
基于线结构光和优化PID 的压电柔性机械臂振动控制
2021-12-14 02:07马天兵王芳芳
光学精密工程 2021年11期
马天兵 ,宫 晗 ,杜 菲 *,王芳芳 ,陈 凯
(1. 安徽理工大学深部煤矿采动响应与灾害防控国家重点实验室,安徽淮南232001;2. 安徽理工大学 机械工程学院,安徽 淮南 232001)
1 引 言
随着材料和科学技术的进步,工程领域正在推出重量轻、体积小、性能高的产品,使得机器人系统更加智能化。追求更紧凑、更柔性的结构使得系统具有更大的灵活性的同时也带来了棘手的控制问题。
常用的接触式测量方法实现振动测量的过程须始终保持传感器与被测物接触,改变了被测物的结构特性,给测量结果造成了一定的误差,且无法实现多点同时测量。非接触式测量方法恰好弥补了这一缺陷,伴随着计算机和图像处理技术的发展,机器视觉技术在振动检测中的应用也越来越普遍。徐秀秀等[1]设计了一种基于机器视觉的柔性臂振动测量系统,实现了柔性臂的振动位移检测。徐超等[2]将视觉测量法运用于大柔性结构的振动测量之中,取得了较好的测量效果。邱志成等[3-4]利用双目视觉获得其柔性板振动信息,提出了一种新型线结构光视觉系统标定方法实现了柔性臂的测振。彭聪等[5]将基于视频相位的振动测量方法与双目立体视觉相结合,设计了一种基于机器视觉的三维测振方法,并利用该方法对悬臂梁进行了振动位移检测。然而上述基于单目相机的视觉检测无法获得物体表面的三维信息,双目立体视觉检测在被测物表面特征不明显时使用受到限制。
在振动控制系统中,控制策略是控制的关键[6-7]。PID 控制算法以其原理简单、适应性强和可靠性高在运动控制领域得到广泛运用,PID 控制器的好坏在于控制参数的选择,常规PID 参数整定方法有经验法和响应曲线法等,然而使用这类方法进行参数的整定,其整定过程繁杂且精度不高。后来研究学者们为提高控制器参数整定精度和效率,又发展了一系列智能参数整定方法。曹青松等[8]利用模糊自整定PID 算法对两自由度压电柔性机械臂的振动进行了主动控制研究。张娟等[9]利用改进的遗传算法对压电片位置、长度及PID 控制器参数进行了优化选取。改进的PID 算法不仅操作方便,效率高,还提升了系统整体控制性能。
综上,本文以刚柔双关节机械臂作为研究对象,设计基于线结构光和优化PID 的振动控制系统。首先搭建线结构光视觉测振系统并对其进行可行性与准确性验证;然后利用细菌觅食算法对PID 控制器进行参数优化;最后设计实验对控制算法的控制效果加以验证。提出的新方法可实现强干扰背景下柔性臂振动位移的视觉特征有效提取和高效控制。
2 控制实验系统
2.1 系统构成
图1 所示为整个控制系统的构成示意图。两臂杆在电机驱动下运动,相机与线激光器构成的线结构光视觉系统获取柔性臂末端实时振动位移,并将其作为优化后PID 控制器的输入,控制器输出信号由数据输出卡输出经功率放大器的放大作用于压电作动片,实现柔性臂的振动主动控制。
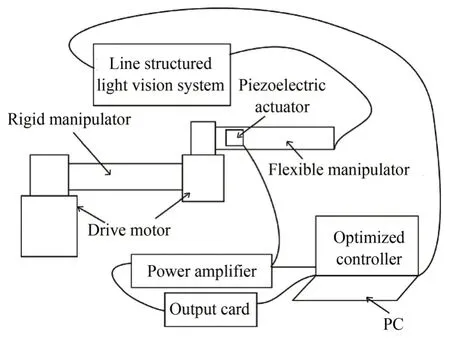
