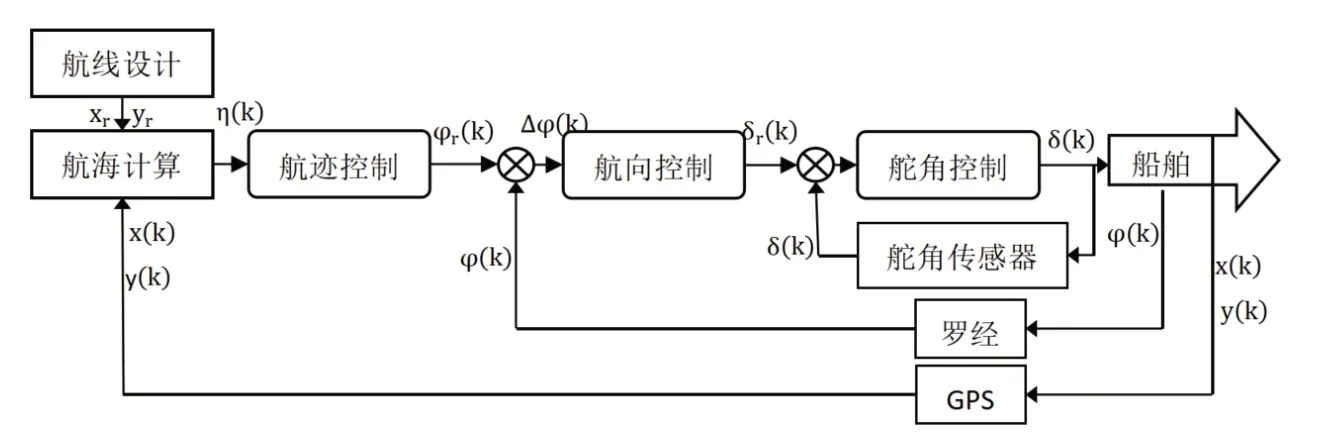
图5 航迹舵分离控制设计方案
通过以上分析并结合上部分对两种功能模式的原理介绍,显然能够看出分离控制方案是把航迹控制和航向控制分别作为两个模块独立设计,这也是自动舵的发展趋势,可根据用户要求,选配航迹控制模块,易于实现功能扩展。而在航向控制模块的基础上增加航迹偏离误差反馈这一闭合环路后控制器就能够不断更新航向控制中所采用的命令航向φr(k),最终实现航迹保持这一功能。就是说,在航向保持模式下,命令航向φr(k)是一个定值,是驾驶员在自动舵设置面板上所设置的值;而在航迹保持模式下,命令航向φr(k)却是一个不停变化的值,是通过计算计划航线上与船位最近点的切线方向所得到的。
航迹舵相当于所设置的参考航向不停改变着的航向舵,而这个参考航向就是通过外环(航迹控制环)对航向偏离误差、转首角速度、偏离航线距离计算而得到的。使用一个不停变化的参考航向与使用一个设定不变的参考航向值相比,显然就需要更频繁的要求执行舵角或者甚至更大的幅度,这样势必会对舵机伺服机构造成不必要的冲击损耗。但是在自动舵设计时,设计者分别引入表征航向均方误差的指标IT和舵角均方值的指标JT:
其中,IT代表控制精度,JT代表控制导致的舵机损耗,这样通过分离控制方案中三大组成闭环的相互协调合作使这两项指标以小为好,这样既能够达到尽量较小对舵机的损耗的目的,同时提高船舶控制性能。
2.2 从实际应用上进行比较
结合上述分析,我们知道自动舵核心是设计控制器所使用的控制算法,但任何控制器的设计都是为了投入实际应用,航海人员更多的不会关心它使用何种控制算法,而是使用这种控制器所获得的控制效果、与人工操舵相比其优势所在以及不可避免的缺陷、能否实现在船舶操纵方面摆脱体力劳动减少人员配置的最终目的。因此,本文通过实船实验,从利用自动舵进行船舶操纵实践的角度分别对航向保持和航迹保持两种模式各自的性能情况进行对比评价,并结合船舶驾控技术发展趋势对其做进一步研究。
以下是某轮在某航次中使用自动舵分别在航向保持和航迹保持模式下进行实验得到的实际数据,如图6。
图6 航向舵及航迹舵实验
其中航向舵实验于2020年4月13日下午14:00 开始进行,当时海况:风6级,浪4级,船速16.0节,在自动舵控制面板上设置船舶航向217°。航迹舵直线段实验于2020年4月13日晚18:30开始进行,当时海况:风6级,浪5级,电子海图上设计航线的航向为180°,实验期间船速变为16.9节。
比对图中数据可以看出,自动舵在航向保持模式下控制船舶运动的性能较航迹保持模式下差,具体分析如下:
(1)稳定性。使用航向舵时,其走过的航迹是由曲折的曲线连接而成,就会造成航行过程中稳定性较差,导致航程的不必要增加;而使用航迹舵时,船舶走过的航迹严格压在计划航线上,其航迹线接近于直线,也尽可能避免了不必要的航程增加。
(2)准确性。从目前现状看,航向舵控制船舶的准确性已经达到船员在大洋航行时对其的一般要求,然而从长远发展角度考虑“无人驾驶”的实现,提高船舶控制系统的准确性能是十分有必要的,而航迹舵正是为这样的提高起了基奠作用。在航向保持模式下,自动舵只负责尽量把船舶航向把定在设定值,至于偏离设计航线的远近完全靠驾驶员的航行操作来控制;在航迹保持模式下,这一缺点得到了充分弥补,它能够更精确地控制船舶运动几乎完全消除偏离航线距离,从而提高自动舵控制系统的准确性。这一性能的提高,一方面使船舶的航行充分考虑了在设计计划航线时所考虑的安全因素(如水深浅点、碍航物等);另一方面也起到减少不必要航程的作用。
