DCS半实物仿真技术研究及关键技术验证
2021-12-18 08:15林克军林耀祖王乾禧
系统仿真技术 2021年3期
林克军,朱 亮,林耀祖,王乾禧
(中广核(北京)仿真技术有限公司,广东深圳 518031)
当今新建核电厂的控制系统,大多采用DCS(Distributed Control System)这种较先进的控制技术。DCS 是核电厂的“神经中枢”,对核电厂的运行发挥重要作用。在DCS 全生命周期中,DCS 仿真技术应用越来越广泛,已从以往的设计验证(控制策略验证)、测试和调试、使用培训,延伸到了系统维护和工业信息安全验证等领域,面对这些延展应用,原有DCS 仿真技术已不能满足要求,需进行进一步研究[1-3]。
DCS 常用仿真方法有三种:纯仿真、虚拟仿真和实物仿真,分别对应三个专业英文单词:Simulation、Emulation 和Stimulation,以往应用中多采用单一仿真方式,例如:控制策略验证采用纯仿真中的翻译方式,核电厂主控室操纵员的实操技能培训多采用纯仿真或虚拟仿真方式,DCS 系统静态功能测试采用实物仿真方式,而对于DCS 系统维护和工业系统信息安全验证这类应用,单一DCS 仿真方式已无法满足应用要求,例如,DCS 系统维护方案验证,需要在仿真系统中提供维修设备的安装或操作接口,而传统DCS 仿真系统不具备该类交互接口,所以,针对这些新的应用需求,需开展DCS 仿真融合技术研究,构建包含实物和虚拟仿真技术的异构系统,对目标对象进行全范围仿真,以满足其应用需求。
为了描述方便,本文选取某典型CPR1000 核电厂非安全级DCS系统作为DCS仿真的参考系统。
1 DCS半实物全范围仿真方法
在DCS 系统维护或信息安全验证应用中,采用的混合仿真方法包含实物仿真,故又称其为半实物仿真。后文为了描述方便,把纯仿真和虚拟仿真两种方式统称为虚拟仿真,除非特别说明。
1.1 虚、实仿真范围的划分
采用半实物仿真技术对DCS 系统进行全范围仿真,首先需要确定虚拟和实物仿真的边界,即哪些采用实物仿真,哪些采用虚拟仿真。
核电厂DCS 系统结构复杂,设备众多,现有CPR1000 核电厂中非安全级DCS 控制站(包含通信站)有70 多台,操作站数量有近40 台。结合应用要求和实物仿真成本,实物仿真范围的确定原则为:保证DCS 系统基本结构完整;在满足应用的前提下,实物仿真范围越小越好。由此确定的虚、实仿真的具体范围为:(1)实物仿真一两台控制站,剩余控制站采用虚拟仿真。(2)其他计算机及网络系统,采用实物仿真。
以参考DCS 系统为例,虚、实仿真范围的划分如图1所示。
图1 中,实线标识的设备及网络,采用实物仿真,虚线标识的设备(虚拟控制站),采用虚拟仿真。
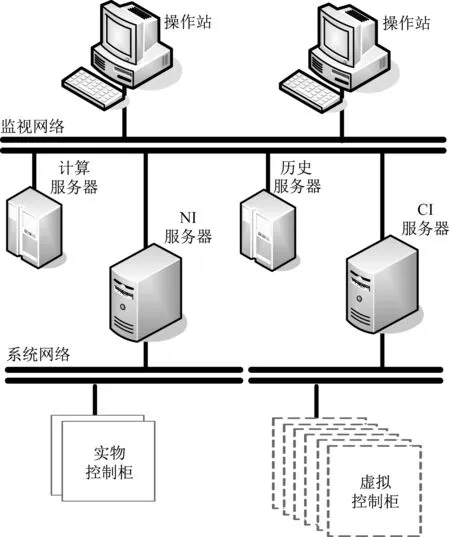
图1 虚、实仿真范围划分Fig.1 The Scope for Stimulation and non-Stimulation
1.2 DCS实物仿真
按照上述虚、实仿真范围划定方法,实物仿真的操作站设备还很多,由于不同操作站安装软件相同,功能相似,使用时可以相互代替,而且不是仿真重点关注的对象,所以对操作站的实物仿真数量进行简化,只实物仿真两台操作站,其他操作站不仿真。
实物仿真的计算机设备,其硬件设备型号和配置,尽量与实物DCS 系统相同,也可采用功能相同、性能相近的计算机设备代替。实物仿真设备中所安装和运行的软件,包括操作系统、商用工具软件及仿真应用的系统级软件,与实际系统相同。
实物系统的网络结构及通信方式,与实际DCS 系统相同。在硬件上,采用相同型号的网络设备以及传输介质;在网络IP 配置上,实物系统也与实际系统一致;在网络通信协议上,实物仿真系统内部也采用与实际系统相同的协议,该通信协议为DCS 系统内部私有协议。另外,实物系统也与实际系统一样,采用冗余结构的网络设计。