图1 主动控制系统装置示意图Fig.1 Diagram of active control system device
2.2 实验装置
图2 为控制系统的装置实物图。柔性臂为长300 mm,截面尺寸为15 mm×1 mm 的不锈钢材料,对应驱动电机型号为J-4218HB2403 的步进电机(下文记作小电机);刚性臂为长200 mm,截面尺寸为15 mm×6 mm 的碳钢材料,对应驱动电机型号为J-5718HB3401 的步进电机(下文记作大电机);电控箱中配有电源以及步进电机的控制器与驱动器;压电作动片选择22 mm×19.5 mm 的压电陶瓷单晶片,极板面积为18 mm×18 mm,压电常数d31=220×10-12C/N,两表面极板间距离d=0.2 mm,粘贴于柔性臂根部;数据输出卡型号为USB-6003,电压输出在-10 V~10 V 的范围内;功率放大器型号为HVD-300D;相机选择Imaging Source 公司的DMK33G618 CCD 相机,分辨率为640×480,最高帧率为120 Hz,镜头焦距为16 mm;线激光器采用型号为HW650AB100-16GD-WLD 的红光一字线激光器。选择一块轻质泡沫板作为目标平面,并将其设置在柔性臂末端位置处(目标平面的设计后文会具体介绍),线激光器和工业相机分别布置在小电机关节左右两侧,且保证相机光轴与激光器中心轴线的交点基本位于泡沫板中心。
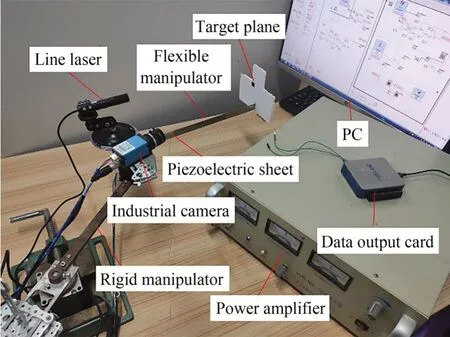
图2 柔性臂振动主动控制系统照片Fig.2 Physical photo of active vibration control system for flexible manipulator
3 测振系统数学模型与标定
3.1 线结构光视觉模型
线结构光三维测量系统主要由计算机、工业相机、线激光器、被测对象组成。其基本工作原理如图3 所示。激光发射器打出激光平面并在目标平面上形成激光条纹,激光条纹通过相机拍摄在相机的感光平面上成像,通过计算机提取激光条纹的中心像素坐标,再结合线结构光视觉系统模型,将其转换为三维坐标,完成特征点的三维重建。
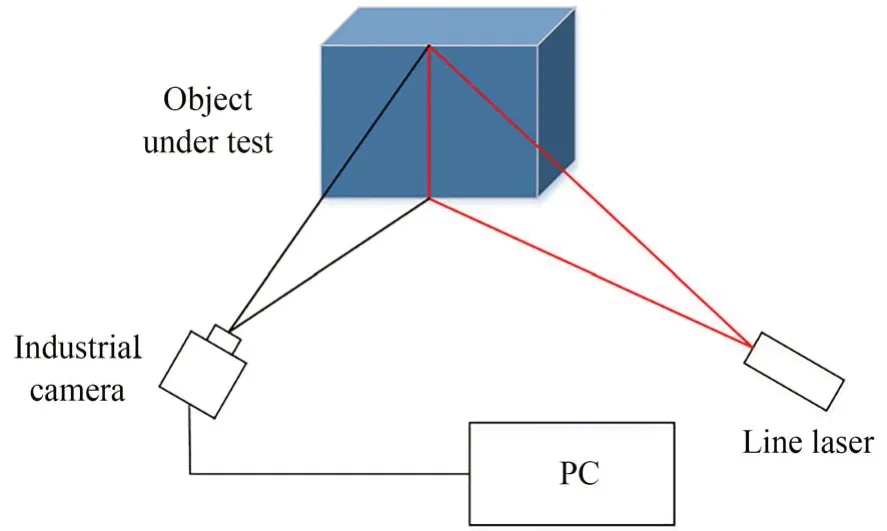
图3 线结构光视觉系统组成Fig.3 The composition of line structured light vision sys⁃tem
在相机模型中,存在三大坐标系,分别为图像坐标系O1-XY、相机坐标系O-XcYcZc及世界坐标系Ow-XwYw Zw。空间中任一点的世界坐标 (Xw,Yw,Zw)、相机坐标 (Xc,Yc,Zc)及其成像点的像素坐标(u,v)之间存在如下关系:
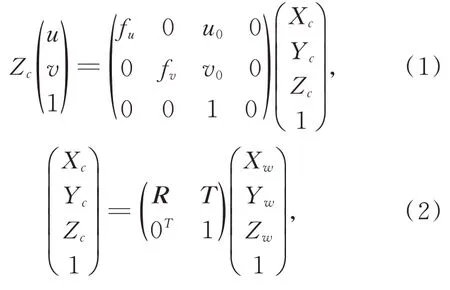
其中:(fu,fv)为归一化焦距,(u0,v0)为图像平面上主点坐标,R和T分别为旋转矩阵和平移向量。
激光平面模型即为其在相机坐标系下的平面方程表达式,记作:

