
基于结构光的表面缺陷检测系统影响因素分析
2021-12-20 08:03徐平
河南工程学院学报(自然科学版) 2021年4期
徐 平
(河南工程学院 土木工程学院 ,河南 郑州 451191)
在产品质量缺陷检测中,有时需要用到产品的三维信息,如机械零部件中常见的孔和裂纹缺陷,既需要直径数据又需要孔的深度参数,此时就要进行三维数据的获取。目前常用的三维数据获取方法有结构光法[1-4]和立体视觉法[5-8]。结构光测量系统通常用于干扰因素较少的场合,以避免其他光源对结构光编码信息产生干扰,但在实际生产环境中,周围物体的反射光线或者环境中其他光源都会导致相机采集到错误信息。这些干扰因素包括漫反射、互反射、表面散射和投影仪离焦等。Achar等[9]对全局光照形成原因进行了分析,并采用多投影仪分离全局光照;林志洁等[10]提出了一个投影显示补偿方法来减少互反射,并防止图像质量下降;张越一[11]提出使用高频条纹抵抗全局光照的干扰;王昌龙等[12]采用一种组合编码结构光码值优化方法来减少反射光的影响。
本研究通过搭建结构光测量系统,对影响结构光测量系统精度的主要干扰因素进行了分析,以期提高结构光测量质量。
1 结构光测量系统原理
结构光测量系统基于三角法工作原理,一般可根据光源的不同分为点式结构光、线式结构光和光栅(编码)结构光系统。本研究采用光栅结构光系统,主要包括相机、光源(投影仪)和被测物体,其中相机一般为CCD相机,用于接收被测物体表面图像,投影仪用于产生拍照所需的明暗不同的光线。整个测试系统如图1所示。

图1 测试系统Fig.1 Test system
在该系统中,相机、投影仪(光源)形成三角关系,可利用它们之间的三角几何信息进行三维测量,具体过程如下:利用投影仪将按照一定规律排列的明暗相间的光照射到被测物体表面,由于被测物体表面不同,投射的光会扭曲变形,而变形和物体表面的形状有着直接关系,CCD相机能够捕捉到明暗变化的图像(点云)。如果相机、投影仪与被测物体之间的距离一定,即可利用得到的图像获得产品表面的数据。
结构光测量系统由硬件和软件两部分组成。其中,硬件包括投影仪、CCD相机(相关参数见表1),软件包括标定软件和检测程序。
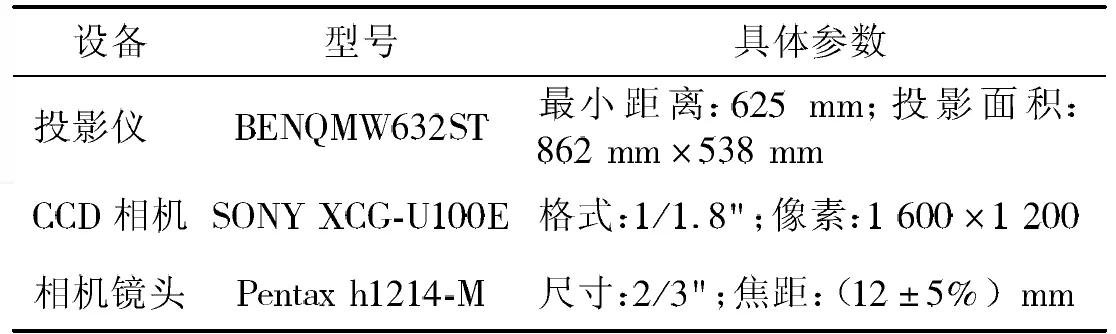
表1 硬件参数Tab.1 Parameters of the hardware
采用结构光系统进行零部件表面缺陷检测时,需要基于采集到的点云数据进行分析,故点云数据的准确性直接影响检测效果。但是,在实际采集过程中,点云数据常受到周围环境的影响,为此对其影响因素进行了分析。
2 影响测量精度的因素
2.1 外部光源
在分析过程中,对一个木板(图2)进行了测试。该木板表面有孔裂纹,以孔识别为基础对影响测试过程的因素进行了分析。基于结构光的系统进行表面信息获取时,一般是利用竖直方向的数据点来获取高度或者深度的数据,采集到的点云数据中,孔的相关点云会有一定的Z值(此处默认竖直方向为Z方向),可以利用Z值来区分木板表面和孔,如图3所示。
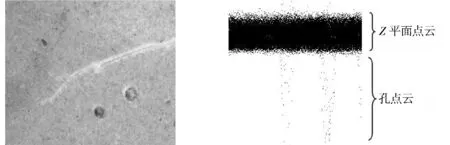
图2 测试用木板 图3 面和孔点云示意图 Fig.2 Test board Fig.3 Picture of the plate and hole points cloud
