基于增强滤波和特征聚类分析的导线隐患识别技术研究与应用
2021-12-14 10:42宋殷冠邹宇凌焕乔苏一峰唐彰蔚
宁夏电力 2021年5期
宋殷冠,邹宇,凌焕乔,苏一峰,唐彰蔚
(广西电网有限责任公司钦州供电局,广西 钦州 535000)
0 引 言
随着无人机巡线率的不断提升,利用无人机拍摄的普通影像进行导线提取和隐患识别成为近几年研究的热点,并在图像分割、导线提取和隐患识别三类算法模型上均取得了一定的研究成果。在图像分割领域,学者们提出的多阈值优化算法和分段线检测技术可以分别满足小样本和大样本试验的要求[1-2]。在导线提取领域,针对细导线和长档距导线的识别一直是研究的难点,学者们陆续提出了亚像素边缘检测技术、运动估计和Hough变换、BP神经网络算法、基于支持向量机算法的导线纹理特征分析等方法[3-9]。在导线隐患识别领域,国内学者提出的概率神经网络算法、卷积能量差异比较法和多子图像增强比较法能在测试实验中较好地识别出导线缺陷[10-11]。
上述研究验证了利用无人机影像实现导线准确提取和缺陷准确识别的技术可行性,但当前基层单位在应用过程中普遍存在响应速度较慢,隐患识别准确率不高和对电脑硬件配置要求较高等问题,说明在技术成果的实用化方面仍有改进的空间。本研究的目的是对已有图像分割、导线提取和隐患识别算法进行完善和优化,提高输电导线的准确提取率和隐患识别率,降低对软硬件配置的要求,从而达到能够在巡检现场便捷使用的要求。
1 导线隐患识别算法原理及分析流程
基于上述研究成果,本文提出了一种基于增强滤波和特征聚类分析的导线隐患识别算法,其具体分析流程包括图像阈值化、导线边缘检测、Hough变换、聚类分析和隐患特征识别等,如图1所示。

图1 分析流程
图像阈值化的处理阶段是将无人机、手机等拍摄的多源异构图像分割成不同数据集合的过程,其目的是通过特征判别,对图像的一般特征进行分类和判别,为边缘检测和Hough变换奠定基础。本研究所采取的图像阈值化判别方法如式(1)所示:
(1)
式中:j—坐标(x,y)的像素值;
T—计算的阈值水平,采用全局最优阈值算法计算得到。
在导线边缘检测阶段,本研究为克服传统滤波算法响应时间长和误差率较高等不足,提出了一种改进型的Canny滤波算法来实现图像中导线边缘的检测,其二维高斯函数方程及其一阶导数如式(2)、式(3)所示:
(2)
(3)
式中:δ—高斯函数在x-y域上的标准差。