其中:A,B,C,D为拟合光平面系数。当相机模型和激光平面模型确定,并已知某点的像素坐标,联立式(1)、式(3),便可得到该点在相机坐标系下的三维坐标,完成其三维重建。
3.2 标定原理
线结构光视觉系统标定包括相机标定和线结构光平面标定两部分。张正友[10]提出利用平面棋盘格进行相机标定,精度高、鲁棒性好、应用广,本文采用该方法进行相机标定。本文利用文献[11]提出的方法进行线结构光平面标定。该方法标定原理为:首先提取光条直线特征点,利用其在归一化图像平面内的投影点在相机坐标系下的坐标值,计算出过相机光心和特征点所在直线方程;然后根据棋盘靶标的特点计算该靶标平面在相机坐标系下的方程;接着利用上述直线方程和平面方程,得到特征点在相机坐标系下的坐标值,同理可获得光条直线上所有特征点坐标值;最后通过多次调整标定板位姿,获取不同光条特征点坐标,并利用最小二乘法对所有特征点进行平面拟合得到光平面方程。
标定图像采集过程如下:
(1)将棋盘格标定板放置在柔性臂末端处,保证相机和激光器相对位置不变。调节相机镜头的焦距和光圈,使棋盘格在相机视场内清晰成像,此时固定镜头焦距和光圈;
(2)打开激光器,使激光条纹落在棋盘格一侧黑色区域,拍摄一张标定图像;
(3)关闭激光器,保持棋盘格标定板位置不变,拍摄一张标定图像;
(4)调整棋盘格标定板位姿,重复步骤(2)和(3),依次拍摄4 组标定图像。至此,用于激光平面标定的图像采集完毕,共5 张标定图像;
(5)保持激光器始终关闭,依次调整棋盘格标定板位姿,并拍摄14 张标定图像。至此,用于相机标定的图像采集完毕,共19 张标定图像。
4 基于细菌觅食的PID 控制器设计
PID[12]作为一种被普遍采用的控制方法,将被控对象的实时响应与给定目标值的偏差e(t)作为控制器的输入,然后将偏差的比例、积分和微分通过线性组合构成控制量u(t),其控制规律为:

其中:kp,ki,kd分别表示控制器的比例系数,积分系数及微分系数,均为可调节量。
细菌觅食优化算法(Bacteria Foraging Opti⁃mization Algorithm,BFOA)[13]是 由 Passino 于2002 年通过模拟人类大肠杆菌觅食行为提出的一种新的群体智能优化算法。大肠杆菌觅食过程实质就是在其自身生理和外在环境约束下进行移动使获得能量最大化的一种行为。细菌主要通过趋向性操作、聚集性操作、复制操作和迁徙操作来完成觅食行为。
为得到柔性臂振动控制系统中最优的PID控制器,利用上述智能算法对其进行参数优化。
具体优化步骤如下:
(1)设计PID 控制器仿真控制系统,将被控对象的实时响应与给定目标值的偏差绝对值之和作为函数适应度;
(2)用 PID 控制器参数kp,ki,kd表示细菌个体位置,并随机初始化种群中各细菌的位置;
(3)进行控制仿真,计算初始位置细菌的适应度J,并将当前细菌的适应度保存为Jlast;
(4)对每个细菌进行趋向、聚集、复制和迁徙操作,得到新的kp,ki,kd,再次进行控制仿真得到新位置细菌的适应度J,并根据判断条件及时更新Jlast;
(5)判断是否达到最大迭代次数,若是,终止迭代,输出最优解,否则重复步骤(4)。
