
悬浮显示系统分析与设计
2021-12-16 08:15杨神武肖振中
液晶与显示 2021年12期
杨神武, 赵 娟, 肖振中, 孙 瑞
(1. 中国科学院 深圳先进技术研究院, 广东 深圳 518055; 2. 奥比中光科技集团股份有限公司, 广东 深圳 518057; 3. 深圳大学 物理与光电工程学院, 广东 深圳 518061)
1 引 言
近年来,通信技术的迅速发展以及人们对显示设备的展示形式和丰富度的追求,促使着显示设备向多功能和多维度方向发展。电影阿凡达、星球大战、钢铁侠等电影中的3D显示画面引起了人们对3D显示技术的广泛关注,也促进了近些年3D显示技术的迅速发展[1-6]。钢铁侠电影中的3D显示可以将图像显示在空中,并且人可跟空中的图像进行手势交互,这种无需介质承接、立体感强、人机交互方便的显示方式正是人们所追求的。
悬浮显示技术可将图像显示在空中,可在一定程度上满足人们对3D显示的需求。目前有多种方式可实现悬浮显示。据报道,有利用水雾做散射介质,然后用投影仪将图像投射在水雾上实现悬浮显示的系统[7-8],这种系统一般应用于大尺寸显示场景,但是受水雾的影响显示的图像不稳定,分辨率低。另有一种基于飞秒激光器的悬浮显示系统[9],其利用激光将空气电离并在空中进行三维扫描生成悬浮图像,但是其存在分辨率低、画面较小、安全性等问题。上述两种方法一个需要依赖介质承接图像,另一个的实现过程比较复杂,且分辨率很低。文献[10-11]介绍了一种基于逆反射结构的悬浮显示系统,其由平面显示器和逆反射膜组成。文献[12]介绍了一种基于二面角反射器的悬浮显示系统,其由平面显示器和许多个毫米尺度的二面角反射器组成。这两种方法均无需介质承接图像,可以实现彩色、高分辨率的悬浮显示效果,且易搭建实施,适用于不同场景。
虽然已有一些文献对无需介质承接的悬浮显示技术进行了介绍,但是目前仍没有文献对这种悬浮显示的技术原理做过详细的研究分析。本文将基于双目视差原理对这种悬浮显示进行详细的原理分析,研究了图像能悬浮在空中的两个关键因素:一是图像经过显示系统形成实像;二是双眼均能观看到该实像,并产生双目视差。在实验中,分别利用透镜和微反光镜阵列搭建了两个悬浮显示系统,均成功地将图像显示在空中。实验结果证实了本文的原理分析及悬浮系统的设计。
2 悬浮显示基本原理
人类感知距离和深度的因素分为生理因素和心理因素两大类。心理因素包括场景中的透视、遮挡、阴影、纹理以及自我的先验知识,生理因素包括调节(改变晶状体实现聚焦)、辐辏(调整双目注视方向)、运动视差和双目视差。其中双目视差是人类感知深度和距离最主要的因素,因为单目是无法准确感知距离的。在实际生活中,当我们闭上一只眼时,很难用手准确抓取或触碰到眼前的物体,这就是双目视差对感知距离和深度的重要性。如图1所示,同一场景在人的左右眼视网膜上所成的像是具有一定视差的,通过大脑的融合便形成了一幅具有深度的图像。目前所有的3D显示技术(包括助视3D,裸眼3D,悬浮显示,AR/VR等)展示立体图像的基本原理是让人的左右眼分别观看到具有一定视差的两幅图像,然后通过大脑的融合形成立体感。因此,若想让观看者能感知到具有深度的图像,那么双目视差是必要因素。

图1 双目视差示意图Fig.1 Schematic diagram of binocular parallax
图2为一个光学实验装置图,一根点亮的蜡烛通过透镜在70 cm处的光屏上成一个倒立的实像。当我们拿掉光屏,在装置右侧直接通过透镜观看时,依然能看到一个倒立的实像,但却感知不到实像在70 cm处,而更像是在透镜里面。

图2 透镜成实像示意图Fig.2 Schematic diagram of lens imaging

图3 透镜成实像示意图。(a)无双目视差;(b)有双目视差。Fig.3 Diagram of real image generated by lens. (a) Without binocular parallax; (b) With binocular parallax.
