
AEB行人检测系统的设计与验证分析
2021-12-14 07:40:24谢旭敏
重庆理工大学学报(自然科学) 2021年11期
张 新,谢旭敏
(长沙理工大学 车辆与机械工程学院, 长沙 410114)
我国每年重特大事故中交通事故数和因交通事故死亡人数分别占到69%和78.9%,全球因道路交通事故造成的人员伤亡逐年递增。为了降低该风险造成的危害,汽车自动紧急制动系统(autonomous emergency brake,AEB)在汽车上的安装率也越来越高[1-2]。
AEB行人系统通过汽车上的传感器识别并跟踪行人轨迹,若有碰撞危险系统则发出预警信号并自动采取制动措施使汽车停止,从而保护道路环境中的行人[3-5]。
为了对AEB系统的性能进行系统测试及评价,我国发布实施《中国新车评价规程(C-NCAP)管理规则》对AEB行人系统测试进行了系统规范[6]。这对于完善AEB行人系统的标准、降低交通环境中行人的受伤几率具有实际的价值。
为了验证和评估AEB行人检测系统的性能,国外相关研究结构开发了多种AEB行人测试装置[7-8]。奥地利4active System公司开发的AEB行人检测装置通过伺服电机驱动,结构较为紧凑但灵活性较差,实验操作不便。英国ABD(Anthony Best Dynamics)公司开发的AEB行人检测装置采用盘式电机驱动,灵活性较好,但成本较高。
上述AEB行人检测设备可以较好地评估欧美地区交通环境下的典型危险场景,但与我国道路行人行为习惯存在较大差距,设备和维护成本较高,不符合我国AEB行人系统的开发和测试要求。
本文针对我国AEB行人检测系统的测试需求,设计了AEB行人检测系统,可以很好地契合C-NCAP的测试规定,系统测试场景可基于我国行人习惯灵活调整,并通过多次测试进行有效性验证。测试结果表明:所设计AEB行人检测系统满足相关测试要求,可以作为AEB功能测评和相关产品开发的支撑工具。
1 系统整体方案设计
1.1 AEB行人系统测试
针对AEB行人测试系统,C-NCAP测试规程设定了4种典型测试场景[9]:远端碰撞CVFA-50、CVFA-25和近端碰撞CVNA-25、CVNA-75。
如图1所示,假人目标与测试车辆中心线之间的水平距离为D=6 m(远端)和D=4 m(近端)。测试汽车行驶速度vv为20、30、40、50、60 km,假人移动速度为5、6.5 km/h,其移动方向与测试汽车呈垂直状态,在汽车头部宽度的25%处(M点)、50%处(C点)和75%处(K点)分别进行碰撞测试。

图1 测试场景示意图
C-NCAP规范中的AEB行人测试场景是基于欧美地区交通事故数据建立的,与我国行人交通习惯存在较大差异,因此需建立适合我国行人交通行为的测试方案,为此设定如下2种测试场景[10-11]:
1) 近距离测试场景(CPN):汽车速度为5~25 km/h,假人和测试汽车的距离为7 m。
2) 远距离测试场景(CPF):测试汽车速度为10~60 km/h(10 km/h为间隔),假人与测试汽车的距离为20 m。假人移动速度为5.4 km/h,碰撞位置为汽车50%位置处。
1.2 测试方案设计
针对C-NCAP以及行人测试相关的规定,行人检测系统应当具有如下功能:
1) 目标假人可在驱动系统的作用下沿一定速度行驶;
2) 驾驶机器人能够控制汽车按一定的速度和路线行驶;
3) 为了使假人与测试汽车发生指定位置的碰撞,假人与测试汽车互联互通保持实时通讯。
根据上述的功能需求,设计了如图2所示的系统架构。将假人固定在托板上,借助牵引带驱动假人和托板移动,并在假人驱动系统和测试汽车上安装通讯设备,借助实时动态基准站完成汽车与假人速度、位置的信息交互,满足测试场景的碰撞要求。