5 控制器参数仿真
5.1 模态参数获取
为了完成PID 控制器参数的优化,需要构建柔性双关节机械臂的振动控制仿真系统,系统包括PID 控制器、目标函数、状态方程及激励响应,在电机驱动下,柔性臂杆产生振动响应,响应与目标函数的差值作为控制器输入,控制器输出控制柔性臂杆。其中,电机激励下的柔性臂杆响应模型,利用拉格朗日方程及假定模态法建立,并考虑关节柔性进行模型修正[14],模型中参数采用实验平台参数进行设置,得到模型的电机激励响应结果如图4 所示。
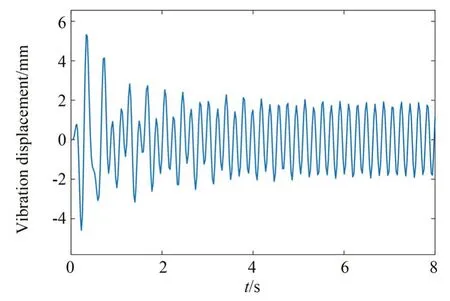
图4 电机激励响应Fig.4 Response of motors to excitation
将柔性臂近似为悬臂梁结构,其状态空间方程为:

其中:K,M,C为系统的固有属性,依次为模态刚度、模态质量、模态阻尼;δ为力因子;u为系统的输入向量,即控制电压;X为系统的输出矩阵,即振动位移。
若仅考虑系统的一阶振动模态,k、m、c之间的关系可表示为:
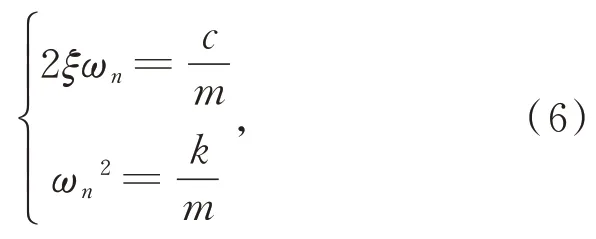
其中:ξ为阻尼比,ωn为一阶固有频率。
根据上述公式可知,柔性臂杆的状态方程,可通过结构阻尼比以及固有频率进行求解,而阻尼比以及固有频率,可利用扫频激励实验进行获取。利用上节测振系统,实验中信号发生器设置输出时间为8 s、频率范围为1~10 Hz 的正弦扫频信号,测振程序采样频率设置为90 Hz,振动位移测量结果如图5 所示。对振动位移进行频谱分析,结果如图6 所示。
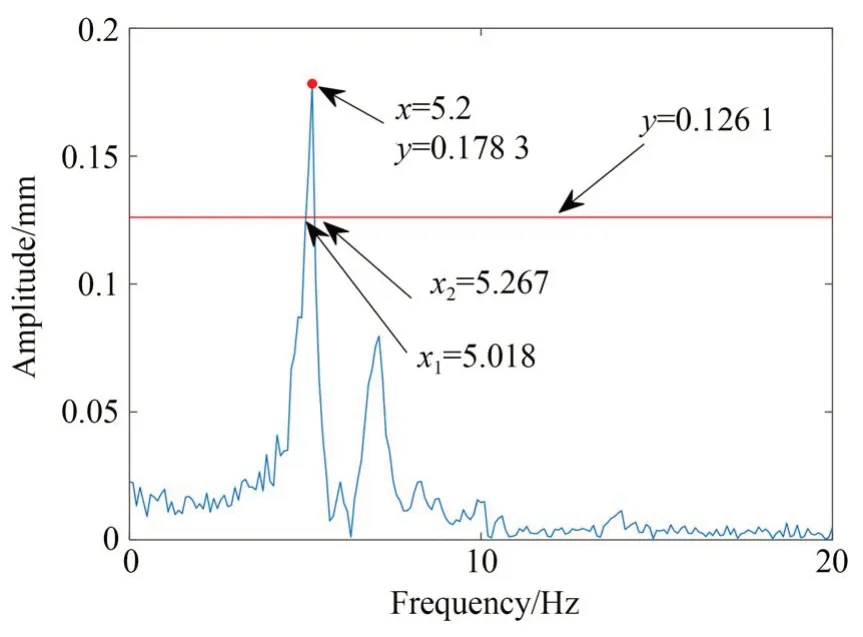
图6 响应曲线频谱结果Fig.6 Spectrum results of response curve
由图6 可知,系统的峰值频率f=5.2 Hz,故其 固 有 频 率ωn=2πf=32.673 Hz;y=0.126 1为过频谱曲线峰值倍的一条水平直线,该直线与频谱曲线相交于两点,对应频率分别为f1=5.018 Hz,f2=5.267 Hz。由半功率带宽法求得系统阻尼比:

已知ωn和ξ,现只需确定 -δM-1的值即可获得系统的状态空间方程。这里将实验结果与仿真结果进行对比求取-δM-1,不断调整参数,最终确定当-δM-1的值为1.2 时,仿真系统输出与实验响应一致。综合上述实验结果及公式(6),最终得到其空间状态方程为:

5.2 仿真控制结果
利用MATLAB 中m 文件编写细菌觅食算法和适应度函数,细菌觅食算法各参数依次设置如下:种群搜索范围bounds=[0,10;0,10;0,10];细菌个数s=26,趋化次数Nc=50,趋向操作单向运动最大步数Ns=4,复制次数Nre=4,迁徙次数Ned=2,迁徙概率Ped=0.25。细菌每游动一步得到一组新的kp,ki,kd,在适应度函数中代入新的细菌位置并运行仿真控制程序,得到控制误差,将整个控制过程的控制误差绝对值的和作为适应度值。
