
基于扩张状态观测器的电机模型预测鲁棒控制*
2021-12-18 13:38孔国利
制造技术与机床 2021年12期
刘 洋 孔国利
(①河南机电职业学院信息工程学院,河南 郑州 450001;②郑州工程技术学院信息工程学院,河南 郑州 450044)
永磁同步电机在现代机械制造中发挥了重要作用[1-2],但在实际工作中,永磁同步电机不可避免地受到摩擦阻尼的影响,从而影响电机的控制精度[3-4]。永磁同步电机在工作过程中,难以获得工作对象的准确信息,负载力矩是完全未知的,如果仅仅按照额定负载力矩来设计控制方法,则必然会影响该方法的实际应用效果[5-6]。另一方面,永磁同步电机是电磁设备,其工作状态受电磁影响较大,电磁干扰也会严重制约电机的正常工作[7]。
为了提高控制精度,必须对阻尼摄动、未知负载以及电磁干扰下的数控机床电机鲁棒控制展开研究。文献[8]设计了新型平滑非奇异终端滑模控制方法,有效提高了伺服电机转速系统的鲁棒性,但没有考虑各类干扰的影响;文献[9]针对永磁同步电机,提出一种新型离散比例-积分滑模复合速度控制方法,实现了对伺服电机的鲁棒控制,但是响应速度较慢;文献[10]针对含参数不确定性的伺服电机驱动系统,设计自适应反步控制器和最优保性能鲁棒控制器来抑制干扰,但是也没有考虑复合干扰的影响;文献[11]针对伺服电机提出一种鲁棒反步控制方法,有效地消除了不确定性扰动对系统的影响,但是动态性能不好。本文针对阻尼摄动、未知负载以及电磁干扰影响下的机床伺服电机,提出了一种改进的模型预测控制方法,通过设计扩张状态观测器来快速准确估计复合干扰,并将估计结果引入到模型预测控制中,改进了模型预测控制的鲁棒性,最终实现对永磁同步电机的快速和准确控制。
1 永磁同步电机模型建立
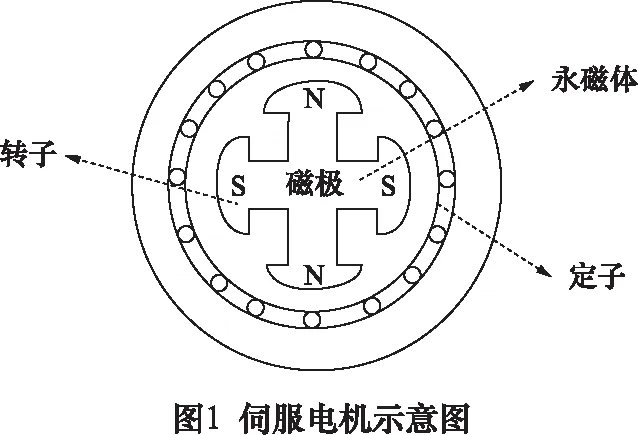
永磁同步电机的示意图如图1所示。
数学模型可以描述为[12]:
(1)
式中:ω为转子转速;n为电机的磁极对数;ψ为永磁体产生的磁链;J为电机的转动惯量;B为阻尼系数;Tf为电机的额定负载力矩。