在上述实验中,人眼无法准确感知蜡烛像的距离,其根本原因是蜡烛所成的像没有在人的左右眼中形成双目视差,所以无法准确判断其距离。如图3(a)所示,一个箭头通过一个透镜形成实像,在空间中形成了一个可观看到完整实像的区域(图中黄色区域)。由于这个区域很小,考虑到人类双眼的瞳距,因此图中黄色区域只能容纳单眼观看到该实像,另一只眼通过透镜是观看不到完整像的,此时蜡烛的像和透镜在左右眼视网膜上所成的像无法形成双目视差,因而我们无法感知到实像离透镜的准确距离。若调整上述系统的后焦,控制透镜所成实像的大小,如图3(b)所示,使系统形成一个缩小的实像,则可观看到完整实像的区域会增大,可保证双眼均能通过透镜观看到实像,此时实像和透镜在左右眼视网膜上所成的像形成了双目视差,经过大脑融合便能感知到蜡烛像离透镜的准确距离。

图4 基于透镜的悬浮显示Fig.4 Floating display based on lens
图4为本文用一个焦距为75 mm的镜头做的光学实验,此时左眼和右眼通过透镜都能看到实像,其中透镜作为背景,五角星作为前景,在左右眼视网膜上形成的像具有了视差,两幅图像经过大脑融合后形成立体感,感知到图像悬浮在空中。由于文中所示图片为2D形式,无法体现图像悬浮在空中的效果,感兴趣的读者可以拿一个透镜复现该实验,调整透镜的后焦让系统成一个缩小的实像,且保证左右眼都能观看到该实像,此时应能观看到一个悬浮在空中的图像。如果用一个经过设计的远心透镜组,该透镜实验的效果更优,原因是远心透镜所形成的可观看到完整实像的区域会较大,比较容易满足双目视差的条件。
综上分析,一个系统能显示悬浮图像的核心可总结为两点:一是图像源(实物、2D或3D图像)通过光学系统形成实像;二是我们的双眼通过该光学系统均能观看到该实像,形成双目视差。

图5 (a)点光源经过微反光镜阵列示意图;(b)两层微反光镜示意图;(c)物体经过微反光镜阵列示意图。Fig.5 (a) Diagram of a point source passes through micro lens array ;(b) Diagram of two-layer micro mirrors; (c) Diagram of an object passes through micro lens array.
根据上述分析,实现悬浮显示的第一要点是形成实像,除了透镜还有其他的光学系统能够满足这一要求,这里介绍一种基于微反光镜阵列的悬浮显示系统。图5(a)所示为一个点物通过一组微反光镜阵列后汇聚成一个点像的光路示意图,这里的微反光镜阵列由多个微反光镜沿竖直方向排列而成,图中d表示微反光镜的宽度,p表示两个反光面的间距。一个微反光镜阵列只能在一个方向聚光,若将两组微反光镜阵列相互正交地上下叠放在一起,则形成的器件可在两个方向聚光。图5(b)为两个相互正交的反光镜阵列形成的显示单元,图中画斜线部分为反光面,若下面一层的微反光镜对x方向的光线进行汇聚,则上面一层的微反光镜对y方向的光线进行汇聚,z方向分量保持不变,一个这样的显示单元可汇聚一个方向的光线,多个单元则可汇聚多个角度的光线。图5(c)为一个实物通过微反光镜阵列形成实像的示意图,其光路类似于一个远心镜头,该系统形成的可观看到完整图像的区域较大,能保证双眼都能观看到实像,因此较易形成双目视差。文中为了简化分析过程,在图5(a)、(c)中仅用一维(单层)结构进行了原理分析,但这种分析不失一般性。两层微反光镜阵列是以正交的形式摆放的,每层微反光镜对光线的反射是相互独立的。该系统可以满足悬浮显示技术的两个条件:成实像和形成双目视差。因此理论上可以将图像显示在空中。微反光镜阵列相较透镜的优势在于没有像差的影响,但是会存在杂散光的影响,因为有一部分光线会直接透过微反光镜阵列中间的空隙,而不会被反光镜反射,这些光线有可能直接进入人眼形成重影像。由图5(c)中的几何关系易知,图像源的尺寸t、微反光镜阵列的尺寸w、图像出屏距离D、观看角度θ之间的关系可由式(1)表示:
(1)
由式(1)可知,当微反光镜阵列和图像源的尺寸固定时,图像的出屏距离与视场角成反比关系。

图6 基于微反光镜阵列的悬浮显示仿真分析结果。(a)有杂散光进入人眼;(b)无杂散光进入人眼。Fig.6 Simulation results of floating display using micro mirror array. (a) Stray light enters the human eyes; (b) No stray light enters the human eyes.