待算法运行结束,细菌完成觅食,输出最优的细菌位置,即最优的PID 控制器参数,此时细菌最优状态为[8.423,5.042,9.489]。在仿真控制程序中,PID 控制器采用最优的控制参数,运行程序,得到控制前后的振动响应如图7 所示。
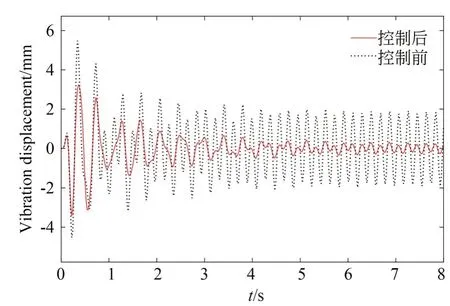
图7 优化参数的仿真实验结果Fig.7 Simulation experiment results of optimizing param⁃eters
从图7 可以看出,采用细菌觅食算法优化得到的PID 控制器参数,进行振动控制仿真,控制效果明显。为了进一步体现细菌觅食算法优化PID控制器的优越性,选择经验法进行PID 控制器参数整定与之对比。经验法整定PID 控制器参数核心思想为:给控制系统施加一个单位阶跃信号作为输入,在给定控制器参数范围内反复调节参数大小,使最终系统响应为曲线的第一个波峰与第二个波峰比值为4:1 的理想曲线即可。与细菌觅食算法一致,经验法中控制器参数范围同样设定为 0 ≤kp≤ 10,0 ≤ki≤ 10,0 ≤kd≤ 10,通 过 反复调试,当 PID 控制器参数kp,ki,kd取值依次为5.4,1.2,9.2 时,系统响应曲线如图 8 所示,由图可知曲线前后两峰波峰值比为4.09:1,系统对单位阶跃信号的响应近似理想曲线。将上述利用经验法整定的控制器参数代入仿真控制系统中,运行程序,得到控制前后效果如图9 所示。
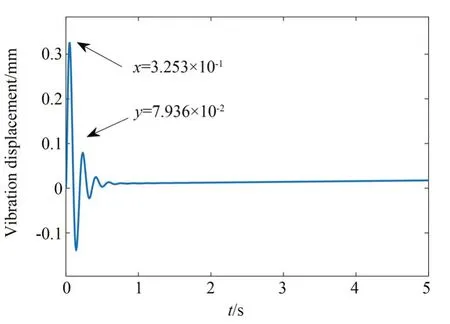
图8 经验整定法响应曲线Fig.8 Response curve based on empirical setting method
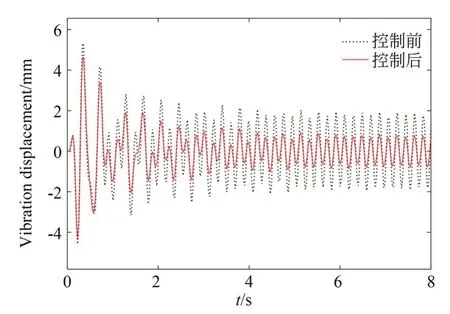
图9 整定参数的仿真实验结果Fig.9 Simulation experiment results of setting parame⁃ters
综上,针对PID 控制器参数整定,细菌觅食算法对比经验法:一方面,对比图7 和图9 可知,前者振动控制效果更好;另一方面,针对不同的PID 控制系统,细菌觅食算法可进行算法移植,避免代码重复编写,而经验法还需重新反复调整参数以达到理想波形,前者优化过程更加智能、简便。
6 实验结果
6.1 标定实验与结果
相机标定即确定相机内外参数的过程,本文借鉴张正友提出的相机标定方法,选择MAT⁃LAB 相机标定工具箱进行相机标定。利用3.2节得到的标定图像进行相机标定,标定结果如表1 所示。

表1 柔性臂测振相机标定结果Tab.1 Camera calibration results for vibration testing of flexible manipulator
完成相机标定后,利用MATLAB 软件编写线结构光平面标定程序,标定流程依次为获取相机标定结果、图像畸变校正、ROI 提取、灰度重心法提取光条特征点、像素坐标转三维相机坐标及最小二乘法拟合光平面。