控制站实物仿真,是实物仿真的研究重点。控制站负责执行DCS 系统控制逻辑运算,在电厂设计中,通常按电厂工艺系统进行控制站配置,所以在DCS 工程系统中控制站数量较多,也是DCS 系统中最昂贵和最复杂的设备。因此,从成本考虑,实物仿真的控制站数量不能太多,通常只有一到两台,大部分控制站采用虚拟方式仿真。
实物控制站硬件设计,需具有通用性,要能对实际系统的任意(或尽量多)控制站进行实物仿真,其硬件设计的通用性,主要体现在主控模块和IO 模块的配备上。原则上,这两类模块的配备,在类型上要覆盖所有实际控制站的所有模块类型,在模块数量上,要配备所有模块类型的最小公倍数数量的模块。在针对具体应用场景时,再根据目标控制站的配置进行实物控制站配置。由于实际DCS 系统主控模块的类型不多,通常只有少数几种,每个控制站的模块数量也只有主、从两块,所以,可以按照上述原则进行主控模块配备,成本和安装都没问题。但是IO 模块的配备则大不相同,由于IO 模块分为DI/DO/AI/AO 四大类,在AI 模块又细分出热电偶类型,实际控制站IO 模块(后又称卡件)配置数量较多(如:每控制站40 块左右),不同控制站的配置数量和类型差别较大,如按照最小公倍数进行IO卡件配备,需配置的卡件数量多,成本高,而且安装接线工作量大,用户使用很不方便。所以,通常会用通信模块代替IO 模块,进行IO 信号传递,这还能节省接口IO 系统设计。通信模块,选用DCS供应商提供的可选模块,根据单个模块的通信容量和总的IO 通信负载,并预留一定裕度,来设计通信模块数量。通信模块提供工业标准通信协议,例如:Modbus等,与外部系统进行数据通信。
实物控制站的应用软件,包括两部分:平台软件和工程软件。平台软件定义控制策略的算法,工程软件定义控制策略的数据结构。实物控制站的平台软件与实际控制站相同,工程软件则在实际控制站工程软件基础上修改而成,修改内容包括:IO 信号数据类型定义(从IO 类型变更为网络通信类型)和实物系统工程配置,后续仿真功能设计还涉及对工程软件主程序中周期性计算任务的修改。
1.3 DCS虚拟仿真
虚拟仿真,实现对控制站功能的仿真,有两种可选实现方式:一是按照控制策略设计文件,利用控制逻辑组态工具软件,进行控制逻辑手工组态建模;二是直接应用或转换实际控制站的工程组态文件,利用虚拟控制站软件来运行原始或转换后的工程组态软件(组态数据)。这两种方式在以往研究中都较成熟,且有较多应用,在此不再赘述。
1.4 虚实仿真结合
虚实仿真结合技术,是把DCS 实物仿真系统与虚拟仿真系统(虚拟控制站)结合起来,形成一个异构系统,实现DCS全范围仿真。
DCS 虚拟与实物仿真系统的结合,需按照虚拟和实物系统的具体情况进行设计。本文从工程应用层面介绍DCS 虚拟和实物仿真系统的结合方法,从平台软件层面也可实现虚实结合,它涉及DCS 平台软件修改,本文不对此进行介绍。
实际DCS 系统提供通信站桥接第三方系统,利用该机制可把虚拟控制站接入实物DCS 系统,实现虚实结合。该接口通信站,一方面利用DCS 系统内部通信协议,与实物系统中的设备进行通信,另一方面以标准工业通信协议(如:Modbus TCP)与虚拟控制站系统进行通信,从而实现虚拟控制站与实物仿真系统的耦合[4]。
该接口通信站,在实际DCS 系统工程配置中无对应设备,其工程组态软件要重新设计,无法参考已有的组态进行设计,这与实物控制站工程组态软件实现方法不同。
接口通信站的工程组态软件设计要与其担当的功能对应。它不仅实现虚拟控制站与实物系统接口数据的传递,还是所有虚拟控制站在实物系统的代理,与实物系统进行交互。所以,在接口通信站中需定义所有虚拟站的数据组态,并实现与虚拟站的组态状态同步,以便通信站中的数据组态能反映虚拟站的运行状态。数据组态状态同步,会显著增大接口通信站的数据通信量,超出单个通信站的通信容量,需设计多个通信站,同时进行接口数据传递。