当转子高速转动时,利用额定阻尼系数可以精确地描述摩擦阻尼;然而当转子低速转动时,额定阻尼系数难以准确描述电机的摩擦阻尼,阻尼系数会发生摄动。因此,为了提高控制精度,必须考虑阻尼摄动情况,则永磁同步电机的数学模型可以描述为:
(2)
式中:ΔB为阻尼系数B的摄动情况。
永磁同步电机在实际工作中,工作对象不是固定不变的,其负载力矩往往是变化且未知的,因此必须考虑未知负载力矩对电机控制的影响,永磁同步电机的数学模型可以描述为:
(3)
式中:ΔTf为未知负载力矩。
另外,永磁同步电机的精度控制需要绝对稳定的电磁环境,因此必须考虑电磁干扰的影响,永磁同步电机的数学模型可描述为:

(4)
为了便于分析,令d表示复合干扰,则考虑阻尼摄动、未知负载力矩和电磁干扰的永磁同步电机数学模型可以描述为:
(5)
2 改进模型预测控制律
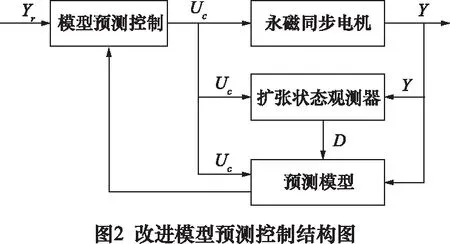
针对永磁同步电机提出了一种改进的模型预测控制方法。首先设计了扩张状态观测器[13]来对复合干扰进行精确估计,并将其引入模型预测控制[14]中,实现对永磁同步电机的鲁棒控制。改进模型预测控制结构图如图2所示。
2.1 扩张状态观测器设计
定义状态变量x1=ω、x2=d,则永磁同步电机的扩张状态模型可以描述为:
(6)
针对扩张状态模型式(6),设计扩张状态观测器:
(7)
式中:z1是转速ω的估计值;z2是复合干扰d的估计值;-p表示扩张状态观测器的极点值,满足p>0。
令e1=z1-x1,e2=z2-x2,分别为转速ω和复合干扰d的估计误差,则扩张状态观测器的误差微分方程为:
(8)
对式(8)进行拉氏变换,可以得到扩张状态观测器的特征方程为:
s2+2ps+p2=(s+p)2=0
(9)
式中:s为拉式变量。由式(9)可以得到,当p>0时,可以确保扩张状态观测器的极点分布在左半平面,既可以确保扩张状态观测器的系统误差收敛到0,同时能够准确估计复合干扰d的大小。
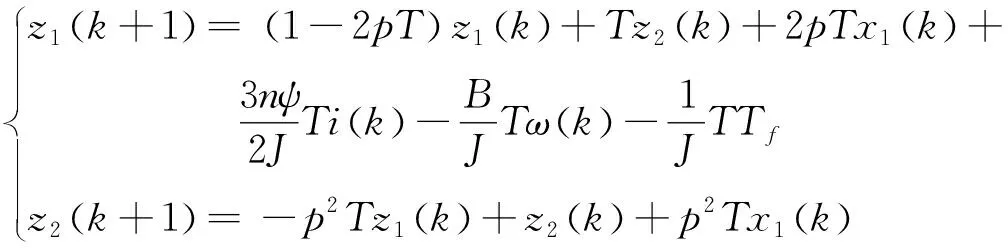