以其中一张光平面标定图像为例,如图10 所示,为其图像处理过程。从图10(b)中可以看出,红色的拟合线段和激光条纹基本重合,说明灰度重心法提取光条特征点的精度较高。

图10 标定图片处理效果图Fig.10 Effect diagram of calibration image processing
经过光平面标定,得到激光平面方程为:

联立式(1)、式(9),并结合相机标定结果得到线结构光视觉测振系统数学模型为:
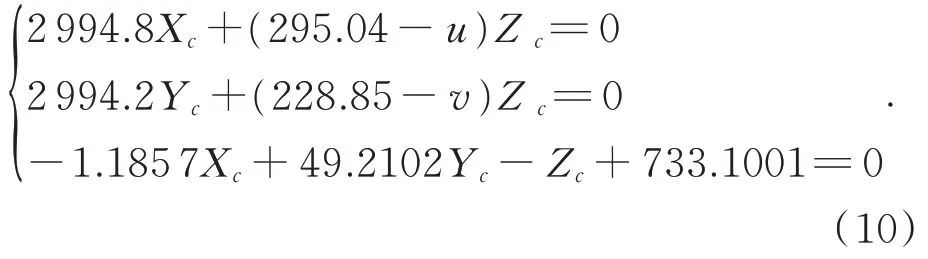
由式(10)可知,在线结构视觉系统数学模型中,若已知图像上某点的像素坐标,可求得该点在相机坐标系下的三维坐标值。
6.2 目标平面设计
整个测控系统均利用LabVIEW 进行软件开发,图像处理部分用到的模块为NI Vision Assis⁃tant 视觉助手。如图11 所示,为机械臂在转动过程中的一张振动图像及其对应的阈值分割效果图。可以看到,柔性臂在运动过程中,由于采集的振动图像背景变化太复杂,部分背景光强灰度值与目标激光条纹灰度值相差不大,阈值分割并不能将目标与背景进行有效分离,使得最终获取的质心与激光条纹中心相去甚远,不利于图像特征点的提取。
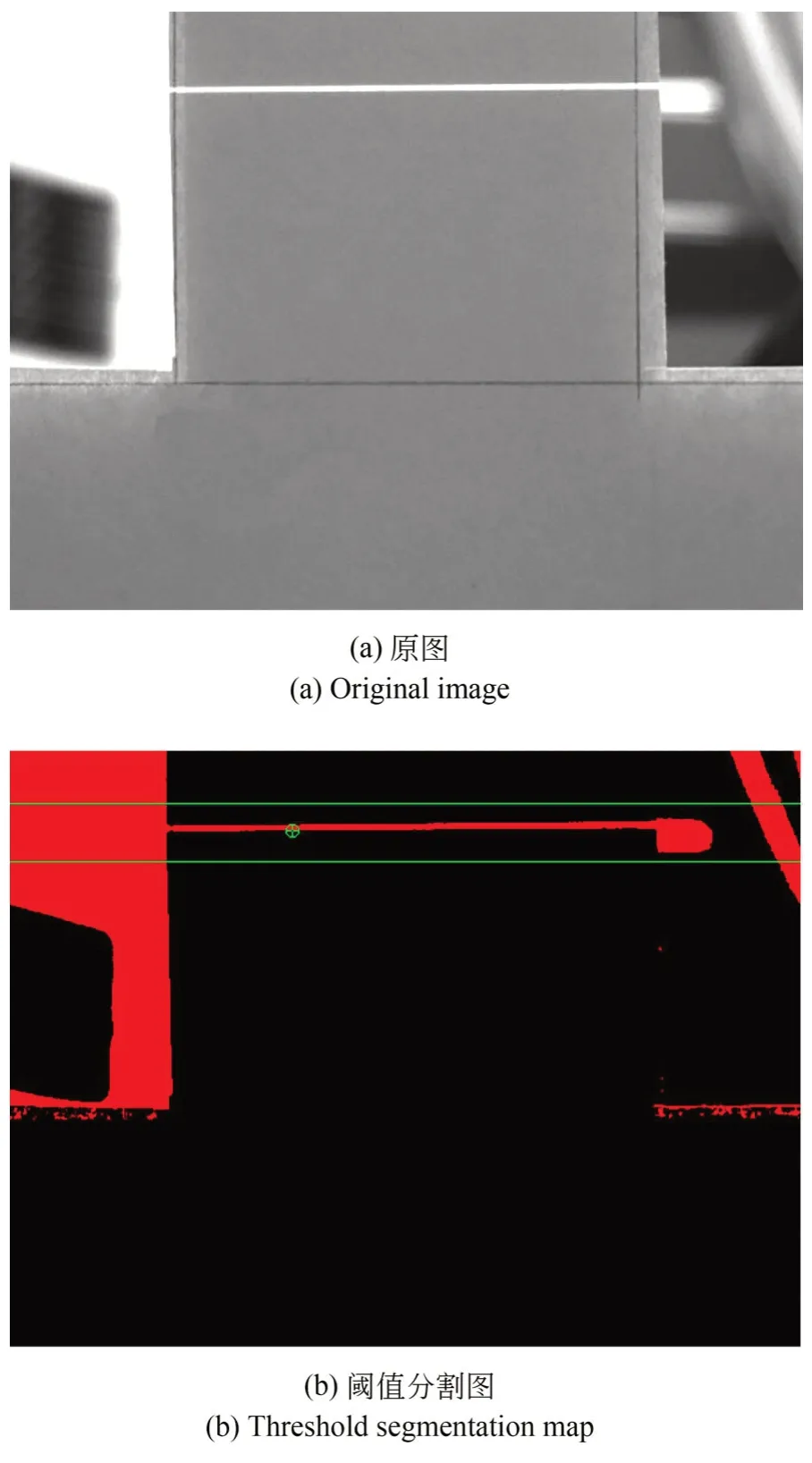
图11 振动图像及其对应的阈值分割图Fig.11 Vibration image and its corresponding threshold segmentation image
为解决这一问题,选择建立参考坐标系,使测量目标的“ROI”跟随参考坐标系移动,以完成态特征的提取[15]。在视觉助手里设置图像处理程,具体实现过程依次为图像滤波、边缘检测、寻找直边、设置坐标系、阈值分割和质心获取。
边缘检测和寻找直边是为了确定参考坐标系的位置,而利用边缘检测选择参考点的过程,需要保证参考点在相机视野中一定存在且清晰易识别。为此,设计的目标平面如图12 所示,图中目标平面增设黑色矩形区域的作用是为了得到稳定的参考点,且保证黑色矩形左侧与激光条纹投影区域左侧基本处于同一条竖直线上。基于该目标平面,利用上文所述的方法对图11(a)进行图像处理,得到图像处理结果如图13 所示,从图13(b)可以看到图像感兴趣区域跟随参考坐标系移动,且最终获取的质心与激光条纹的中心一致。结果表明该图像处理方法对于图像背景变化复杂且背景对目标特征提取干扰较大时效果较好。
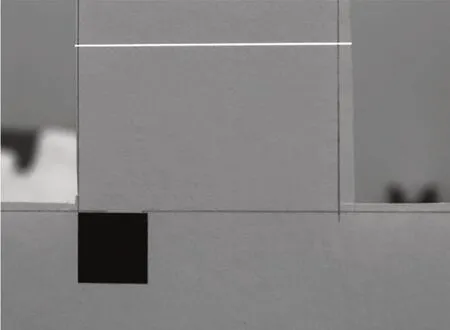
图12 目标平面Fig.12 Objective plane
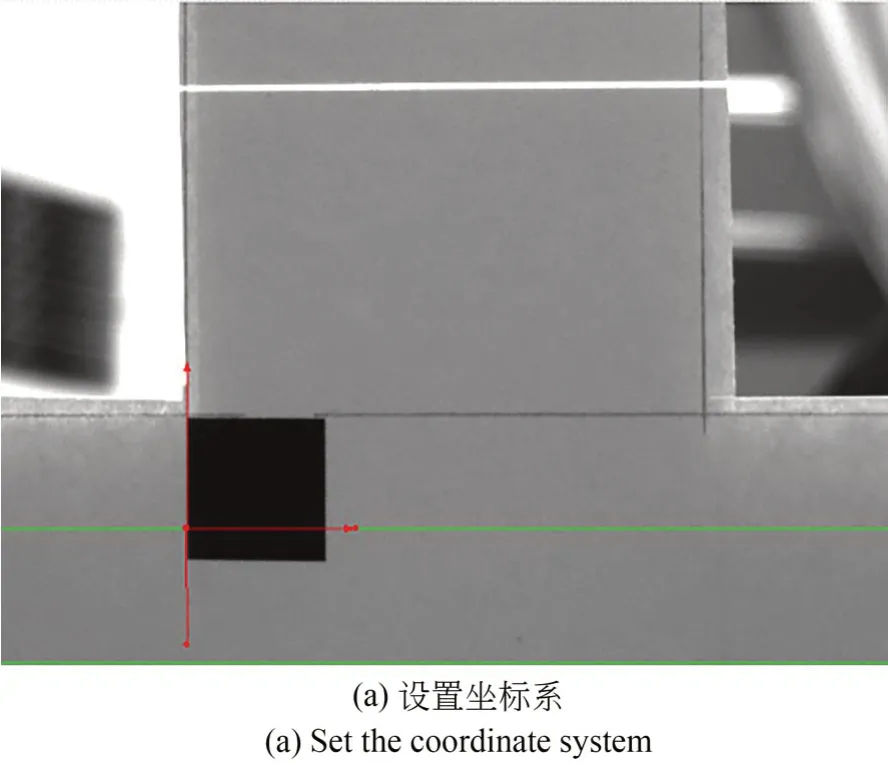
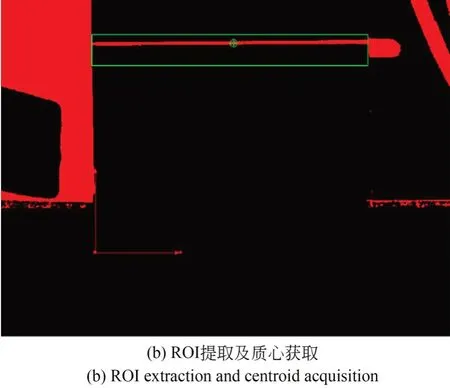
图13 图像处理Fig.13 Picture processing
6.3 测振实验与结果
利用LabVIEW 进行图像采集程序设计,结合6.2 节设计的图像处理程序,得到光条特征点像素坐标,再结合6.1 节的测振系统数学模型,完成像素坐标到相机三维坐标的转换。运动前,采集柔性臂静止状态的图像并计算出三维坐标;运动过程中,采集柔性臂运动状态的图像并计算出三维坐标,将运动过程与静止状态的三维坐标做相应数学运算,便得到了柔性臂在运动过程中产生的振动位移信息。