由于通信站与控制站允许定义的数据组态类型有差异,实际DCS系统不支持在通信站中定义IO类型的数据组态点,所以,要把虚拟站的IO 类型组态点转变为通信点类型后,再定义到该通信站中。
由于实物系统的网络配置中,只有接口通信站,没有虚拟控制站,所以要把实际系统中实物控制站与虚拟控制站所对应的控制站的站间网络通信,在实物系统中定义成与接口通信站的站间网络通信。
1.5 仿真功能
DCS 半实物仿真系统作为一种仿真系统,需具备仿真系统的通用功能,例如:时钟及时序同步,运行控制(包括:运行和冻结控制),IC(Initial Condition,初始状态)管理(包括复位和保存)等。实际DCS 系统不具备这些仿真控制功能,需要为实物仿真系统设计这些功能。
1.5.1 时钟及时序同步
核电厂通过电厂时钟系统同步时钟,时钟系统接收GPS 时钟作为母钟信号,通过电厂时钟系统分发给需要同步时钟的时间关键子系统,这些时间关键子系统各自独立运行,在运行时序上没有依赖关系。
实物系统作为半实物仿真系统的一部分,需要与仿真系统保持运行时序和时序的同步。
目前很多主流商用服务器已经集成了时间同步协议NTP(Network Time Prot. -++ocol),可用于同一网络中不同计算机之间的时钟同步,所以,在半实物仿真系统中,也可以采用这种技术进行时钟同步,选取一个中心服务器(例如:模型仿真服务器)的系统时间作为参考时间(作为母钟),利用该NTP协议,同步系统中其他服务器的系统时钟。
实物系统控制逻辑运算,是在实物控制站中周期执行的。实物系统的时序同步,主要指控制站计算周期的步调同步。
实物站的控制组态计算,通过DCS平台软件对控制页面组态文件的周期性调用来实现,所以,实物系统时序同步,可以通过控制组态页面文件的调用来实现,如:只在仿真系统处于运行状态时,才对页面组态文件进行调用,冻结状态时,不对页面组态文件进行调用。要实现调用控制,有两种可选方案,一是从系统(平台)软件层面,修改任务调度器,使其支持从(Slave)工作模式,跟踪仿真系统主调度器的节拍,来实现时序同步;二是从应用软件层面,修改调度时的执行内容,根据仿真系统的运行状态,有条件控制组态页面文件的调用[5]。仿真系统运行状态,可以通过网络通信方式获取,本文描述的方案,采用后一种方式。
1.5.2 运行控制
运行控制,是指暂停或继续仿真系统的运行,它对应仿真系统的运行、冻结等运行控制功能。前述时序同步功能,实质上已经实现了对实物系统(控制站)的运行控制,对此不再重复。
1.5.3 状态管理
状态管理,又称IC(Initial Condition)管理,它记录仿真系统计算过程的中间状态以及从中间状态恢复仿真系统运行。实际DCS 系统不具备运行状态保存和恢复功能。
实物系统状态管理,主要管理控制站运行状态。控制站运行状态,是指其中组态模块的计算状态;大部分组态模块,其输出状态可由输入接口状态唯一决定,也就是说,模块状态可由其输入接口状态决定,如果把控制站中所有组态模块作为一个整体来看,其状态可由控制站的外部输入接口信号状态决定,这些外部输入接口信号包括三类:(1)硬接线IO 信号;(2)站间网络通信信号;(3)来自L2层的操作指令信号。
实物系统状态管理,可以通过管理这些接口信号的状态来实现,而这些信号存在于虚拟控制站或工艺模型系统中,因此可通过管理这些存在于外部系统中的接口变量状态,来间接实现对实物系统的状态管理。
2 验证
由于研发条件限制,本研究未对整个技术方案进行验证,只对其中最关键的虚实仿真结合技术进行验证,具体如下。