(3)快速性。通过实验记录可以看出,在影响船舶操纵的外界因素基本不变的情况下,使用航迹舵时船速达到16.9节,较航向舵优,这一点保证了航迹舵操纵船舶的快速性。
(4)节能经济。对于船舶运动控制系统的节能性、经济性,主要考虑两方面问题:(1)主机负荷是否增加,导致主机输出功率提升;(2)控制器要求用舵是否过频,或者用舵幅度是否过大。
在开始进行航迹舵实验时,初期发现这种模式下控制器给出的舵角幅度偏大,但经过长时间(持续使用4个小时)使用航迹舵,即在整个航迹舵系统运行稳定后,并不再存在这一问题。另外,在航行实验过程中,除了外界风浪对船体包括舵设备的冲击影响外,主机转速基本稳定。
接下来结合图7,对(2)中提到的问题进行分析:
图7 两种工作模式下的航向记录
图中分别显示了航向保持模式、航迹保持模式下的航向打印记录,其中航段的选取以随机、公正、突出代表性为原则。从图中可以看出,直线航段航迹保持时航向变化震荡曲线较航向保持时稳定,这较大程度上能够说明其稳定性高。另外,也较凸显出了航迹舵能够减少不必要航程的优点,通过减少航程同时也提高了船舶的运营经济效益。
(5)简单。由于航海历史发展原因,船员和设计者一再提倡“船舶设备越简单越可靠”的原则,对于自动舵控制器来说同样适用。关于这一点,多数船员普遍认为使用航迹舵操作复杂,没有使用航向舵可靠、放心,但如果仔细纠察在航迹舵模式下的操作时我们会发现,其实相对航向舵来说,仅仅多了一步:就是在大洋中如果由于临时原因需要违背计划航线改变航向时,必须先把航迹模式切换成航向模式,才能够进行改变航向,仅仅多了这一步而已。所以,关于船员对其的认识,本文认为更多的原因在于习惯做法问题上。
3.结论与展望
本文对船舶自动舵两种工作模式进行了较全面的比较研究,理论与实践相结合,讨论了自动舵两种工作模式所使用控制器的性能特点,并结合航向舵实验,突出自动舵在航迹保持模式下其综合性能较航向保持模式下更具优势的结论。但在船舶自动化逐步走向“无人驾驶”的过程中,这个领域仍存在很多问题,如:在不同航行阶段自动舵、手操舵、应急舵之间转换使用优先权问题,自动避碰技术实现后的普及问题,自动靠离泊技术实现后的推广问题等,在解决这些问题时都不可避免地会遇到类似航迹舵普及所面临的问题,这也是本文写作的目的所在,希望能够为这方面的研究起到抛砖引玉的作用。
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2020年4期)2020-06-19
青年歌声(2019年12期)2019-12-17
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年7期)2017-11-24
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16
中国水运(2015年2期)2015-04-23