为了验证上文设计的线结构光视觉测振系统的可行性和准确性,同时设计基于压电陶瓷的振动位移测量方法与之进行对比。压电陶瓷片的选型、粘贴位置及采集卡的选型与上文一致。按照步进电机角速度、电机细分及控制器脉冲频率三个参数分别设置4 组实验[14],具体参数如表2 所示。
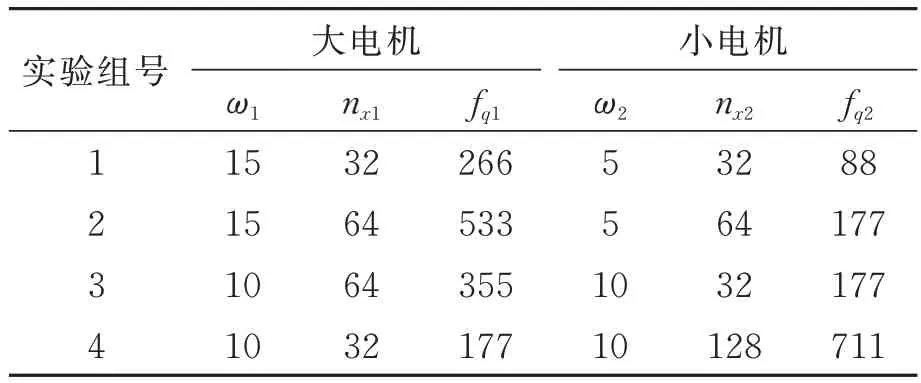
表2 步进电机参数设置Tab.2 Stepper motor setting parameters
其中:ω1,ω2分别为大、小电机的角速度,单位为(°)/s;nx1,nx2分别为大、小电机的细分数;fq1,fq2分别为大、小电机驱动脉冲速率,单位为pulse/s。
将柔性臂转动至刚性臂所在直线沿小电机方向的延长线上,作为起始位置;在测量程序中,视觉法测量时,帧速率选择90 帧/s;压电法测量时,DAQ 助手采样频率设置为90 Hz;设置完毕,同时启动大小步进电机,运行8 s 后,得到视觉及压电测量结果,如图14 所示。将上述结果进行傅里叶变换,得到对应频谱如图15 所示(考虑篇幅限制,仅展示第一组的结果)。
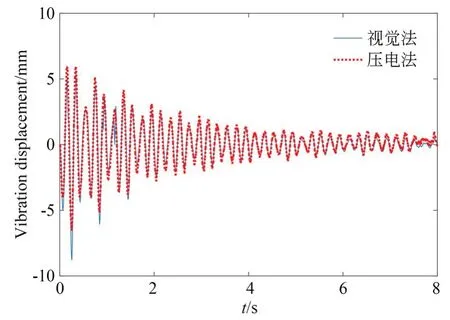
图14 两种测量方法下的时域结果对比Fig.14 Comparison of time domain measurement results under two measurement methods
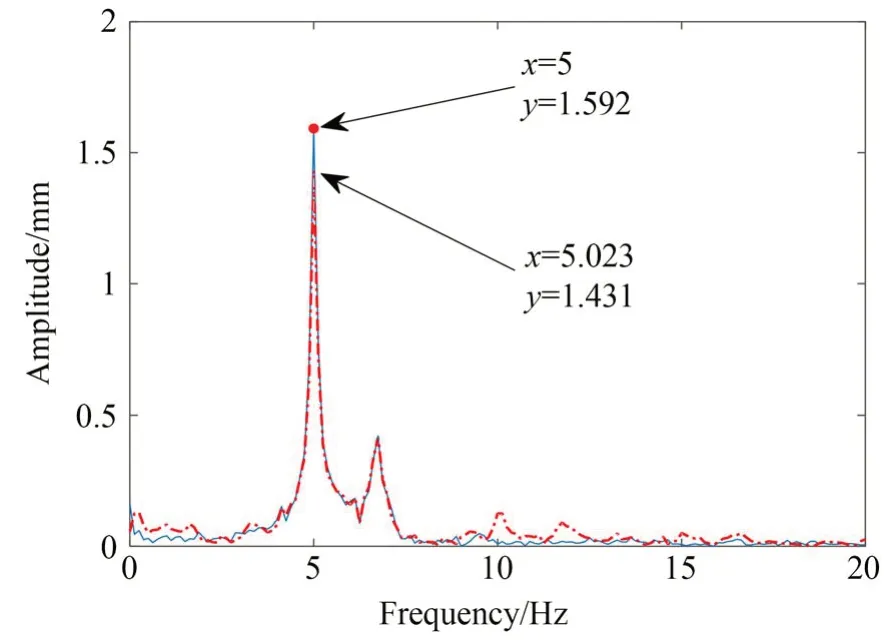
图15 两种测量方法下的频域结果对比Fig.15 Comparison of frequency domain measurement results under two measurement methods
为更具体地对两者测量结果进行对比,定义两者测量差异:
其中:Ay,As分别表示压电法和视觉法对应频谱图中的峰值。根据式(11)得到四组实验的测量结果差异分别为 10.65%,7.38%,2.82% 及9.72%,平均差异为7.64%。通过对比压电法和线结构光视觉法的时域和频域特性,在误差允许的范围内,两者测量结果一致。从而验证了线结构光视觉法测量振动信息的可行性和准确性。且线结构光视觉测振法无需改变被测物的结构特性,其测振精度取决于相机标定精度和线结构光平面标定精度。
6.4 控制实验与结果
整个控制程序由两部分组成:其一,获取柔性臂的实时振动位移量;其二,实现位移量到控制量的转换。程序的前半部分(获取振动位移信号)与振动测量程序相同,而柔性臂的实时振动位移量经由LabVIEW 中的PID 控制模块后可转换成控制量,再利用DAQ 助手便可实现控制信号到USB-6003 数据输出卡的传输。