永磁同步电机通常采用数字控制,假设采样周期为T,利用前向欧拉法[15]离散化永磁同步电机的扩张状态观测器为:
2.2 模型预测控制律设计
本文在扩张状态观测器式(10)的基础上,设计模型预测控制律,来完成对永磁同步电机转速的精度控制。
第1步:预测模型

第2步:预测输出
定义控制序列U、复合干扰序列D和输出序列Y如下:
式中:U∈RNp,Y∈RNp,Np为预测步数。
利用预测模型(11),经Np步预测,得到数永磁同步电机的预测输出为:
为了便于描述,将式(14)化简为:
第3步:代价函数
模型预测的控制指令是通过解算性能指标函数得到的,设计永磁同步电机的性能指标函数为:

(15)
式中:qi>0,ri>0;ωr为转速指令;ic为最优控制电流,即为所求的最优控制指令。
性能指标函数可以化简为:
第4步:滚动优化
由式(16)可以得到,永磁同步电机的性能指标函数的具体表达式为:

(18)
通过式(17)和式(18)求得最优控制指令为:
(19)
3 对比仿真
为了验证提出控制方法的效果,对永磁同步电机进行对比仿真实验。
3.1 参数设置

永磁同步电机的参数如表1所示。
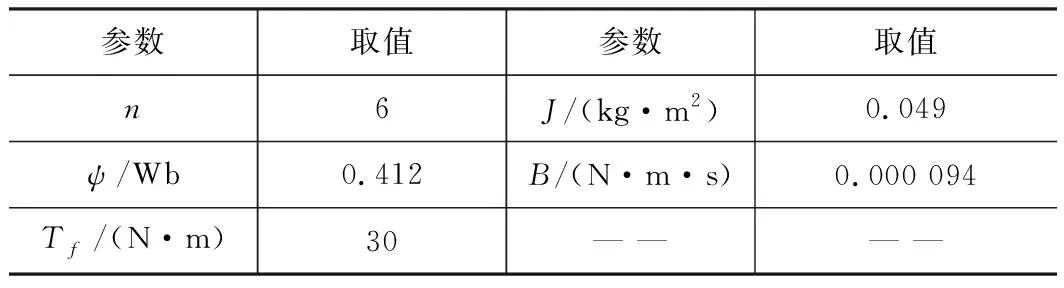
表1 永磁同步电机参数
3.2 复合干扰估计
为了验证设计的扩张状态观测器对复合干扰的估计效果,分别采用文献[16]的扰动观测器和本文方法进行对比,仿真结果如图3和图4所示。
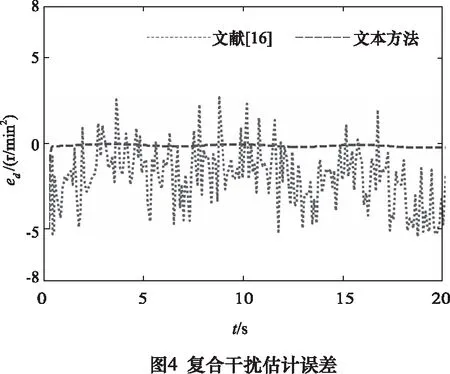
由仿真结果图4可以看出:文献[16]设计的扰动观测器能够近似估计机床伺服电机的复合干扰,但是响应速度比较慢,需要2 s左右才能基本跟上复合干扰的真实值,并且估计精度不高,估计误差范围为(-6~3) r/min2;而本文设计的扩张状态观测器能够快速、准确估计复合干扰,在0.3 s就可以稳定跟踪复合干扰的真实值,估计误差范围为(-0.2~0.2) r/min2。
3.3 改进模型预测控制仿真结果
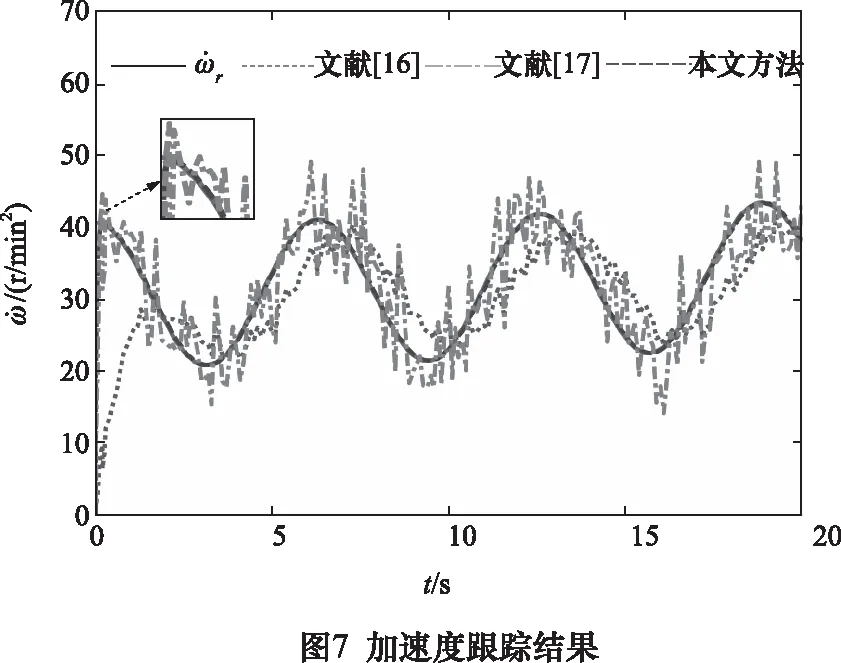