为了验证微反光镜阵列的可行性,本文利用Tracepro仿真软件对其进行了仿真分析。图6(a)为一个点光源通过微反光镜阵列后形成点像的仿真图,从光路图可以看出,从光源出射的大部分光线都汇聚在了一点,证明了该器件可以满足成实像的功能,但从图中也可以看出仍存在一些光线直接透过了微反光镜阵列,没有被反射,因此这部分光可能会直接进入人眼,形成杂散光。从照度图中也可看出此时的能量分布不够集中。为了使直接透过微反光镜阵列空隙的光线不进入人眼,我们将图像源与微反光镜阵列成45°角摆放,如图6(b)所示,此时透过空隙的光线向上传播,从光路图上可以看出传输到系统右侧的杂散光几乎没有了,从照度图上可以看出能量分布也更加集中(选取了单个光源)。从光路图中可以看出,该器件的光学性能类似一个远心透镜,因此形成的可观看到完整实像的区域会较大,使双眼都能观看到实像,形成双目视差。由反光镜的特性易知,悬浮图像远离屏幕的距离等于图像源离微反光镜阵列的距离,图6的仿真结果也验证了这一点。
微反光镜具有一定的宽度d,因此被其反射的是一束光线而不是一根光线,如图7所示,点光源经过微反光镜之后形成一个斑,那么在空间中汇聚的实像的分辨率相较原图像会下降。从图中的几何关系易知,一个点光源经过宽度为d的反光镜之后在空间中的像的宽度增大为2d,则此时分辨率为1/2d。
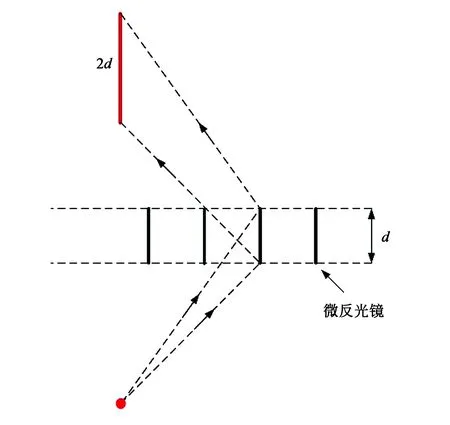
图7 悬浮图像分辨率与微反光镜的关系Fig.7 Relationship between micro lens array and the resolution of floating image
3 实验与结果
为了验证上述介绍的悬浮显示原理分析及悬浮系统,我们设计了一个由两层微反光镜阵列上下正交排布而成的微反光镜阵列 (MMA),设计结构如图8所示,其中d=1.0 mm,p=0.7 mm。制作MMA器件有多种方法,一种是先加工多个微型反光镜,然后将多个反光镜拼成一个反光镜阵列,这种方法在制作单个反光镜时比较简单,但是若要拼成一个面积较大的反光镜阵列则工作量非常大,不利于产品化生产。另一种方法是先多层堆叠再切割的方案,流程如图9所示。第一步准备平板玻璃,数量取决于要制作的反光镜阵列的面积;第二步将这些平板玻璃的两个表面分别镀上反光膜(反射率>90%@λ=420~700 nm);第三步将上述镀完膜的玻璃粘合在一起,粘合的层数取决于反光镜阵列的面积;第四步沿横截面以一定的步长进行切割,得到多个微反光镜阵列,切割线如图中红色虚线所示;第五步将两个微反光镜阵列上下正交摆放并粘合得到MMA器件。这里玻璃的厚度为(0.7±0.01) mm,切割间距为(1.0±0.02) mm。

图8 MMA设计结构。(a)侧视图;(b)俯视图。Fig.8 Structure diagram of MMA. (a) Side view; (b) Top view.
