
面向高精地图应用的汽车前照灯偏转控制研究
2021-12-14 07:40杜小芳杨贤诚夏婉扬
重庆理工大学学报(自然科学) 2021年11期
杜小芳,张 兴,杨贤诚,夏婉扬
(1.武汉理工大学 汽车工程学院, 武汉 430070;2.现代汽车零部件技术湖北省重点实验室, 武汉 430070)
汽车自适应照明系统是基于车辆的方向盘转角和车速等信息计算得到汽车前照灯偏转角度,从而通过偏转车灯光轴减小弯道照明盲区[1]。也有的自适应照明系统是基于当前道路半径计算偏转角(如文献[2]和文献[3]中所推导的转角计算公式)。随着技术的进步,目前利用多传感器和图像识别技术计算车灯偏转角的智能前照灯成为了热门[4-5],如通过安全方程计算偏转角,从而更科学地兼顾安全性与舒适度[6],这些研究虽然提高了弯道照明效果,但是车辆在即将进入弯道但尚在直线道路上时,汽车方向盘和前轮并未偏转,因而前照灯也不会发生偏转,所以无法提前使待转区域的道路得到有效照明,不能提前获取弯道的路况信息。另外,在车辆驶出弯道时也有类似的问题,这说明基于方向盘转角或弯道半径的自适应车灯系统存在滞后现象,同时在S形弯道中间拐点前,车灯光轴无法照射到拐点之后区域。
针对这些问题,提出一种基于规划路径的智能前照灯偏转控制算法,结合高精地图可实现车灯三维偏转控制,此算法在直线和复杂曲线道路拐点前有良好的照明效果,并且对二维复杂曲线道路同样适用。
1 车灯偏转限制
在GB4599—2007《汽车用灯丝灯泡前照灯》中规定了城市四级公路的照明最低照度值为 5 lx,在此种亮度下,基本能满足机动车驾驶员驾驶作业要求。在JTG D20—2017《公路路线设计规范》中规定标准车道宽度为3.5 m。根据这2个标准,计算得出前照灯光轴分割汽车行驶路径曲线后所形成的曲线段到光轴的最大距离为2.25 m[7]。如图1中所示,曲线ab上的点到汽车光轴直线ab的距离为h,h最大值为2.25 m,即车灯偏转后的光轴不能偏离道路2.25 m以上。

图1 光轴在直线道路偏转示意图
根据GB/T 30036—2013《汽车自适应前照明系统》标准确定的配光标准,要求左右车灯偏转后须满足配光要求,即偏转后光型不变,左右车灯的偏转控制过程应相同且同步。除此之外,由于现代智能前照灯的设计趋于小型化,所以车灯的最大偏转角度受空间结构影响也有一个极限值。
另外,由于防眩光等因素限制[8],前照灯光轴偏转在垂直方向限制范围为-3°~5°。
2 算法原理
2.1 三维路径的分解
常用的路径规划方法有人工势场法、栅格法、蚁群算法、遗传算法等[9],利用规划的路径信息可得到汽车未来行驶路径曲线,在三维高精地图下可以获取坐标点高程信息,于是可以得到三维路径曲线。
采用投影法把三维路径分成垂直面和水平面2个方向。如图2所示,把三维路径曲线L1分别向垂直平面ZOX和水平面XOY投影得到曲线L2和L3。

图2 垂直面和水平面上的路径投影
L2反映道路在垂直方向的形状,L3反映道路在水平方向的形状。通过分析可知L3曲线上各点坐标值分别为(x1,y1),(x2,y2)…(xn,yn),L2曲线上各点的坐标值为(x1,z1),(x2,z2)…(xn,zn)。
2.2 水平方向的控制
2.2.1控制原理
在水平方向上,前照灯的偏转控制算法如图3所示,设汽车所处的O1点坐标为(xt,yt),汽车在上一时刻的轨迹点坐标为(xt-1,yt-1)。定义O1A是探测线,其长度为L,O1A与汽车前照灯的光轴共线,与路径曲线相切于O1点。用O1A线探测出未来行驶路径上距离A点最近的点。

