基于Chernoff face的机器人焊钳性能评估
2021-12-13 14:37高忠林郭锦华翟宝亮
中国测试 2021年11期
刘 锋,高忠林,郭锦华,翟宝亮,徐 昊
(中船重工第七零七研究所,天津 300131)
0 引 言
众所周知,机器人焊钳设备性能评估是一个多因素的复杂过程,设备性能可由设备参数及运行状态检测,为了更好地评估设备性能,首先应该尽可能多的检测那些与机器人焊钳性能有关的参数,其次是找到这些参数与焊钳性能的关系,即提取对象特征信息。多参数特征信息需要运用信息融合方法对多传感器数据进行高精度融合[1],最终获得设备性能的有效描述。
目前多传感器数据融合算法在实际应用中已经日渐成熟,璩晶磊等[2]运用模糊证据理论进行多传感器数据融合,提高了多传感器实时测量值的融合精度;俞昆等[3]利用DS证据理论实现了不同传感器故障信息的有效融合,极大提高了滚动轴承故障诊断的可信度;任子强等[4]建立了多传感器数据的符合健康指标,利用数据融合算法提高了发动机剩余寿命在线预测的准确性;周卫琪等[5]建立了一种自适应无迹卡尔曼滤波的信息融合算法,利用加速度和转向盘转角等传感器信号准确的估计出了汽车的行驶状态;任子强等[6]构建了复合健康指标与非线性退化模型,结合设备历史数据运用多源数据融合算法实现了设备的剩余寿命在线预测;王宽等[7]运用3种不同类型的分类模型处理多个特征指标进行故障预诊断,采用D-S理论对预诊断结果进行加权融合决策,提高了故障诊断的准确性。
本文将多传感器数据融合算法应用到机器人焊钳性能评估过程中,运用Chernoff face脸谱法作为数据融合算法,并基于最小风险的贝叶斯决策设计分类器进行分类性能验证。
1 机器人焊钳设备性能评估指标体系的建立
机器人焊钳设备的性能是由多方面决定的,性能参数的完整性和合理性决定了最终的评估结果,这就要求在评估机器人焊钳设备的性能时,必须对多个性能参数进行全面评估。本文利用机器人焊钳设备运行过程中提取的保护电阻、恒流线圈电阻、焊接压力、焊接电流、密闭性等9个参数建立性能评估指标体系。
1.1 多传感器检测模块
采用高精度、高稳定性的AT516直流电阻测试仪进行变压器处恒流线圈电阻检测,其测量范围为1 µΩ~20 MΩ,基本准确度为0.05%,测试速度最高140次/s,同时用于变压器接地测试、保护电路测试和次级电阻测试,使用AT688测试仪进行变压器绝缘耐压测试,六量程测试范围可达100 kΩ~10 TΩ,本文测试值为15 MΩ以上,量程内准确度为1%,计算机远程控制指令兼容SCPI(可程控仪器标准命令集),通过RS232C接口,实现远程控制和数据采集与分析,使用压力传感器MA-522测试电极压力,测定准确度为全量程的±3%,使用MB-400M感应线圈测试焊接电流,测定准确度为全量程的±1%,测得的模拟量数据通过RS-485写入PLC中,电参数检测过程如图1所示。

图1 电参数检测过程
焊接过程中冷却水由水气单元中的冷水机提供,在水气单元进回水路上总共包括4个测量准确度0.5%的SV4200水流量计和2个测量准确度0.1%的PN7594水压力计,分别进行进回水压值、进回水总流量值、固定臂流量、活动臂流量、变压器流量及各路水温的测量。采用西门子S7-1516PLC作为控制器,调节阀门开度、变频器频率分别控制水路流量和压力[8],PLC通过IOLink对整个装置中流量计和压力计的数据进行采集处理,水流量压力检测流程如图2所示。

图2 水流量压力检测流程
为避免传感器误差对测试结果的影响,对特征数据进行了归一化预处理,利用多传感器信息融合算法提高了评估系统的可靠性[9]。
1.2 Chernoff face脸谱法

图3 Chernoff face属性

表1 面部特征描述
1)脸部轮廓
如图3所示,脸部轮廓由上下椭圆组成,这两个椭圆分别代表前额和下颌,它们相交于A和A′两点,A与原点O之间的距离由属性Fr和Fα确定。

