三维导航技术在微创经椎间孔入路腰椎椎间融合术中的应用
2021-12-18 03:53张国旺连小峰
脊柱外科杂志 2021年6期
王 鑫,张国旺,连小峰
上海市第六人民医院骨科,上海 200030
经椎间孔入路腰椎椎间融合术(TLIF)广泛应用于多种腰椎疾病的治疗。作为传统开放手术,TLIF存在肌肉剥离广泛、组织损伤大、出血量多、住院时间长和术后并发症多等缺点[1-4]。为了克服这些缺陷,微创TLIF(MIS-TLIF)开始应用于临床[5-6]。MIS-TLIF具有组织损伤小、出血量少、费用低、住院时间短等优势,且临床效果、影像学结果与传统开放TLIF相近,目前应用越来越广泛[2,4,7-9]。
但是,MIS-TLIF采用经皮技术或小切口技术,很难直视下操作,尤其在进行椎弓根置钉时,穿透椎弓根的概率较高[10-11]。计算机辅助手术系统(CAS)和影像导航系统可辅助显示术中螺钉位置和轨迹,从而大大提高了器械置入的准确性[12],增加了手术的安全性。本研究将术中三维导航技术应用于MIS-TLIF的手术过程,并与同时期采用传统透视行MIS-TLIF的病例进行比较,现报告如下。
1 资料与方法
1.1 一般资料
纳入标准:①单节段腰椎滑脱或腰椎椎管狭窄伴/不伴失稳;②临床表现为腰痛及下肢放射痛、间歇性跛行等,经非手术治疗3个月无效。排除标准:①临床症状和影像学表现不相符;②腰椎术后翻修;③腰椎感染或肿瘤;④其他慢性疾病不耐受手术。根据以上标准,纳入2016年1月—2017年12月采用MIS-TLIF治疗的腰椎退行性疾病患者64例,其中32例术中应用三维导航(A组),另32例术中采用传统C形臂X线机透视(B组)。2组患者一般资料差异无统计学意义(P>0.05,表1),所有手术均由脊柱微创手术经验丰富的同一高年资医师团队完成。

表1 患者一般情况Tab. 1 General conditions of patients
1.2 治疗方法
1.2.1 3D导航MIS-TLIF
手术在杂交手术室进行,主要设备有Zeego扫描仪(西门子公司,德国)、Medifa手术床(德中韦氏科技发展有限公司,中国)、CurveTM三维术中导航系统(Brainlab公司,德国)。
患者全身麻醉,气管插管后取俯卧位,在胸背部及臀部用宽胶布将患者连同腰桥固定在手术台上(图1a),减少术中患者移动,确保导航的准确性。消毒铺单后,在非减压侧将参考架通过2根3 mm栓子固定于髂后上棘,将无菌中单剪成两半覆盖切口部位,显露出参考架(图1b)。确定扫描范围后,所有人员离开手术室,放射科技师在手术室外操作Zeego扫描仪进行扫描(图1c),手术医师和手术室人员不需要铅板防护。扫描完成后,图像被自动传入CurveTM三维术中导航系统。进行导航棒校正后,定位手术节段。在导航系统中通过确定椎弓根螺钉的进钉路径来设计手术切口(图1d),并用无菌记号笔标记。先将CurveTM三维术中导航系统的ICM4和限深导航套筒进行注册、校准,而后,在切开皮肤、皮下及腰背筋膜并钝性分离肌肉后插入导航套筒。通过导航屏幕确定进钉点、进钉方向及螺钉长度(图1e),用电钻通过导航套筒进行开口开路,在探针探查确定钉道无误后置入螺钉。然后在导航棒的帮助下确定减压侧骨性减压的范围,放置可扩张通道,通过通道进行减压,如患者有双侧根性症状则可通过棘突根部减压至对侧。切除上、下关节突关节,摘除椎间盘组织,彻底处理椎间隙。在导航系统中通过导航棒根据椎间隙撑开高度确定融合器型号(图1f),并在椎间隙中植入碎骨及融合器。然后进行第二次透视扫描,以验证置入物位置的准确性。最后双侧螺钉装棒固定,冲洗切口,逐层缝合。减压侧酌情选用负压引流管。

图1 三维导航术中操作 Fig. 1 Three dimensional navigation intraoperative operation
1.2.2 传统X线透视下MIS-TLIF
患者全身麻醉,气管插管后取俯卧位,C形臂X线机透视手术节段椎弓根的体表投射点,确定进钉点和手术切口,然后消毒铺单。在置钉侧椎弓根位置穿刺后置入导丝,切开皮肤约1.5~2.0cm,常规扩张肌肉组织后攻丝、置钉;减压侧置入导丝后,以上、下2根导丝在皮肤间的连线做切口,一般为3.0 ~ 4.0 cm,然后同A组方式安放工作通道进行减压、处理椎间隙、置入椎间融合器,再沿2根导丝打入椎弓根螺钉,C形臂X线机扫描验证椎弓根螺钉位置的准确性,如位置不佳则予以翻修,最后双侧装棒固定,冲洗切口,逐层缝合。减压侧酌情选用负压引流管。
1.3 术后处理