图3 水平面内前照灯光轴偏转示意图
具体计算步骤如下:
1) 由于路径曲线实际是由许多小线段组成,所以O1A的斜率kt等于O1点处小线段的斜率,即:
kt=(yt-yt-1)/(xt-xt-1)
(1)
式中:xt、yt为O1点横纵坐标,汽车在上一时刻的轨迹点坐标为(xt-1,yt-1)。
此时利用下式可求得A点的坐标(xAt,yAt):

(2)
式中:L为O1A探测线的长度,kt为O1A的斜率,(xt,yt)为O1点坐标。
2) 在(xt,xt+L)范围内找距离A点最近点,通过计算该范围内的各个坐标点到A点距离来求出最小距离点。该范围内某点(xt+n,yt+n)到A点距离为:
(3)
式中:xAt、yAt为A点横纵坐标值,n为整数。
通过计算找出最近的点,该点的坐标就是D点的坐标(xD,yD)。
3) 光轴O1D的方程表达式为:
(4)
变形为:
(5)
式中:xD、yD为D点横纵坐标,xt、yt为O1点横纵坐标值。
路径曲线段O1D上的某点(xt+m,yt+m)到光轴直线距离为:
(6)
式中:参数a=yD-yt,参数b=xD-xt,参数c=(xD-xt)yt-(yD-yt)xt。

(7)

2.2.2 汽车横摆和车速对偏转角的影响
汽车在转弯行驶过程中,车身会发生横摆运动(如图4所示),产生一个横摆角Yaw。通过分析得到:

(8)
化简后为:
(9)
式中:m为汽车质量,R为转弯半径,ω为横摆角速度,ay为侧向加速度,可由车载加速度传感器测得,v为汽车前进方向速度,t为时间,Yaw为横摆角。
加上横摆运动影响后偏转角为:
(10)

图4 汽车横摆运动示意图
在前面论述的控制算法中,探测线O1A的长度L若改变,其探测的路径上D点就会改变,从而改变偏转角。在不超过h值限制条件的情况下,探测线长度越长,车灯偏转后照射路线距离就越远。为了实现动态调节探测线长度,根据文献[10]中得出的汽车停车视距和汽车车速的关系式,用下式计算L值:
L=0.009 1v2+0.663 3v+0.368 2+8
(11)
式中:L为探测线O1A的长度,v为车速。
2.3 垂直方向的控制方法
垂直方向的光轴偏转角计算方法与水平方向的计算方法相似,把y坐标换成z坐标即可,即以汽车坐标系纵轴为基准计算得到光轴理想偏转角,具体不再重复论述。但是由于光轴向下偏转会降低照明距离,所以按照上述算法计算后还需设置理想偏转角不小于0°(定义向上偏转为正)。
由于汽车车身的俯仰变化(如汽车加、减速时)会对前照灯光轴垂直方向位置产生影响,从而影响照明效果, 因此需要基于俯仰角修正理想偏转角。
以车辆坐标系纵轴为基准,定义垂直平面内车头上升时俯仰角为正,下降时为负,光轴向上偏时理想偏转角为正,向下时为负,通过分析可得到:
γ=α-β
(12)
式中:γ为实际偏转角,α为理想偏转角,β为俯仰角。
3 电机控制与执行机构
3.1 步进电机控制
为了实现精确控制智能前照灯的执行机构偏转,选用步进电机作为动力源。前照灯转动角度与步进电机所需驱动脉冲数之间的关系为:
N=αei/q
(13)
式中:N为步进电机驱动器所需驱动脉冲数,α为前照灯转动角度,e是细分控制数,i是从车灯转轴到步进电机旋转轴的机械传动比,q是步进电机步距角。由此式可求得偏转角每发生一次改变时步进电机应接收的驱动脉冲数。
产生步进电机驱动控制脉冲信号的模块称为PWM生成器,它以转速、转角或位移为输入,输出一定频率和数量的驱动和方向信号脉冲[11]。搭建PWM生成器之前先建立频率和相位可调的三角波,设计的三角波公式为:
(14)
式中:f为频率,t为时间,ψ为相位,通过调节这些参数达到调节三角波参数的目的。
上述三角波与占空比数值进行逻辑“<”运算即可得到占空比、频率、相位与三角波相同的PWM波形。然后建立方向脉冲信号:采用memory模块,当下一时刻的偏转值比当前时刻的大时,定义为正方向,当下一时刻的偏转值比当前时刻的小时为负方向。
除此之外,还需要建立脉冲计数模块。采用count up模块充当计数功能,当发出的脉冲数量达到需求时改变占空比为0,PWM生成器将不再输出驱动脉冲。由于每一时刻偏转角都在变,所以每一时刻所需要的脉冲数都不一样,计数模块在计数完后应该归零,以便于在下一仿真时刻重新计算脉冲数。使用Pulse生成模块对计数器归零控制,Pulse高电平时计数器归零。需要注意的是,首先设置的Pulse周期应该与软件仿真步长一致,其次在一个仿真步长内,发射完要求数量的脉冲所占用时间应该小于这个仿真步长,如果不满足这两个条件就会发生丢步现象。
最终搭建好的驱动模型如图5所示,模型实现了有转角输入时可输出特定数量的PWM驱动脉冲以及方向脉冲,并可调节脉冲频率、相位和占空比。

