
船舶智能辅助靠泊系统研究与开发
2021-12-21 01:18穆胜军汪伟奎张华天津中海油油田设施管理有限公司
珠江水运 2021年22期
◎ 穆胜军 汪伟奎 张华 天津中海油油田设施管理有限公司
谢斯 曹亮 广东海洋大学
1.引言
三用工作船是一种守护船,主要负责领域是海上石油工程,一般在近海航区和无限航区航行。大多时候围绕海上石油平台低速巡航,受海上石油平台调遣,为其运输物资和材料。三用工作船本身可以自主进行抛起锚作业,以及进行平台和大型船舶的拖运作业,另外还有消除油污、营救工作人员、捞取油管、帮助提炼石油等相关作业。对三用工作船的作业安全进行管理,不仅涉及到参与工作船本身的人员安全以及维修保养问题,同时还牵扯到货物、港口、航道设施等的安全。近些年海上油田多次发生三用工作船靠泊碰撞事故事件,例如2005年某轮离塘沽某码头到NB35-2送料值班,因能见度不良等原因撞断锚缆。2017年5月30日 某三用工作船在东海某油田发生碰撞平台事故。
分析事故原因,固然存在人为操船因素,但以下因素也是造成事故不可忽视的原因,需要技术手段予以克服。
(1)三用工作船需要靠泊在平台下指定位置。船长在靠泊操作过程中主要依据视觉来测距和由此感知的环境因素来预估安全程度。尤其是平台周围参照物少、靠泊作业时间长,造成了船长和操作人员的疲劳和疏忽,进而导致事故发生。另外,船长操作还有视觉盲区,需要现场人力进行视觉观测距离,这又增加了靠泊的操作风险。
(2)风浪流的不断变化,增加了停靠难度,需要技术手段观测距离。
(3)靠泊作业要求船舶控制在离设施较小的范围内,需要技术手段支持。
(4)长时间靠泊操作,需要船长保持精力充沛、精神集中,工作压力大,易麻痹大意和疏忽。
为此,需要针对上述情况,开展相关研究,对三用工作船靠泊工作予以技术装备辅助支持。
近年来无人车、无人船等智能感知技术与激光雷达快速发展。激光雷达在智能驾驶领域也得到了较快的发展,用于物标检测和避障等辅助功能,这为本研究提供了较好的基础。开展“三用工作船智能辅助靠泊系统开发与应用”,在三用工作船上部署激光摄像头、后端服务器,研制出一套基于激光雷达的智能辅助靠泊系统,实现三用工作船在船尾靠泊的横向和纵向测距和并靠中的测距,可以有效消除船长观测盲区,显示出可操作纵向和横向空间的大小,为船长的安全操作提供精准支持,减轻人为观测的压力,提升安全靠泊能力。
图1 某三用工作船碰撞平台事故示意图
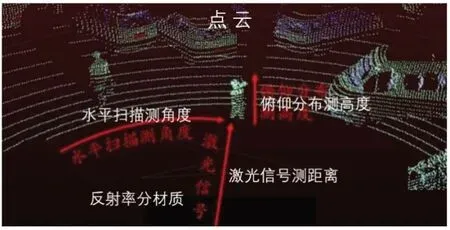
图2 激光点云成像示意图
2.激光测距和成像原理
激光雷达最大优势是三维点云建模技术。激光雷达通过测量激光信号的时间差和相位差来确定距离,通过水平旋转扫描来测角度,并根据这两个参数建立二维的极坐标系,再通过获取不同俯仰角度信号获得三维中的高度信息。高频激光可在一秒内获取大量(约150万个)的位置点信息(称为点云),并根据这些信息进行三维建模。

图3 主激光雷达配置示意图
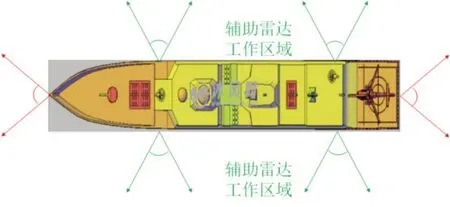
图4 补盲雷达达配置示意图
3.三用工作船智能辅助靠泊系统设计
研发符合实际工作需要的三用工作船智能辅助靠泊系统,可以有效消除船长观测盲区,显示出可操作纵向和横向空间的大小,为船长的安全操作提供精准支持,减轻人为观测的压力,提升安全靠泊能力。另外,还可以用于船舶在石油平台附近巡航时候的异物侵入航线,助力船舶安全航行。通过使用三用工作船智能辅助靠泊系统,可以提高三用工作船靠离泊安全水平,节约操作时间和减轻工作强度,降低靠离泊作业经济成本。
(1)主激光雷达。在三用工作船顶部安装主雷达,雷达水平扫描360度,上下视野在30-40度左右,可以有效抵消船舶周期性摇摆对雷达成像的影响问题。
(2)补盲雷达。在三用工作船下层安装补盲雷达,可以用于消除主雷达盲区,其中前部和后部需要设置高精度激光雷达。
(3)视频与激光雷达信息融合。在关键位置设置视频采集装置,并实现激光雷达测距和3D成像(如图5所示)。测距结果数据与红外摄像数据相融合,在图像上显示距离平台的距离并予以报警。
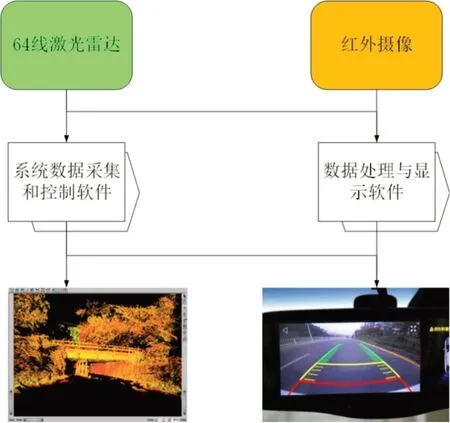
图5 视频信息融合示意图
4.系统的创新
(1)首次提出了基于多激光雷达与摄像头的三用工作船智能辅助靠泊系统概念,实现“船”与“外界环境”的智能交互,对外界环境进行实时感应和监测。
(2)采用先进算法,提供了船舶靠泊的智能化、数据化和可视化的能力,提示出三用工作船靠泊平台、码头和并靠其他船舶的空间大小,提升了靠泊的安全能力,结束了传统靠泊工作以人眼观察误差大的弊端。
(3)采用先进算法,提供了船舶巡航、航行中物标侵入的检测能力,提升了航行安全能力,降低了人为观测难度,缓解了人的操作疲劳。
5.总结
本研究开发方虽作出了最大限度的努力,初步实现了系统功能,但由于现有的认识水平、技术水平、科学知识及其他现有条件的限制,还存在一定的提升空间,期望再进行深入的研究,为同类型船舶提供一个智能安全解决方案。
猜你喜欢
北京测绘(2022年5期)2022-11-22
河北理科教学研究(2021年3期)2022-01-18
发明与创新(2021年39期)2021-11-05
汽车观察(2021年8期)2021-09-01
小哥白尼(趣味科学)(2020年5期)2020-05-22
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
材料科学与工程学报(2016年1期)2017-01-15
小主人报(2016年9期)2016-12-01
小布老虎(2016年5期)2016-02-28