术后24 h内常规预防性使用抗生素,术后24 h内拔除引流管、腰围保护下下床活动,48 h出院。
1.4 评估指标
记录并比较2组手术时间、术中出血量、术中辐射量及每枚螺钉置入时间。采用Laine等[13]的标准评价置钉准确率。采用疼痛视觉模拟量表(VAS)评分[14]、Oswestry功能障碍指数(ODI)[15]及日本骨科学会(JOA)评分[16]评价临床疗效,记录并发症发生情况。
1.5 统计学处理
采用SPSS 19.0软件对数据进行统计分析。计量资料以±s表示,组间比较采用t检验,不同时间点VAS评分、ODI比较采用重复测量方差分析;以P<0.05为差异有统计学意义。
2 结 果
所有手术顺利完成。所有患者术后随访24 ~ 48个月,平均29.5个月。A组所有患者在3D导航下手术成功,未加用C形臂X线机透视。前5例置入螺钉后即进行第二次扫描,以明确螺钉置入的准确性,即共扫描3次,后27例则共扫描2次,因此扫描次数为(2.16±0.37)次。
A组手术时间、术中出血量及每枚螺钉置入时间优于B组,而术中辐射量则高于B组,差异均有统计学意义(P<0.05,表2)。A组共置入螺钉128枚,其中8枚螺钉向外侧穿透小于2 mm,2枚螺钉(1.6%)错位或穿透2 ~ 4 mm,1枚螺钉(0.08%)完全在椎弓根外侧,经调整后位置良好,置钉准确率为97.7%(125/128);B组共置入螺钉128枚,其中9枚螺钉向外侧穿透小于2 mm,13枚螺钉(10.2%)错位或穿透2 ~ 4 mm,没有螺钉完全在椎弓根外侧,置钉准确率为89.8%;组间差异有统计学意义(P<0.05)。2组术后VAS评分、ODI及JOA评分均较术前显著改善,差异有统计学意义(P<0.05,表2);组间差异无统计学意义(P>0.05,表2)。所有患者术中、术后均无明显并发症发生。A组典型病例影像学资料见图2。
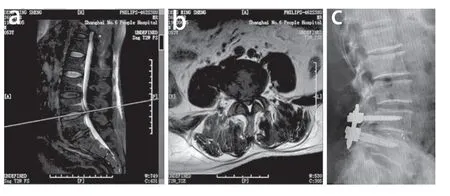
图2 A组典型病例影像学资料Fig. 2 Imaging data of a typical case in group A

表2 2组手术情况及术后疗效评价Tab. 2 Operation and postoperative efficacy evaluation of 2 groups
3 讨 论
有研究[17-18]证实,MIS-TLIF术中可减轻对椎旁肌肉的损伤,并对术后肌力恢复有积极作用。Yang等[19]的研究显示,MIS-TLIF不论是隐性出血量、可见出血量还是总出血量,均相对较少。同时,MIS-TLIF的费用相对更低,患者术后恢复正常工作的时间也更早[20]。在术后并发症方面,当术者操作足够熟练后,微创手术与开放手术的术后并发症没有显著差异[21]。由于MIS-TLIF的上述优势,其在近几年腰椎疾病的治疗中得到了广泛应用。
但是MIS-TLIF切口小,术中无法直视下辨认解剖结构,术中操作错误或螺钉穿破率较高。在没有导航的情况下椎弓根螺钉穿破率高于10%[10,22]。一项荟萃分析[23]显示,在微创手术中使用二维透视导航的螺钉穿破率为13.1%。应用了术中三维导航之后,术者可以对螺钉进行实时的虚拟成像,规划其路径,确定其长度、直径,让术者可以更加准确地置入椎弓根螺钉。本研究中A组的置钉准确率为97.6%,高于B组的89.8%。为了提高术中导航的准确性,术中须注意:①用宽胶布将患者固定在手术台上,避免术中移动;②牢固固定参考架,避免位置变动(本组1例患者的1枚钉子完全在椎弓根外的原因可能是在置钉前碰到参考架,导致参考架位置变动);③开路时建议使用电钻,不用锤子或手向患者施加压力;④在一些关键步骤,如椎间盘摘除、椎弓根开路和螺钉置入等,通过导航棒触碰解剖标志(横突)来校准;⑤发现任何异常必须重新进行扫描,然后才能进行接下来的操作。
在MIS-TLIF术中,辐射暴露是术者和手术室工作人员的关注重点[24-26]。在一篇系统的综述中,Yu等[27]指出,对于医患的辐射暴露,微创手术比开放手术要多很多。但是在MIS-TLIF中应用先进的计算机辅助成像系统能够减少对医患的辐射暴露[26]。另外,和标准的C形臂X线机透视相比,术中三维导航透视导致患者受到的辐射剂量增加,在本组病例中,A组术中进行了2次Zeego扫描仪扫描,而B组患者定位时采用普通C形臂X线机进行扫描,A组的术中辐射量明显高于B组,但两者的辐射量都明显小于1次标准的诊断性CT的辐射剂量[27-29]。如果手术医师积累足够的病例,已熟练掌握术中三维导航技术,在手术结束时可以不进行扫描验证,只需C形臂X线机透视正侧位来检查内置物位置的准确性,那么A组的辐射剂量将会小于B组,这在本组后续的病例中已得到验证。扫描时工作人员都离开手术室,所以手术医师和手术室工作人员没有辐射暴露,不需要穿铅衣,减少了医师下背部疼痛的可能性。对患者来说,术中扫描可确认螺钉位置的准确性,术后无须CT检查,也间接降低了辐射量。