图5 多参数动态可调PWM生成器驱动模型框图
3.2 执行机构
步进电机并不是直接与车灯旋转轴相连,需要添加机械传动结构,如图6所示。转角控制精度是指一个脉冲能让车灯转动的最小角度。控制精度、步距角和机械总传动比三者关系为
p=d/i
(15)
式中:p为转角控制精度,d为驱动器接受1个脉冲时驱动电机转动的角度,与细分控制数有关,i为机械总传动比。
采用较大机械传动比的原因有2个,一是因为前照灯实现车灯偏转功能需要有较大的驱动力矩和稳定力矩来克服车灯体的转动惯性;二是因为当前的前照灯由于体积和成本限制采用了开环步进电机,在步进电机不变时,根据式(15)得出通过增大传动比来增大控制精度。

图6 执行机构
4 实验验证
首先在Simulink中建立改进算法模型,模型中加入传统自适应车灯算法模型,以便于进行两者对比。与Carsim联合后的模型如图7所示。

图7 算法控制模型
采用电子地图在武汉东湖生态区规划一段路径(如图8所示),在这条路径上提取了坐标点共 1 840个,由于改进算法是在平面直角坐标系下建立的,而电子地图或定位模块获取的坐标值是球面坐标[12],所以需要把GPS坐标值转为平面直角坐标值后才能计算分析。采用文献[13]中的转换方法,转换时设置武汉地区UTM区号为50。将转换后的坐标点导入Carsim中作为输入二维数据。道路高程数据用周期为437、幅值为30的正弦函数生成。三维轨迹如图9所示。

图8 实验道路
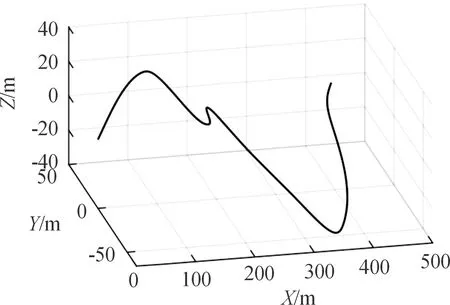
图9 三维坐标下的路径
实验时选用的车型为Hatchback,为了防止出现因道路转弯半径较小而发生侧滑现象影响实验精度,设置车速为20 km/h。由于前照灯空间结构限制,车灯偏转程度不能太大,所以设置向左或右偏转极限值20°。水平方向的仿真结果如图10、11所示。

图10 水平方向车灯偏转角

图11 水平方向h最大值
图10中,曲线“理想转角”代表无汽车横摆和无空间结构限制时由改进算法计算的前照灯偏转角,曲线“传统算法”和“改进算法”分别代表存在这2个影响因素时计算的偏转角,其中传统算法采用了文献[7]中所述的基于道路半径的车灯偏转控制方法。
对比“理想转角”和“改进算法”曲线可以看出,在不超过偏转限制20°情况下,后者的偏转角大于前者,而且弯道半径越小,两者差别越大,验证了算法采用横摆角修正的必要性;对比“改进算法”和“传统算法”曲线,可以看到在18~19 s汽车即将进入第一个弯道,前者大于后者偏转角,20~22 s汽车即将驶离弯道,前者小于后者偏转角,验证了在即将进入弯道和即将离开弯道时分别提前增大、调小转角的功能;
在图10中,40~60 s,汽车在S弯道,对比改进算法和传统算法曲线可以看出,改进算法曲线较为平缓,解决了在S弯道中间拐点区域光轴转角突变问题。图11记录的是每一时刻h值,可以看到在18、30、73 s附近时改进算法均对探测的D点做了修正,使h未超过2.25 m限制,消除了因过度偏转而影响侧边照明问题,达到了预期效果。
垂直方向的偏转值如图12所示,γ代表改进算法计算的车灯实际转角,β代表汽车俯仰角。可以看到,γ值满足在俯仰角为0时,不为负数(即车灯不向下偏转);在俯仰角不为0时,基于俯仰角对γ做了修正,且γ值未超过限制范围[-3°,5°]。