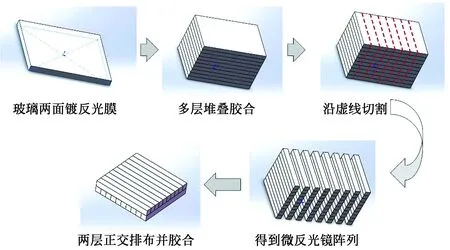
图9 微反光镜阵列加工流程图Fig.9 Processing flow chart of the micro mirror array
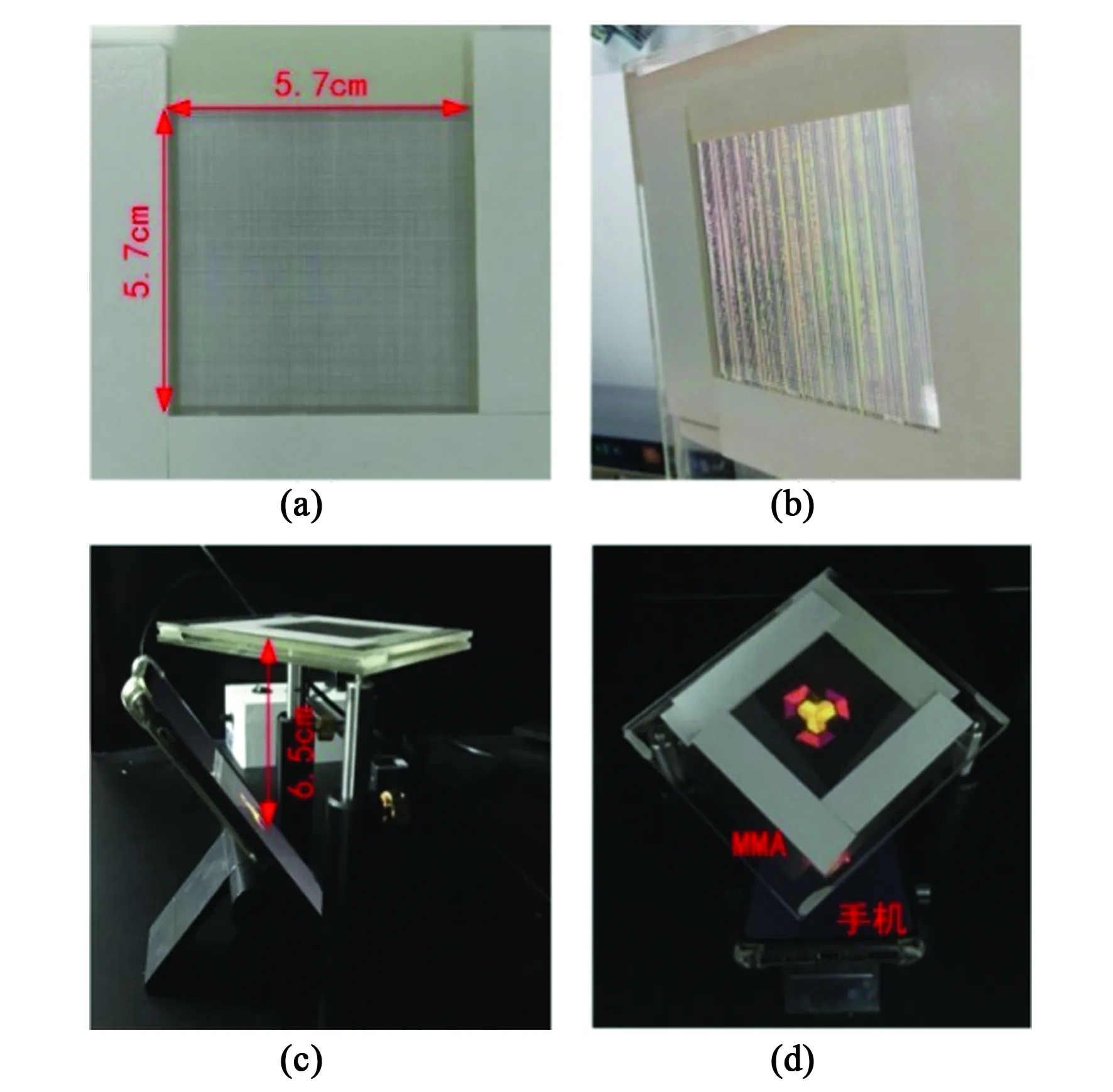
图10 (a)MMA器件俯视图;(b)MMA器件侧视图;(c)悬浮显示系统侧视图;(d)悬浮显示系统俯视。Fig.10 (a) Top view of MMA; (b) Side view of MMA; (c) Side view of floating display system; (d) Top view of floating display system.