2.1 验证方案
验证方案设计如下。
(1)利用某核电厂全范围模拟机(简称FSS)中Emulation仿真的DCS系统作为实物DCS系统。
(2)利用实物系统的77号通信站兼任接口通信站。
(3)实物系统17 号控制站改用虚拟方式仿真,用翻译方式仿真虚拟站,运行于工艺模型仿真系统中。SEN101PO 设备(泵)作为进行虚实接口验证的设备,它由17号控制站控制。
(4)利用FSS 中的工艺模型作为半实物仿真系统的工艺模型。
采用该验证方案,能很容易地将FSS 系统改造成验证系统,并能达到相同验证效果。
2.2 验证目标
通过实物系统的人机交互操作环境——操作站,能对由虚拟控制站(17号站)所控制的SEN101PO设备(泵)进行操控和监视,从而表明虚实接口工作正常。
2.3 验证原理
由实物系统操作站发出的SEN101PO 设备的操作指令(操作面板如图2 所示),经由接口通信站(77 号站),传给虚拟控制站的SEN101PO设备驱动控制模块(如图3 所示),进行控制计算后,结果指令输出给SEN101PO 设备工艺仿真模型,SEN101PO 设备模型根据控制指令进行设备仿真状态计算后,把新的设备状态反馈给虚拟控制站的设备驱动控制模块,进而通过接口通信站反馈到实物系统操作站的监视画面进行状态显示,该操控和监视过程的信号流如图4所示。

图2 SEN101PO操控界面Fig.2 SEN101PO operation HMI
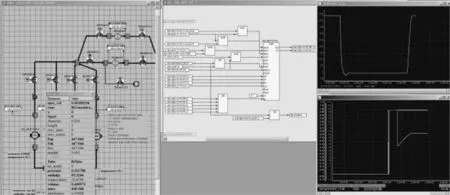
图3 SEN101PO设备及控制模型Fig.3 SEN101PO control logic

图4 SEN101PO设备操控及监视信号流Fig.4 Signal flow of SEN101PO control
2.4 验证过程及结果
点击SEN101PO 设备操作面板的ON 按钮来启动SEN101PO 泵,虚拟控制站的设备驱动模块接收到启动脉冲指令信号,SEN101PO 模型设备启动(模块图标动画显示红色),操作面板中设备状态指示启动运行(图标填充颜色变为蓝色),表示设备SEN101PO 启动控制和状态反馈正常。
点击SEN101PO设备操作面板的OFF按钮来停止SEN101PO 泵,虚拟站的控制驱动模块接收到停止脉冲指令信号,SEN101PO 模型设备停止运行(图标状态动画显示绿色),操作面板中设备运行状态指示停止运行(填充色变为白色),表明SEN101PO 设备的停运操控和状态监视正常。
由此可初步证明,虚实仿真接口的技术方案是可行的。
3 结论
本文通过对DCS 半实物仿真系统中虚、实仿真范围的划分方法设计,对DCS 实物仿真、虚拟仿真及虚实仿真接口方案介绍,以及对实物系统仿真功能实现方法的描述,阐述了一种利用DCS 半实物仿真技术进行DCS 系统全范围仿真的方法,并对其中虚实仿真结合技术进行验证,初步证明该技术是可行的。
本文介绍的内容,期望能对基于DCS 半实物仿真技术进行DCS 全范围仿真的技术研究和成果应用有所帮助。在后续的研究中还需不断深入,并伴随更多应用,得以进一步完善。
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
河北农机(2020年10期)2020-12-14
科技风(2019年31期)2019-12-05
重庆与世界(2019年10期)2019-11-25
中国电气工程学报(2019年3期)2019-09-10
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
凿岩机械气动工具(2017年2期)2017-07-19
无人机(2017年10期)2017-07-06
湖南农业(2016年3期)2016-06-05