图12 垂直方向偏转角变化
为了更直观地看到改进算法的照明效果,用Matlab编程记录每一时刻的水平方向光轴和探测线位置,如图13所示,蓝色线代表偏转后的光轴,灰色线代表探测线或无偏转的光轴,可看出偏转后的光轴(蓝线)总是贴近于道路,显著提高了照明效果。
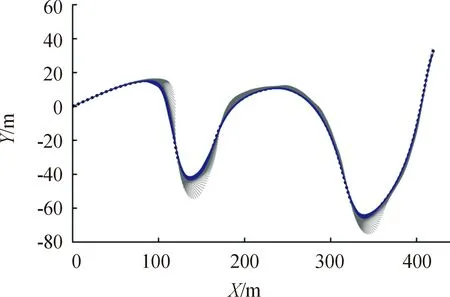
图13 光轴和探测线位置
为了更进一步验证改进算法实际执行效果,采用dSPACE设备进行快速控制原型实验[14],由于垂直和水平方向所用的电机和PWM生成器相同,所以只验证水平方向电机执行效果即可。与前面仿真不同的是,此实验所采用的传统算法是基于车轮转角来控制车灯偏转。实验装置如图14,选用THB6128型步进电机驱动器,驱动电压为12 V, 步进电机为PL25L,步距角为15°。驱动器与dSPACE的接线采用共阳极法。电机的细分控制与电机的信号频率有关[15],根据该步进电机的矩频特性设置脉冲信号频率为400 PPS,采用1细分控制。占空比设置为50%,机械传动比为300。

图14 实验设备
车灯偏转响应曲线如图15所示,在50~65 s和78~89 s内传统算法的偏转角达到了极限值20°,而改进算法小于20°,原因是道路半径较小,此时方向盘和车轮转角较大,所以当基于这些参数调节车灯时会产生较大的偏转角。由于蜗轮蜗杆结构的锁定作用,偏转响应曲线没有出现超调,符合使用要求。

图15 车灯偏转响应曲线
图16、17分别是在改进算法实验时驱动器的方向信号和PWM驱动脉冲信号,在0~0.5 s,2幅图中均出现了控制信号,而图15中在该时刻内没有产生偏转角,原因是初始定位点误差大,导致算法计算出车灯需在0.5 s内转动15°,而电机驱动力无法克服这么大的转动惯性阻力,所以没有产生偏转。但在其他时刻内实现了精确控制车灯偏转。

图16 方向信号

图17 PWM信号
5 结论
1)提出了一种基于规划路径的汽车智能前照灯偏转控制算法,并在三维路径上进行了实验。结果表明:该算法可减小车灯在道路拐点区域的偏转角突变程度,并提高水平和垂直方向的照明效果,充分发挥高精地图的应用优势。
2)该算法适应范围广,对于直线到曲线、曲线到直线以及S弯等复杂三维路径也可以把光轴偏转角约束在有效照明范围内,显著增加夜间照明效果。
3)针对步进电机的控制,设计了一种多参数动态可调的PWM生成器模型,为基于Simulink的电机驱动控制仿真和快速控制原型实验提供了便利。
4)低延时和高精度的坐标定位信息是影响此改进算法照明效果的关键,今后将继续深入这方面的研究。
猜你喜欢
汽车维护与修理(2022年1期)2022-06-28
华人时刊(2019年13期)2019-11-26
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
汽车维护与修理(2018年19期)2018-04-28
汽车维护与修理(2018年1期)2018-04-04
经营者·汽车消费报告(2013年3期)2013-05-13
经营者·汽车消费报告(2013年3期)2013-05-13
经营者·汽车消费报告(2013年3期)2013-05-13