图2 系统架构
根据C-NCAP的规定,假人移动速度为5、5.4、6.5 km/h,测试车速在5~60 km/h,汽车行驶方向与假人移动方向保持垂直。
2 硬件实现过程
2.1 假人目标优化
如图3所示,基于C-NCAP的尺寸规定分别设计了成人假人目标和儿童假人目标,并在假人表面涂抹红外反射二氧化钛IR-1000,能够在850~910 nm,使假人的红外反射率达到40%~60%,有效提升了假人的视觉和红外特性[12]。
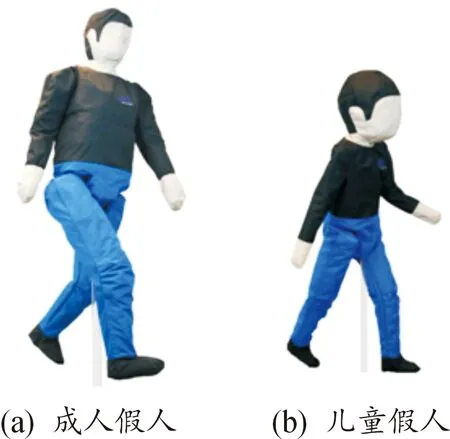
图3 假人目标
2.2 假人目标驱动机构
假人驱动机构分为牵引带、驱动端、随动端以及托板。其中,托板上配置磁铁单元,可以让假人支撑杆借助磁性的作用与托板紧密结合,以便支撑假人直立移动,其结构如图4所示。当测试汽车碰撞到假人时,磁性连接中断,假人脱离托板,避免损坏其他部件。
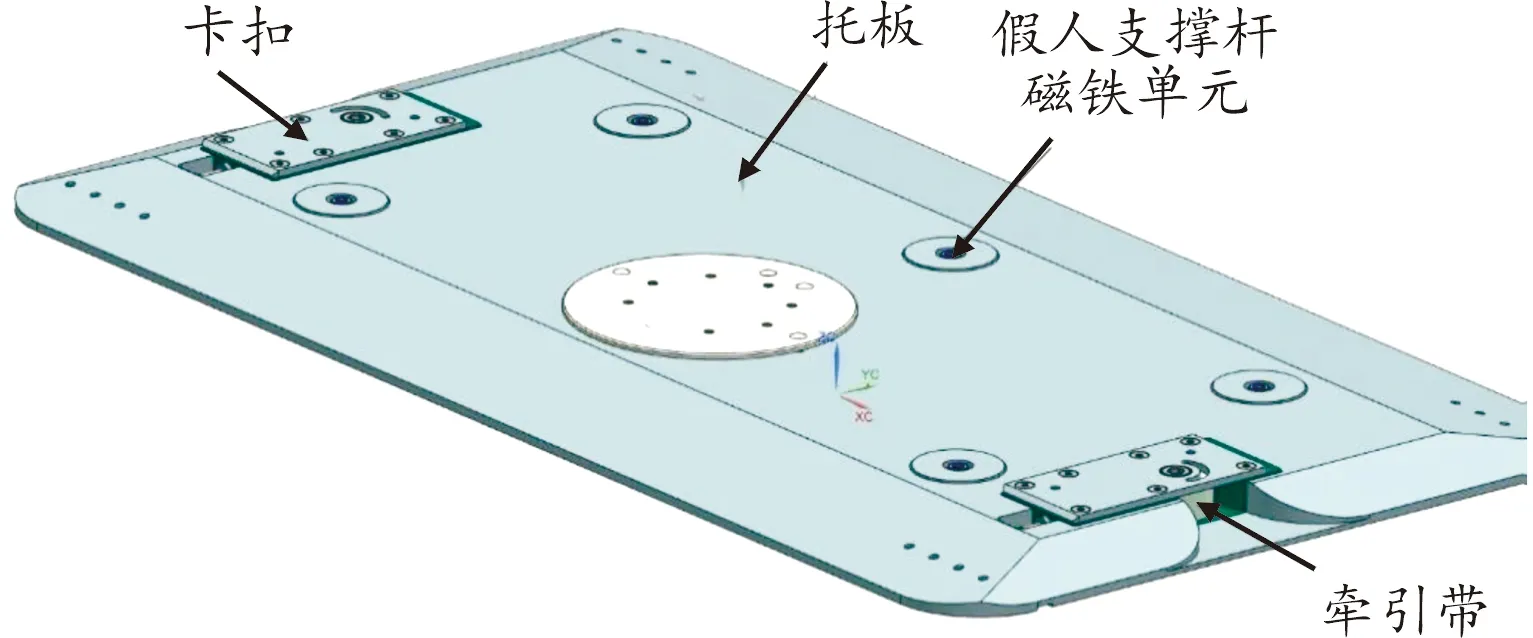
图4 托板结构
如图5所示,牵引带驱动端的组成部分主要有电源、无线通讯部分、控制器以及驱动电机。
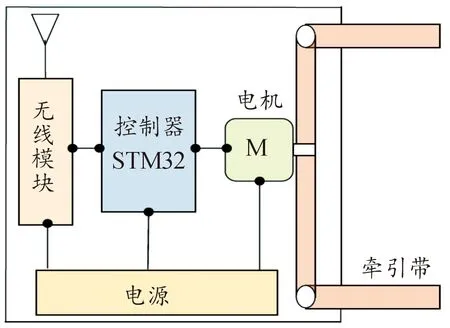
图5 驱动端结构