为了验证本文设计的改进模型预测控制方法的效果,分别采用文献[16]的滑模控制方法、文献[17]的模型预测方法和本文方法进行对比仿真,仿真结果如图5~8所示。
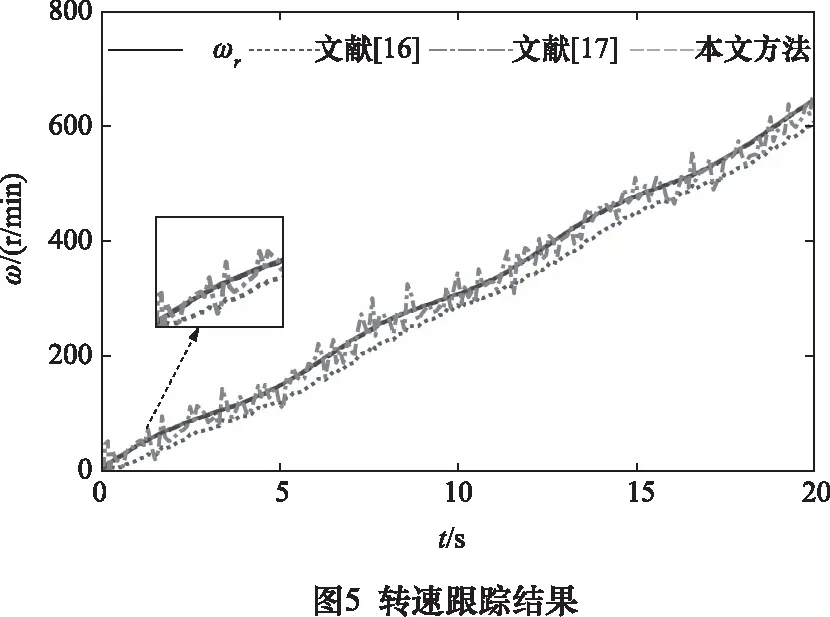
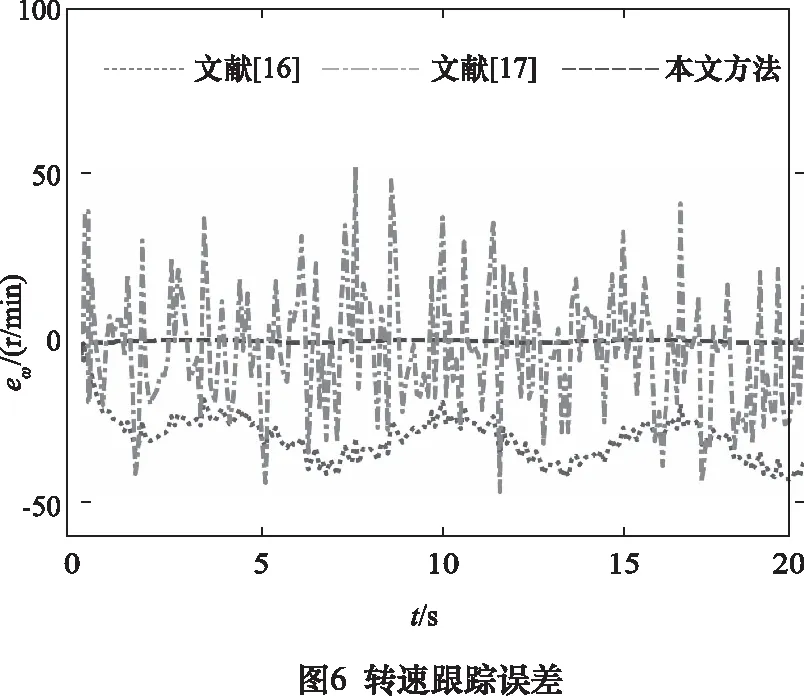
从图5和图6的结果可看出:在响应速度方面,文献[16]滑模控制方法总是滞后于指令信号,并且需要2 s左右才可以大致跟随指令信号的变化趋势,而文献[17]的模型预测控制方法与本文的改进模型预测控制方法在0.3 s内就可以跟踪到指令信号,没有滞后现象;在跟踪误差方面,文献[17]模型预测控制方法的转速跟踪误差范围为(-50~50) r/min,文献[16]滑模控制方法的转速跟踪误差范围为(-40~0) r/min,而本文改进模型预测控制方法的转速跟踪误差范围为(-0.3~0.3) r/min。
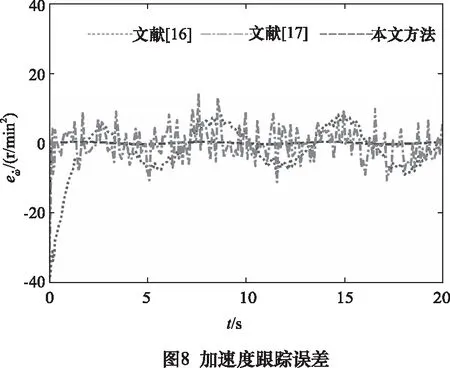
从图7和图8的结果可看出:在响应速度方面,文献[16]滑模控制方法总是滞后于指令信号,并且需要2 s左右才可以大致跟随加速度指令信号的变化趋势,而文献[17]的模型预测控制方法与本文的改进模型预测控制方法在0.3 s内可以实时跟踪指令信号,没有滞后现象;在跟踪误差方面,文献[17]模型预测控制方法的加速度跟踪误差范围为(-12~15) r/min2,文献[16]滑模控制方法的加速度跟踪误差范围为(-8~8) r/min2,而本文改进模型预测控制方法的加速度跟踪误差范围为(-0.3~0.3) r/min2。
4 测试实验
为了验证本文方法在实际工程应用中对数控电机控制的准确性,分别采用文献[16]的滑模控制方法、文献[17]的模型预测方法和本文方法在GSK电机上进行对比实验。测试平台主要由电机80SJTA-M024E、适配驱动器SD300-20AL、控制器、直流电源和转速测量仪等组成,如图9所示。