图10(a)、(b)为按照上述加工流程制作而成的MMA器件实物图,尺寸为5.7 cm×5.7 cm。图10(b)为从侧面拍摄的效果图,图中有颜色变化的部分表示反光面,有些部分由于切割时膜层被损坏导致存在暗色区域。图10(c)、(d)为基于MMA器件搭建而成的悬浮显示系统。我们采用手机作为图像源显示2D图像,将手机和MMA器件成45°摆放,将像源和微反光镜阵列成一定角度摆放是为了让直接透过微反光镜阵列的光线不进入人眼,具体到45°是为了装配及观看的方便。从图6(b)中可以看出,当图像源(水平放置)和微反光镜阵列成45°放置时,形成的虚拟图像是竖直的,此时观看者可在右侧直接观看正立的图像。手机中心离MMA的距离为6.5 cm,该系统显示的悬浮图像离MMA的距离也是6.5 cm(离屏距离)。理论上图像源离MMA的距离越远,图像的出屏距离越大,但是根据图5(c)所示光路及公式(1)可知,当MMA尺寸和图像源尺寸固定时,随着成像距离的增大,能观看到完整图像的区域会缩小,因此在实际搭建系统时需综合考虑,图像源的尺寸为2.2 cm×2.2 cm,当设定出屏距离为6.5 cm时,根据式(1)可计算出观看角度为30°,能充分保证双眼都能观看到该图像。

图11 (a)直接透过的光线;(b)经过一次反射的光线;(c)经过两次反射的光线。Fig.11 (a) Light rays pass through the MMA; (b) Light rays reflected once by MMA; (c) Light rays reflected twice by MMA.
从图像源出射的光线经过微反镜阵列后会产生直接透过、一次反射、二次反射、3次反射等光线。只有经过二次反射产生的光线能够形成悬浮图像,如图11(c)所示,其他光线会产生鬼像。其中直接透过微反光镜阵列的光线如果进入人眼,那么看到的就是显示屏上的图像,如图11(a)所示。仅经过一次反射的光线因为只被第一层或第二层的微反光镜阵列反射,因此无法形成悬浮图像,这部分杂散光会形成镜像,类似一幅图被镜子反射而形成的虚像,但因为这里有许多个微反光镜,因此最终的镜像是由许多个微反光镜形成的虚像拼接而成的,如图11(b)所示。经过3次反射的光线意味着其被某一层微反光镜阵列反射了两次,而被另一层反光镜阵列反射了一次,由反光镜的特性易知,被反射偶数次的光线的方向不会改变,因此这种杂散光类似仅经过一次反射的光线,会形成一个由许多个微反光镜形成的虚像拼接而成的镜像。