假人目标驱动系统结构如图6所示,汽车速度和位置信息由无线通讯模块传递给控制器,控制器根据获取的数据驱动电机运转,带动牵引带开始工作,实现假人位置的移动。
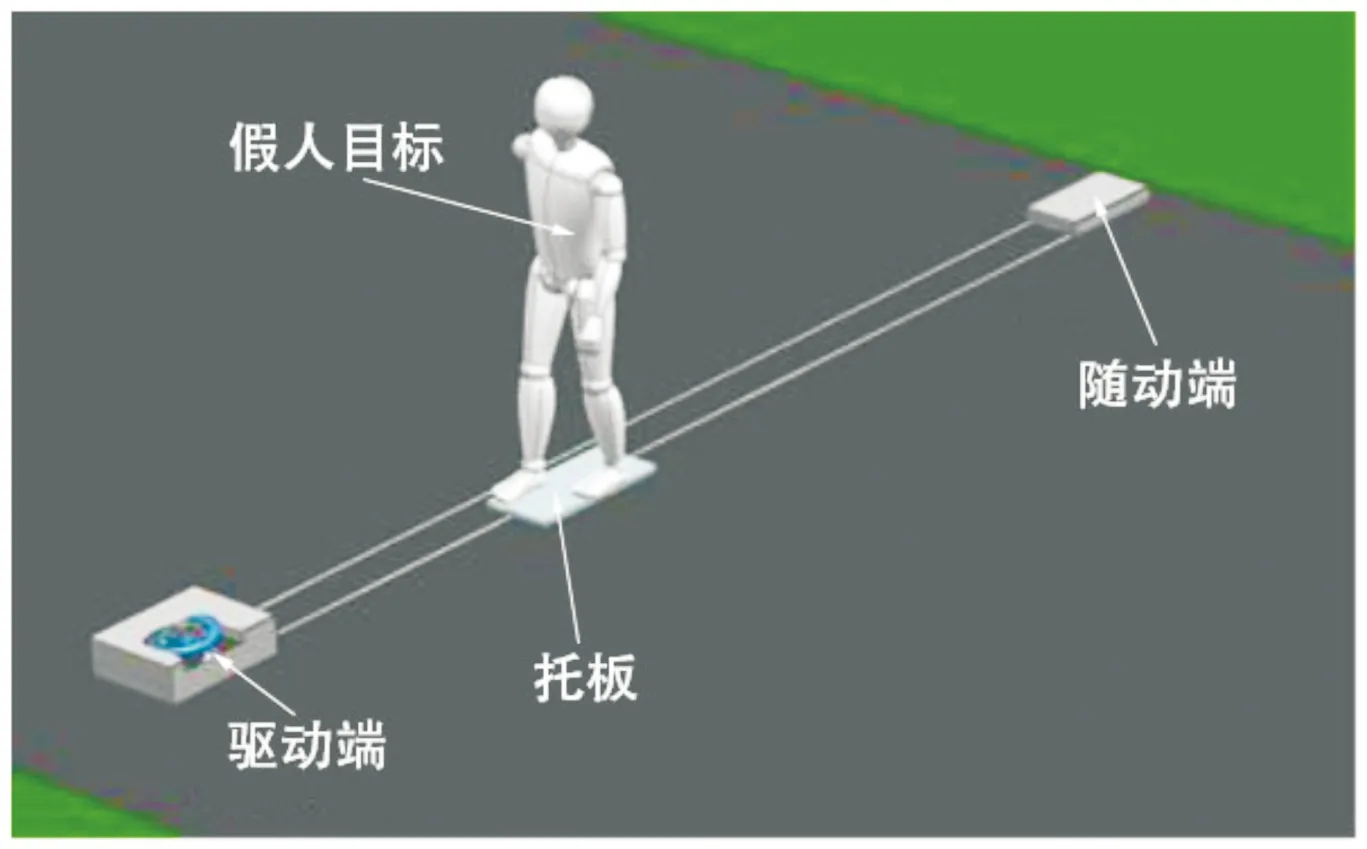
图6 假人目标驱动系统
3 开发控制系统
3.1 系统的控制策略
按照AEB测试法规要求,在控制汽车的自动驾驶机器人上安装惯性导航仪和差分精确定位装置,分别测量出汽车的实时加速度、速度、偏航角以及汽车的精确位置,并通过无线通讯模块,最终将收集的数据传输到AEB行人检测系统。
AEB行人检测系统对比测试规程对汽车速度、假人速度以及碰撞位置的规定,计算出假人应当启动的精确时间。
假人在移动过程中,驱动装置可以根据测试汽车的状态和位置,实时通过驱动电机进行加减速控制,最终使假人和测试汽车的运动关系符合测试法规的要求,发生指定位置的碰撞测试。
AEB行人检测系统和自动驾驶机器人之间有2个通讯通道,通过915 MHz信道频率,实时动态(RTK)基准站可将GPS定位信息发送到AEB行人检测系统以及汽车的驾驶机器人;通过2.4 GHz信道频率,驾驶机器人则将汽车的位置、速度信息传输到AEB行人检测系统。AEB行人检测通讯及控制过程如图7所示。