实验采用定速测量误差法对不同控制方法进行评价,测试中设定10个不同转速的指令信号,转速分别为:100 r/min、200 r/min、300 r/min、400 r/min、500 r/min、600 r/min、700 r/min、800 r/min、900 r/min、1 000 r/min,并分别采用文献[16]的滑模控制方法、文献[17]的模型预测方法和本文方法进行控制,同时采用转速测量仪对实际转速进行测量,并记录下对应的误差,实验结果如表2所示。
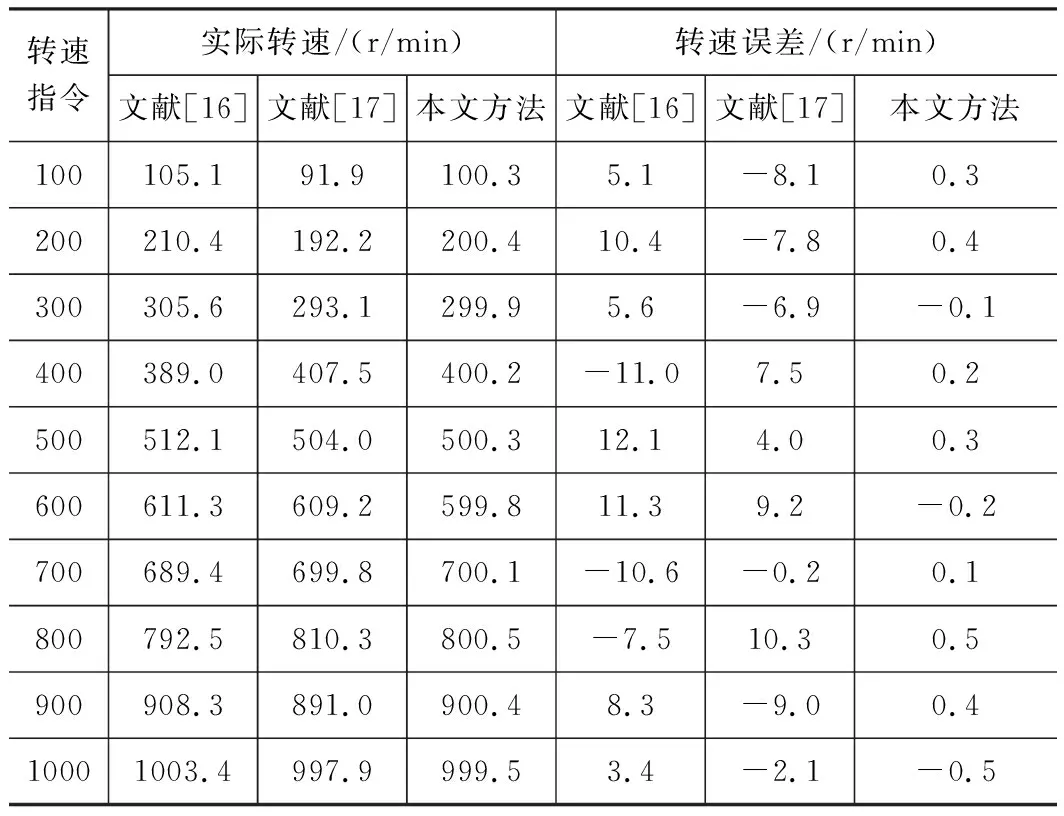
表2 实验结果
从表2的实验数据可看出:在100~1 000 r/min的转速区间,采用文献[16]滑模控制方法的最大转速误差为12.1 r/min,采用文献[17] 模型预测方法的最大转速误差仅为10.3 r/min,二者的控制精度都不高;而采用本文控制方法的误差可控制在更小的范围,最大误差仅为0.5 r/min,控制精度较高,从而验证了本文提出的方法在实际应用中的有效性。
5 结语
为了补偿阻尼摄动、负载力矩以及电磁干扰对永磁同步电机的影响,将模型预测和扩张状态观测器有效的结合,提出了一种改进模型预测控制方法。通过实验结果表明:设计的扩张状态观测器能够快速、准确估计出复合干扰的大小,最大估计误差仅为0.2 r/min2,设计的改进模型预测控制方法也能够有效补偿复合干扰的影响,快速、准确跟踪转速和加速度指令信号,最大跟踪误差范围分别为0.3 r/min和0.3 r/min2,有效提高了电机的鲁棒性和控制精度,在实际测试中的最大转速跟踪误差仅为0.5 r/min,可有效消除永磁同步电机中各种干扰的影响,控制精度和工程实用性均较高,从而大幅改善了对工件的加工精度。
猜你喜欢
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
光学精密工程(2016年3期)2016-11-07
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年11期)2014-04-04