与传统滤波算法不同的是,该算法能够更好地检测出输电导线的真实边缘,其检测边缘像素与实际边缘像素能达到误差最小化的优点,具有较低信噪比和低误差率。其信噪比方程如式(4)所示,误差率方程如式(5)所示。
(4)
(5)
式中:ASNR—信噪比;
AROD—误差率;
f(x)—滤波器的脉冲响应;
f2(x)—脉冲响应的平方值;
f′(x)—f(x)的一阶导数;
G(-x)—检测边缘;
G′(-x)—在x=0时的检测边缘的一阶导数;
n—图像的单位像素个数;
δ—标准差,滤波器脉冲响应值的范围是[-w,w]。
处理的第三步即是通过Hough变换从步骤二中所得到的边缘图像中提取不连续线段,其算法如式(6)所示:
ρ=xi×cosα+yi×sinα
(6)
式中:ρ—经过坐标为(xi,yi)的边缘点的一组线段;
α—x轴和y轴之间的角度,通过改变α值得到不同的线段组合ρ。
为克服Hough变换中可能存在的误差,提高识别的准确性,本研究利用在其之后开展的特征聚类分析,以降低在线段组合ρ中可能存在的漏判或误判。为进一步提升鲁棒性,需要利用聚类算法将错误线段与正确线段分离开来。本研究采用K均值算法来实现线段的聚类,将数据集群x={x1,x2,…,xk}划分为K簇,并使所有簇C={C1,C2,…,CK}的平方误差最小,如式(7)所示:
(7)
式中:μk—集群k的平均值,通过初始化K个集群、将数据点分配到最近的集群并通过分配的数据点来计算新的集群。
设置1个图像补丁库I={I1,I2,…,IN},每个补丁定义为1个k维度的输入矢量y,编码的目的是将这些向量表示为n个基向量的稀疏近似的线段组合,即对于第i个输入向量而言yi∈Ri。
(8)
式中:b1,b2,…,bj∈Rk是基向量;
ai∈Rn是稀疏向量;
B—y的非线性特征。
利用式(9)求得B和ai的最优解:
∀j∈(1,…,n)
(9)
结合式(8)和式(9),如果B∈Rk×n成立,即可构建表征k维矢量图像的特征向量f,如式(10)所示:
(10)
在导线隐患的特征识别阶段,本研究所采取的判别流程如下:目标图像中由ρ所堆积的特征向量集f构成了特征向量集F,如式(11)所示:
(11)
式中:P(d|F;σ,θ)—自变量d和F的表达函数;
d—单帧影像的差异值,是判别导线隐患的特征阈值;
σ和θ—特征向量F的最小二乘法计算的模型参数;
Z—归一化常数;
Eσ,θ(d,F)—Gibbs能量函数,其表达式如式(12)所示:
(12)

di,dj—像素i处和j处的差异值。