与测振实验类似,控制实验同样选择4 组,按照表2 设置电机参数,程序中相机帧速率选择90帧/s;DAQ 助手设置成 1 采样;PID 控制模块参数分别按照上文提出的两种方法(细菌觅食算法、经验法)优化得到的结果进行设置。设置完毕,运行控制程序,待出现位移信号,同时启动大、小步进电机,调节功率放大器,运行8 s,分别记录控制后的振动位移信号。将位移信号进行傅里叶变换以便于进一步分析。图16、图17 分别为控制前后时域及频谱对比(考虑篇幅问题,仅展示第1 组的结果)。
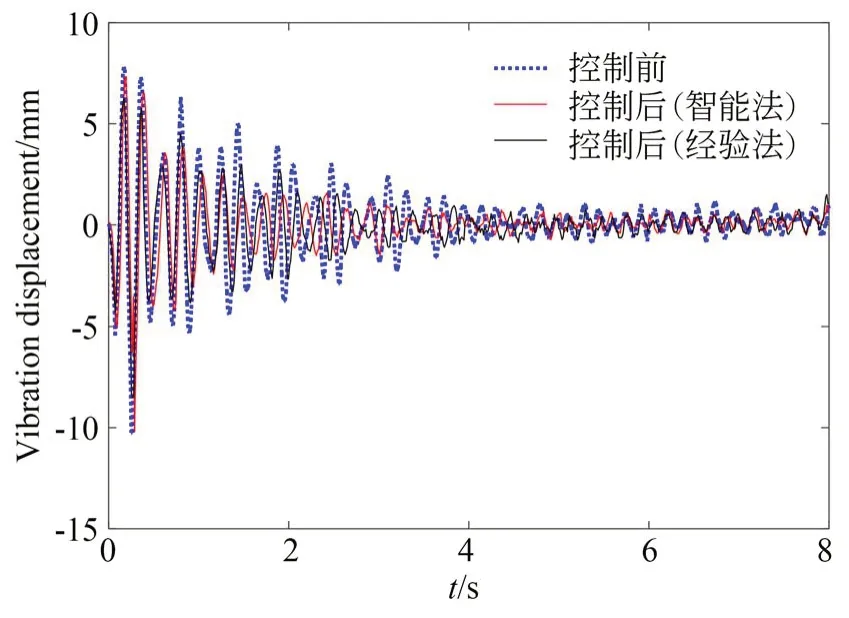
图16 控制前后振动位移对比结果Fig.16 Contrast results of vibration displacement before and after control
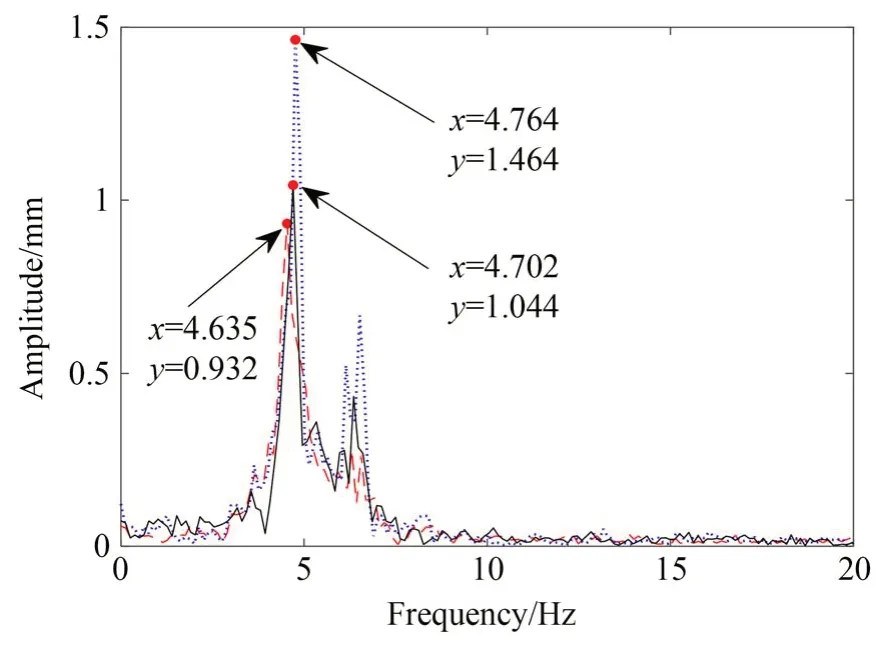
图17 控制前后频谱对比结果Fig.17 Contrast results of spectrum before and after con⁃trol
为量化控制效果,将柔性臂控制前后的一阶频率响应幅值衰减率作为量化指标,得到四组实验的控制效果如表3 所示。
综上,与仿真控制结果一致,智能法和经验法优化得到的控制器均能实现振动控制。从控制前后的振动位移图可知,控制作用主要集中在振动过程的中间阶段,约在振动产生1 s 后;而从表3 可以看到,无论是对比单组实验控制效果,还是整体平均控制效果,智能法较经验法的振动控制效果更好,进一步用实验验证了细菌觅食算法优化PID 控制器参数的优越性。
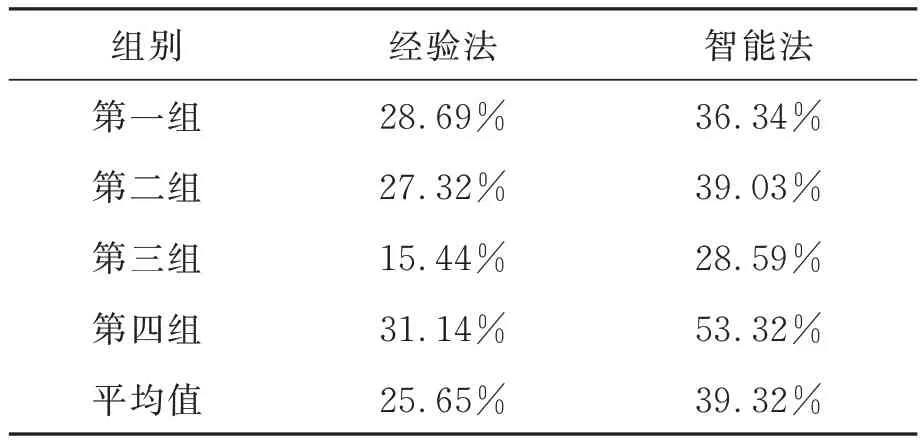
表3 柔性臂振动控制效果Tab.3 Control effect for flexible manipulator vibration
7 结 论
首先将线结构光技术应用于柔性臂的振动测量,针对图像光条特征点提取受复杂背景干扰较大的情况,设计了合适的目标平面,提高了特征点提取精度;接着设计测振实验并与压电法对比验证了文中设计的线结构光视觉测振系统的可行性与准确性;最后利用细菌觅食算法优化PID 控制器,并通过实验对控制算法进行了可行性验证。实验结果表明,针对柔性臂的一阶模态振动,利用经验法整定的PID控制方法平均控制效果为25.65%,而利用细菌觅食算法优化的PID 控制方法平均控制效果为39.32%,验证了细菌觅食算法优化PID控制器参数的有效性。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
汽车维修与保养(2020年11期)2020-06-09
中学生数理化·高三版(2019年1期)2019-07-03
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
试题与研究·高考数学(2016年1期)2016-10-13
肇庆学院学报(2016年5期)2016-03-11
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