术中导航的另一个重要问题是耗时。在一项尸体解剖研究中,Tabaraee等[30]论证了相对于传统的透视,O形臂iCT的安装消耗了更多时间,但置入椎弓根螺钉的耗时却较短,相加之后,与传统透视手术所需时间几乎相同。Yang等[31]报道,每个腰椎椎弓根用导航系统打入椎弓根螺钉的平均时间为3.65 min。本研究组采用导航套筒取代导丝来置入椎弓根螺钉,利用电钻开路,简化了工作流程,每枚螺钉平均置入时间为3.51 min,优于以往的研究[30-31]。另外,本组手术在杂交手术室进行,Zeego扫描仪是直接安装固定好的,与手术床配套使用,操作方便,几乎与C形臂X线机透视相差无几,因此,并不会耗费更多时间。从摆体位开始算起,三维导航MIS-TLIF的手术时间反而少于传统透视下MIS-TLIF。
本研究中A组用Zeego扫描仪进行了2次扫描,第一次是术前扫描,为导航进行准备;第二次是术后扫描,以确定内置物位置的准确性。由于Zeego扫描仪会自动移至手术部位,因此,图像捕获非常平滑,并且与常规使用的C形臂X线机相比成像时间更短。但Zeego扫描仪辐射量较大[32-33],术中必须尽量减少扫描次数。Schuetze等[34]提出,放射线暴露取决于解剖区域,而Zeego扫描仪会自动调整到解剖区域,以确保恒定的图像质量的同时降低辐射量。在脊柱手术的临床研究中,Kageyama等[35]比较了常规C形臂X线机透视组(5例)和Zeego扫描仪组(12例)之间的照射剂量和置钉角度的准确性,Zeego组的置钉精度较高,C形臂组的辐射量则较低;同时也发现,Zeego组后来的6例患者辐射时间和剂量逐渐减少,这表明Zeego扫描仪的使用存在学习曲线。此外,Kraus等[36]提出了采用Zeego扫描仪进行脊柱外科手术的低辐射暴露方案,显著降低了辐射量,并且在尸体研究中获得了良好的图像质量。因此,Zeego扫描仪在MIS-TLIF中的应用会一定程度上增加辐射剂量,但可通过学习得到改善。本研究中,Zeego扫描仪的扫描次数为(2.16±0.37)次,如果最后一次验证扫描用C形臂X线机正侧位透视来替代,势必进一步降低辐射量,这将在后续的研究中予以证实。
MIS-TLIF术中使用三维导航技术可以使椎弓根螺钉放置更加可靠,而更高的置钉准确率可以增加外科医师对使用椎弓根相关器械的信心,从而进一步缩短手术时间,减少出血量[37]。研究外科医师使用三维导航技术的学习曲线可发现,学习过程中工作流程加快,与导航相关的时间逐渐减少[38]。三维导航能够减少置钉时间,提高置钉准确性,并使整个操作流程安全顺畅,在10次左右的导航操作后,外科医师的操作即可达到标准水平[39]。必须强调的是,学习曲线是高度个体化的,任何学习曲线都会受到每位外科医师其他类型脊柱手术经验的影响,并且最有可能取决于外科医师的个人手术技术水平。
综上所述,术中三维导航系统能够有效地应用于MIS-TLIF的整个手术过程。从切口设计、椎弓根螺钉进钉点选择,到确定螺钉直径、长度与进钉方向,以及减压通道放置、减压范围确定及融合器型号的选择,都可以采用导航技术,不需要额外进行透视。术中三维导航应用于MIS-TLIF,把导航从以往的辅助置钉工具拓展成了贯穿于整个MIS-TLIF过程的术中规划手段,不仅可提高手术操作的准确性,还可使整个手术流程更加流畅。对于无法直视解剖结构的微创手术,可以做到“哪里不懂点哪里”,实现可视化操作。但本研究样本量较小,后续还需进行大样本量随机对照研究来进一步揭示三维导航在MIS-TLIF中的应用价值。
猜你喜欢
现代仪器与医疗(2021年6期)2022-01-18
太阳能(2021年5期)2021-06-03
模具制造(2019年3期)2019-06-06
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
西南军医(2016年1期)2016-01-23
现代营销·经营版(2015年3期)2015-04-20
中国医疗器械信息(2015年3期)2015-01-26
医学理论与实践(2014年17期)2014-03-06
现代营销·经营版(2013年5期)2013-05-14