图7 AEB行人检测通讯及控制过程
3.2 设计差分定位模块
一般GPS定位误差大于3 m,不能满足测试要求的精度,为此借助差分定位方法来精确定位汽车和假人目标[13]。差分定位模块分为RTK基准站和移动站2个部分,RTK基准站放置在空旷的区域,在测试汽车和假人目标上均安装移动站。RTK基准站收集基本的GPS定位数据,然后将信息传输给移动站,移动站基于自身的GPS定位信息和RTK基准站发送的GPS定位信息,通过载波相位差分解算的方法,最终获得cm级的定位信息,进而控制驾驶机器人和假人目标驱动系统,满足测试场景对两者相对运动的要求。
3.3 设计假人驱动控制器
AEB行人检测系统控制器通过接收测试汽车的位置、速度信息,实时分析比较汽车位置是否与控制器计算要求的触发点保持一致,以此判断是否驱动假人开始移动。假人移动触发后,通过采用与测试场景相匹配的电机驱动算法,控制器可以实现对假人位置的精确控制。控制器的主控芯片(STM32F767)可以接受各模块发送的数据信息并进行处理,被控芯片(STM32F103)可以精确地控制电机转速。图8是控制器的结构和相关模块。

图8 控制器结构
3.4 假人驱动算法
AEB行人测试场景中,假人有加速、匀速以及减速的不同过程,假人驱动控制系统在控制假人运动速度的同时,需精准控制假人的运动位置,以便将假人传送到指定的位置。为此本文设计了如图9所示的S型曲线加减速驱动控制算法,将加减速过程细化为:加加速、减加速、匀速、加减速以及减减速等5个阶段,速度变化率J的绝对值保持不变,加减速模式在任意位置的加速度都连续变化,速度曲线平滑,可避免柔性冲击。
图9中t1到t3为各个阶段的运行时间。由于J为恒定值,在加速阶段和减速阶段之间,速度应保持不变,则加加速、减加速、加减速与减减速经历的时间相同,即t1=t2。

图9 S型曲线加减速模型
设vs为初速度,ve为末速度,根据运动学关系,假人的加速度a、速度v以及位移S计算公式如表1所示。

表1 参数计算公式
3.5 系统联动控制
1) 计算系统触发点。基于AEB行人检测系统的差分精确定位系统和假人检测系统移动站获取假人初始位置P0、碰撞点P1坐标的(x1,y1)和(x2,y2)。另外,由测试汽车移动站获取测试汽车头部中点处坐标V1(x3,y3)和航向角R。由车速v及假人移动到碰撞点所需的时间T(D1/Vp),计算得出系统触发点M的坐标(x4,y4)。

3) 系统联动测试。驾驶机器人系统实时更新汽车车头中心点V1(x3,y3)的坐标,并通过无线模块发送相关数据至AEB行人检测系统,然后由AEB行人检测系统实时将V1点与M点坐标值进行比对,当x3=x4并且y3=y4时,AEB行人检测系统触发假人目标移动,假人驱动控制器控制假人目标按该测试场景调节电机转速,最终实现测试汽车行驶到P1点时,假人移动到P1点。系统联动控制如图10所示。