由图3可以发现,平面点云坐标值也不完全一致,而是一个区间。分析可能是外部光源的影响,为此分别对有、无外部光源的情况进行了对比。其中:有外部光源是在测试过程中外部采用40 W日光灯提供照明,且灯管在整个测试系统正上方1 m处;无外部光源是利用纸箱将整个测试系统完全密闭,保证没有光源影响。
光源对点云数据的影响见图4。为了避免测试过程中随机误差的存在,每次测量都进行了3次。
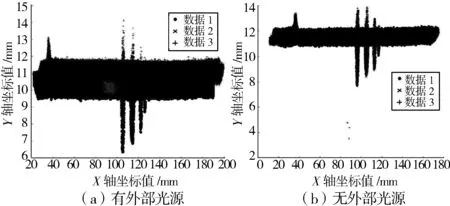
图4 光源对点云数据的影响Fig.4 The effect of light on points cloud
由图4可见:当存在外部光源时,3次所测得的表面Z坐标最大值约为11.8 mm,最小值约为9.6 mm,误差达到2.2 mm;当无外部光源影响时,虽然表面Z坐标也有一定差别,但3次测量的重复性较好,误差基本能够控制在1 mm左右(Z坐标的最大值和最小值之差)。主要原因是结构光方法采用格雷码结合相移的编码,该方法的基础是灰度值,当外部有光源时,会在投影仪基础上增加一个光源,使获取的灰度值偏大而导致误差。因此,在实际应用中需要考虑外部光源的影响,尽量避免外部光源,可以采用密室来减少干扰信号。
2.2 金属表面反射
在对零部件表面特征进行提取时,有时零件表面会有反射。比如发动机连杆机构,由于其表面粗糙度较低,金属表面甚至会出现镜面反射,此时有无外部光源,在数据采集过程中都会有反射现象。为此,对有、无反射进行了对比,第一次数据采集时不对金属表面进行处理,第二次对金属表面进行喷涂处理,以消除镜面反射。
图5为金属表面有无涂层时采集到的点云数据对比。由图5可知:无涂层时,金属的镜面反射较为严重,使得采集到的点云出现了无点云数据的情况,进而无法得到相关特征;金属表面增加涂层后,采集到的点云数据就较为完整,4个孔的特征都能够明显看到。

图5 有、无涂层时的点云数据对比Fig.5 The comparasion of data with and without coat
由此可见,在实际应用过程中,可在金属表面添加涂层,消除金属表面的镜面反射,以利于后续产品缺陷特征的提取。
3 结论
基于结构光技术对物体表面缺陷进行检测时,干扰因素会影响测试结果,针对外部光源和产品表面反射对测试结果的影响进行了分析,得到以下结论:
(1)外部光源使得获取到的点云数据坐标值存在较大误差,建议在实际测试过程中采用密室方法屏蔽外部光源。
(2)金属表面的反射使得点云数据无法获取,建议在实际测试过程中对其表面进行钝化处理。
猜你喜欢
故事作文·高年级(2021年11期)2021-11-28
成都信息工程大学学报(2021年4期)2021-11-22
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
发明与创新·中学生(2020年12期)2020-01-11
家庭影院技术(2018年10期)2018-11-02
山东工业技术(2018年16期)2018-09-26
电子制作(2018年2期)2018-04-18
中国计算机报(2017年36期)2017-10-17
课程教育研究·新教师教学(2015年5期)2017-09-27