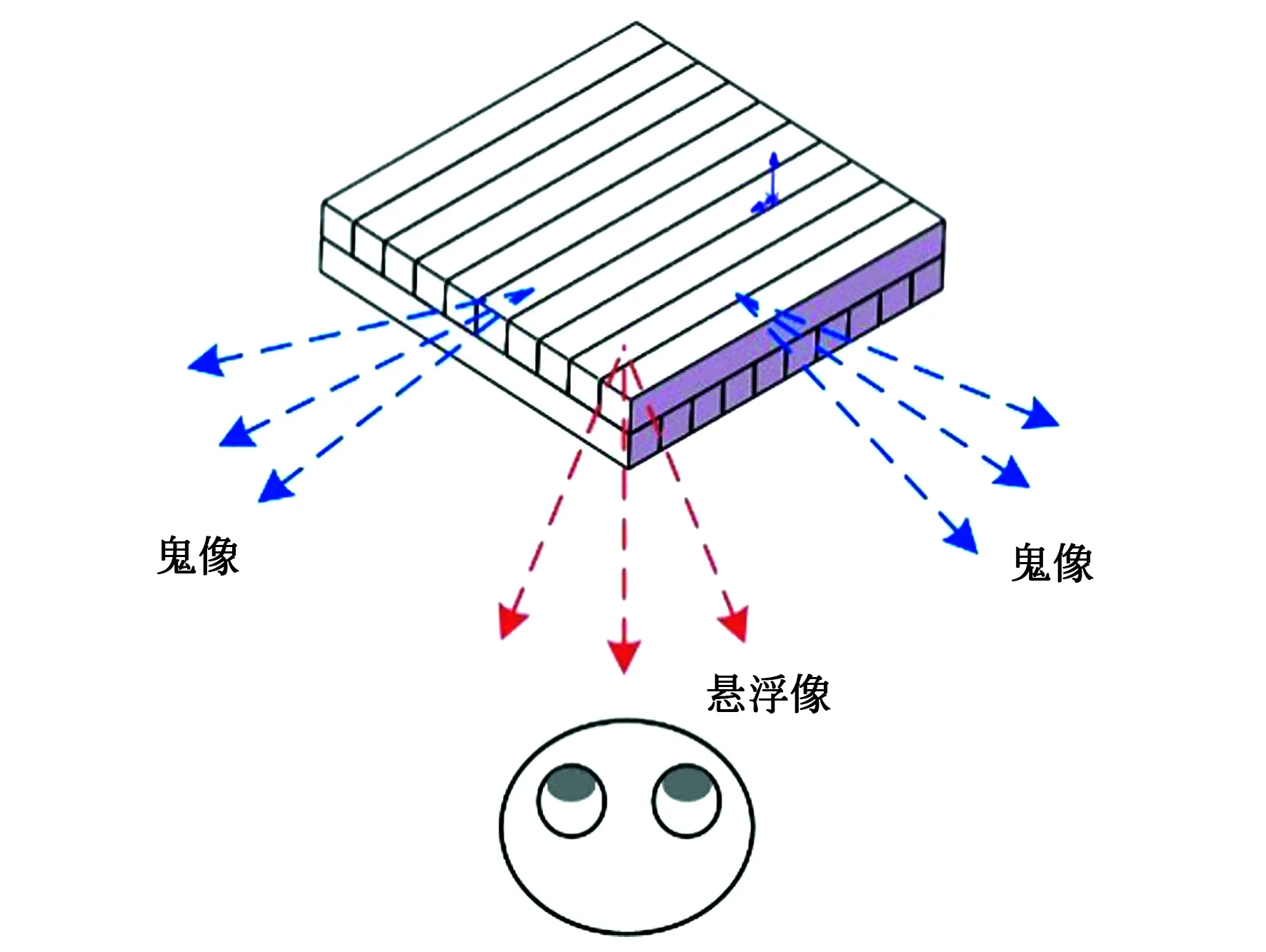
图12 悬浮像和鬼像的光线示意图Fig.12 Diagram of light rays of the floating image and ghost image
直接透过微反光镜阵列的光线可通过将图像源和MMA成45°摆放使其不会进入观看者的眼睛。经过一次反射和三次反射形成的鬼像可通过调整MMA与观看者的角度避免进入人眼,如图12所示,每层微反光镜阵列都会形成一个鬼像,且形成鬼像的光线方向与反光镜的法线方向一致,因此可旋转MMA使其对角线方向与观看方向一致,此时形成的鬼像将与悬浮像分离,观看者仅能观看到悬浮图像。
从不同观察位置拍摄的悬浮显示效果如图13所示,虽然2D的展示方式不能很好地体现图像的悬浮效果,但从视频中还是可以看出图像显示在空中,实现了悬浮的效果。

图13 悬浮显示结果。(a)左视图;(b)中间视图;(c)右视图。Fig.13 Result of the floating display. (a) Left view; (b) Middle view; (c) Right view.
4 结 论
本文根据人们对强立体感显示技术的要求,介绍了几种悬浮显示技术,并针对无介质承接的悬浮显示技术进行了研究。分析了实现无介质承接悬浮显示的两个关键因素:一是图像经过显示系统形成实像;二是双眼均能看到该实像,并产生双目视差。为了验证本文的分析,分别利用透镜和微反光镜阵列搭建了两个悬浮显示系统。实验结果证明:显示系统成功将图像显示在空中,无需介质承接,离屏距离大于6.5 cm。本文对悬浮显示技术两个关键因素的分析对悬浮显示系统的设计具有指导参考意义,任何能形成实像和双目视差的系统,均能将图像显示在空中,不仅限于文中介绍的几种显示系统。
猜你喜欢
诗歌月刊(2022年2期)2022-03-15
小型微型计算机系统(2022年1期)2022-01-21
电子制作(2019年20期)2019-12-04
测控技术(2018年4期)2018-11-25
天津大学学报(自然科学与工程技术版)(2018年6期)2018-05-30
现代计算机(2016年3期)2016-09-23
现代计算机(2016年11期)2016-02-28
西部广播电视(2015年5期)2016-01-16
第二课堂(课外活动版)(2015年3期)2015-10-21
空间控制技术与应用(2010年3期)2010-12-23