在式(12)中,如果线段中任意2个像素高度尽可能接近,即di-dj≈0,则判别为无异常,否则判别为存在隐患。
由上可得,d可用式(13)表示:
(13)
对d求解:首先通过线性代数变化将式(13)重新表述为L1和L2约束优化的问题,其n阶矩阵分别以E和I表示:
由此可得导线隐患的判别阈值d的完整表达式如式(16)所示:
(16)
式中:D—d的叠加矢量集;
Dj—dj的叠加矢量集;


T—全局最优阈值;
β—归一化常数。
2 导线隐患识别算法测试试验
项目组选择了不同背景情况下的无人机巡检影像开展了试验性测试,测试样本全部来源于线路运维班组的日常巡线时利用无人机拍摄的普通图像,涵盖了复杂背景、单一背景和不同粗细的导线。图2为用于复杂背景情形下背景的阈值化和导线边缘提取测试的部分样本。图3为用于单一背景下导线断股缺陷智能识别测试的部分样本。
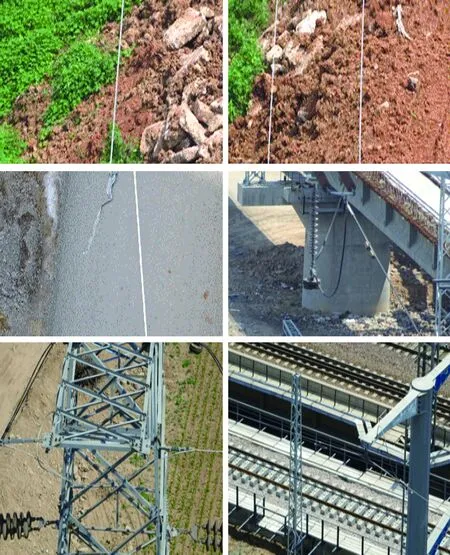
图2 导线边缘提取测试的部分样本

图3 导线断股缺陷智能识别测试的部分样本
为进一步检验本算法的响应速度和识别率,将其与传统BP神经网络算法、支持向量机(support vector machines,SVM)和概率神经网络(probabilistic neural network,PNN)进行了对比测试。为了验证该算法对硬件配置要求较低,本次测试将算法软件安装在常规配置的笔记本电脑上,软硬件配置具体为处理器I5-1135,运行内存8 G,存储容量512 G,软件为Win10。用于测试导线提取响应速度的样本组1的样本数为12个,用于测试算法识别准确率的样本组2的样本数为100个,用于测试导线准确识别率和测试导线缺陷准确识别率的样本数分别为50个。
3 试验结果分析和算法特点
算法响应时间测试结果如表1所示。从表1可以看出:BP神经网络算法的最快响应时间是0.539 6 s,最慢响应时间是1.162 2 s,平均响应时间是0.8256 s;SVM算法的最快响应时间是0.520 0 s,最慢响应时间是0.930 9 s,平均响应时间是0.680 5s;PNN算法的最快响应时间是0.457 9 s,最慢响应时间是0.770 9 s,平均响应时间是0.582 1 s;本研究算法在最快响应时间、最慢响应时间和平均响应时间上均优于上述3种算法,分别为0.355 2 s、0.724 1 s和0.532 1 s。
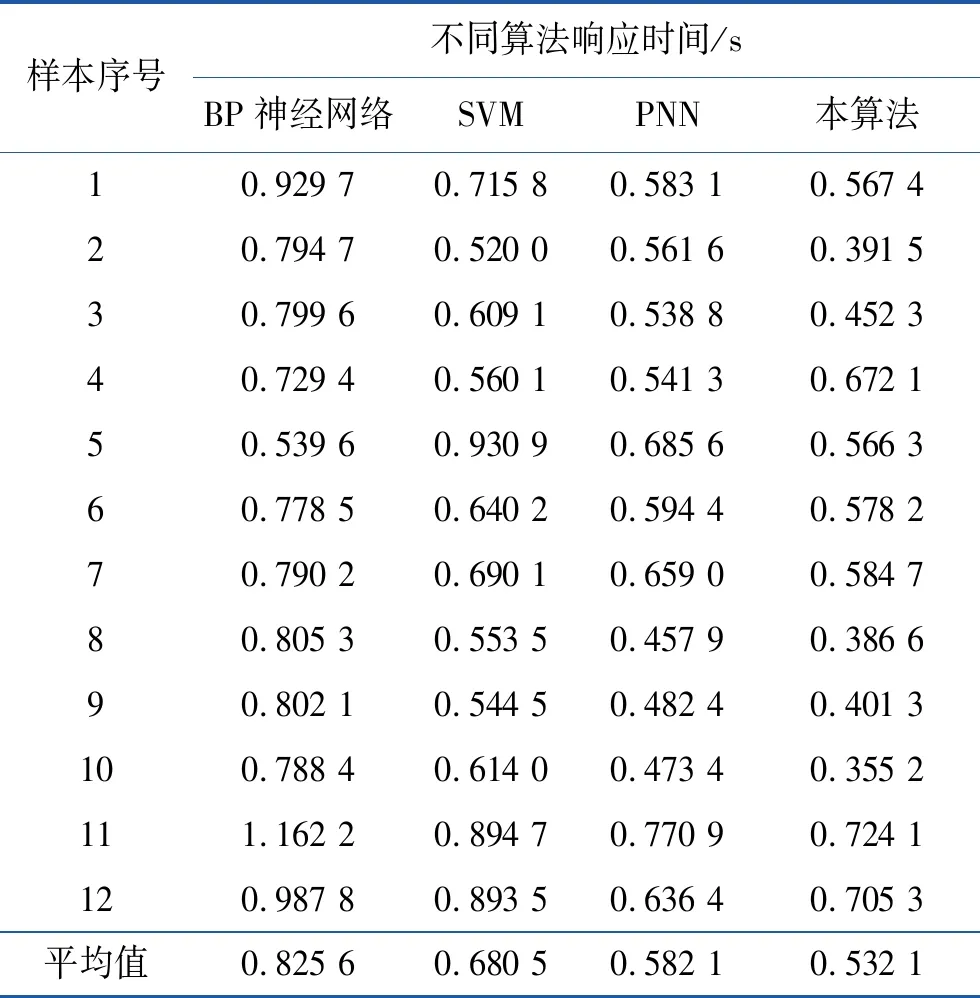
表1 算法响应速度测试结果