图10 系统联动控制示意图
4 系统测试及验证
为了对AEB行人检测系统进行验证,按照C-NACP规定的行人测试场景进行行人危险工况测试实验,以验证AEB行人检测系统对假人目标位置、速度的控制精度以及AEB行人检测系统与测试汽车的无线通讯性能。
如图11所示,首先进行单功能测试,在不同测试场景下,AEB行人检测系统不与驾驶机器人联动,测试电机控制算法对假人的驱动控制精度。

图11 AEB行人单功能测试场景
每种测试场景进行3次实验,由于不同测试场景下假人与测试汽车的距离要求不同,一共完成了(4+11)×3=45次实验,相关测试结果如表2所示。基于实验结果计算出的假人目标控制精度达到96%(控制精度=符合要求实验测试/总实验次数)。由此表明,本文所设计的AEB行人检测系统可以根据测试要求对假人移动过程实现精确控制。

表2 假人移动速度和位移测试
如图12所示,在单功能测试完成后,将AEB行人检测系统与驾驶机器人联通,测试之间的无线通讯性能,查看假人与测试汽车的碰撞点是否满足测试场景的法规要求。

图12 AEB行人检测系统联动测试场景
根据C-NCAP测试规程进行20次实验(测试车速在20~60 km/h范围,每种测试场景进行5次实验),根据国内测试场景要求进行11次实验,共进行31次测试实验,测试结果如表3所示,表中的数字表示第几次实验完全达到测试场景规定的碰撞速度、位置等关键指标。
根据表3的统计情况可知,1次实验即达到要求的概率为90%,2次实验即达到要求的概率为100%。

表3 AEB行人检测系统联动测试结果
在测试过程中,AEB行人检测系统对假人速度以及假人与测试汽车碰撞位置的准确度达到96%,由于地面摩擦力不均及牵引带的弹性不可控,在单功能测试45次实验中,有2次出现误差大于精度有效范围的情况,但其综合误差仍然较小,可以满足测试法规对于精度的要求。
在对AEB行人检测系统和驾驶机器人进行联动测试中,除了3次由于AEB行人检测系统与驾驶机器人的无线通讯被其他设备干扰外,两者之间的无线通讯始终保持良好状态。由此可知,应当在空旷无干扰的环境下进行AEB行人测试实验。在无其他通讯干扰的情况下,AEB行人检测系统可以较好地与驾驶机器人进行联动测试。
综上所述,本文设计的AEB行人检测系统可以用于C-NCAP和中国行人测试场景,相较于国外的AEB行人检测系统,本文设计的测试系统具有如下的优势:
1) AEB行人检测系统的控制参数可以灵活调整,满足国内交通场景的行人检测测试要求。
2) 整个系统成本较低,可供更多的AEB行人测试和研发单位使用,有助于推进AEB行人检测系统更新提升。
本文的AEB行人检测系统也存在一定的不足。比如,假人目标没有考虑雷达的反射特性;此外,对欧洲新车评估规程(E-NCAP)等国外测试规范没有很好的适用性。
5 结论
本文设计了一种AEB行人检测系统,可以根据C-NCAP和AEB行人测试的法规要求,对假人的移动过程进行精准控制,实现了AEB行人检测系统与驾驶机器人的实时无线通讯。
根据测试实验结果可知,本文设计的AEB行人检测系统对假人目标的速度和位移控制精度达到96%,与驾驶机器人的联动测试一次成功率达到90%,所开发的假人目标具备人体特征及红外反射特性,能够用于行人危险工况的测试实验,其测试精度较高,是汽车AEB系统功能测评和相关产品开发的有效支撑工具。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
意林(2021年5期)2021-04-18 12:21:17
房地产导刊(2020年11期)2020-12-28 01:32:30
数学大王·低年级(2020年4期)2020-04-20 10:59:47
时代汽车(2020年23期)2020-03-03 17:51:10
铁道通信信号(2019年4期)2019-10-10 03:42:56
扬子江(2019年1期)2019-03-08 02:52:34
汽车技术(2017年7期)2017-08-08 03:01:48
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
汽车工程学报(2016年6期)2017-01-11 17:53:19