图4为本算法在复杂背景情形下背景的阈值化和导线边缘提取的部分过程结果。
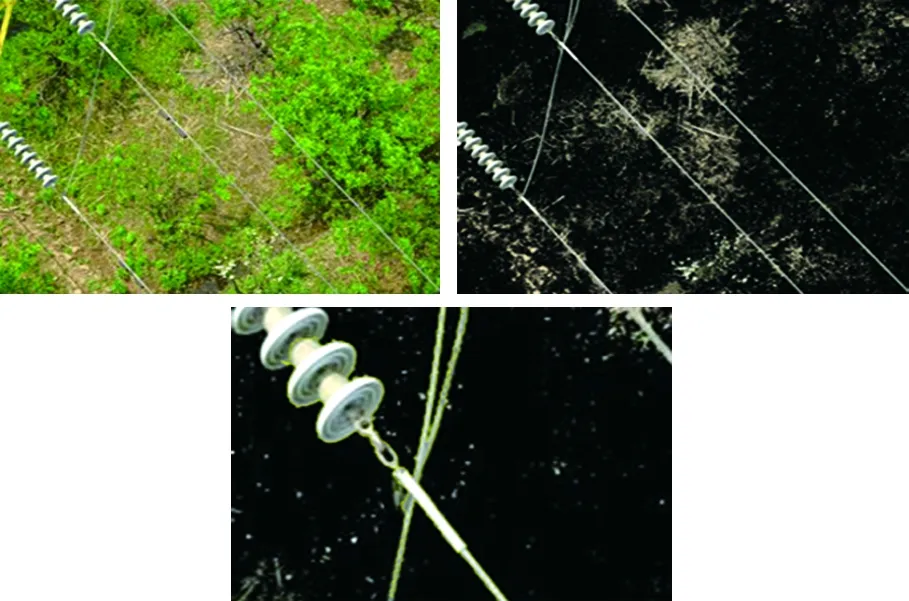
图4 复杂背景下导线边缘的提取
各算法对导线缺陷识别率测试的结果如表2所示。
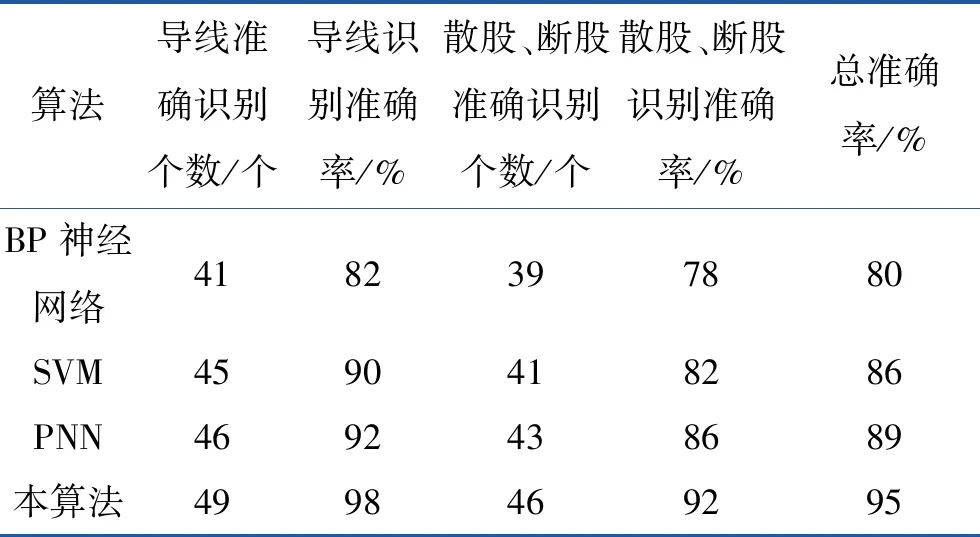
表2 导线隐患识别率测试结果
从表2可以看出,在导线准确识别率和导线隐患识别率方面,该算法的总准确率达到了95%,也明显优于上述3种传统算法。图5为本算法在单一背景下导线断股缺陷智能识别的部分过程结果。
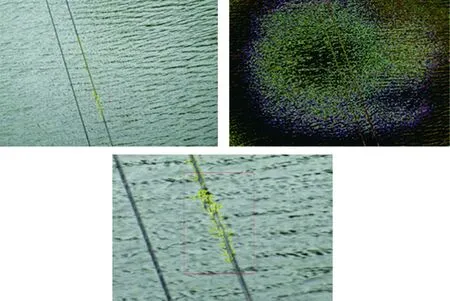
图5 导线断股缺陷的智能识别
通过上述分析和对比测试可以看出,该算法具有以下显著特点:
1)在导线边缘检测中,应用了一种改进型的Canny滤波算法,能够有效降低信噪比;
2)为进一步提升算法鲁棒性,利用K均值算法开展特征聚类分析,有效提高了识别的准确率;
3)该算法对硬件配置整体要求较低,能够很好地适应线路巡检的实际工作状况。
4 结 论
本研究立足于输电线路巡检的实际需求,为克服已有算法对线路巡检影像质量要求较高,响应速度较慢的不足,提出了一种基于增强滤波和特征聚类分析的导线隐患识别算法。本研究对图像分割、导线提取和隐患识别算法均做出了一定的改进,利用增强滤波算法改善了传统Canny滤波算法的信噪比,利用K均值聚类算法提高了导线识别和隐患判别的准确率。利用现场巡检图像作为测试样本的试验测试表明,该算法能够很好地对日常巡检图像进行准确的导线提取和隐患识别,其响应速度和识别准确率均优于传统的BP神经网络算法、SVM算法和PNN算法。由于该算法对电脑硬件要求较低,可通过便携式笔记本电脑在线路巡检过程中完成巡线图像的分析和隐患识别,便于运维班组在第一时间采取处理措施,切实降低了基层人员的工作复杂度和工作强度,具有较强的实用性。
猜你喜欢
科技创新与应用(2022年12期)2022-05-08
汽车电器(2021年4期)2021-05-07
汽车电器(2020年2期)2020-03-13
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
科技视界(2018年3期)2018-04-02
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12
电脑知识与技术(2016年24期)2016-11-14