因此,

根据解析几何的知识,上椭圆的轨迹方程可表示为:

其中au表示上椭圆的水平半轴,同理,下椭圆的轨迹方程为:

其中ad是下椭圆的水平半轴,如果垂直轴和水平轴的长度比定义为:
可以据此推导上下椭圆的轨迹方程为:

其中,
2)眼睛和瞳孔
面部的两只眼睛也被描绘成两个椭圆,一些重要的属性定义如下:

人们经常通过眼睛的运动来表达自己的情感,因此,椭圆的旋转特性受到格外关注,椭圆的旋转方程可写为:

其中,

视线是面部信息的重要组成部分,本文中瞳孔的位置由属性Ph和Ps决定,瞳孔的高度Ph等于Eh,瞳孔的方向由Ps决定:

3)眉毛和鼻子
眉毛和鼻子简单的画成线条,眉毛的一些属性如下:

眉毛的线性方程为:

鼻子的长度由下式决定:

4)嘴巴
嘴巴在表达情感方面起着重要的作用,本文用圆弧表示,其长度由圆心角和圆半径确定,嘴巴的圆弧方程为:

其中Mc是圆心纵坐标Mr和Mα分别是圆的半径和圆心角:
1.3 相关分析和特征选择
信号特征提取已经在前文中完成了,得到的这些特征包括保护电阻(D1)、绝缘耐压电阻(D2)、恒流线圈电阻(D3)、二次回路电阻(D4)、焊接压力(D5)、水流量(D6)、密闭保压比(D7)、焊接电流(D8)和大开尺寸(D9)。这9个信号特征包含了机器人焊钳性能相关的绝大多数重要指标,能够全面反映机器人焊钳状态性能,如果将提取的一些特征视为面部变量,则可以绘制Chernoff face图像[11]。对机器人焊钳设备的性能来说,每一项指标的重要性是不同的,因此给每一项指标科学地赋予权重,是综合评估的先决条件[12]。特征选择是绘制切诺夫面的一个重要过程。特征选择一般有两种方法:一种是相关分析,另一种是主成分分析。本研究进行了相关分析,克服了多特征非线性、强耦合的缺点,降低了因各特征量之间的耦合作用而产生的检测误差,因此能够较好地识别机器人焊钳的状态。提取的特征与焊钳性能的相关系数如表2所示,只有特征D9与焊钳性能相关性较低。将相关系数较高的9个特征作为面部变量,绘制Chernoff face图像,替代结果如表2所示。如前所述,绘制Chernoff face需要17个面部变量,因此,未被所选特征替代的面部变量初始化默认值为0.5。通过将所有的面变量归一化到0.05~0.9之间,即可绘制出对应的Chernoff face图像。

表2 相关分析和特征选择
1.4 性能评估分级
保护电阻是机器人焊钳重要属性,对应瞳孔位置,瞳孔位置能够明显表达人物情绪,保护电阻值过大或过小,瞳孔位置就会距离过近或过远,类似的绝缘电阻、恒流线圈电阻和焊接电流会影响眉毛偏移的角度、眉毛长度和眉毛高度,二次回路电阻和密闭保压比会影响嘴角弧度和嘴角半径,焊接压力、水流量和大开尺寸会影响眼睛角度、位置和宽度。面部表情相应的就会表现出难过或糟糕或高兴或冷静的情绪,满足对机器人焊钳设备性能的综合评估客观且实用的要求。将最理想的机器人焊钳设备性能指标定为标准样本,级别评价集可分为优、良、合格、较差、很差5个等级,分别对应Chernoff face图像的5种经典表情,如图4所示。

图4 不同性能等级的Chernoff face
2 机器人焊钳特征提取
为了使计算机能够准确地识别人脸表情,设计了一种原始的模式特征提取方法。首先根据提取的机器人焊钳特征绘制Chernoff face图像,如图5(a)所示。然后提取图像边界,进行网格划分,将整个图像分割成50×40个小正方形区域,如图5(b)所示,然后将Chernoff face轮廓所交叉的正方形区域涂成黑色,从而将Chernoff face图像转换为二值图像(图5(c))。如果用数据“0”代替黑色正方形区域,用数据“1”代替白色正方形区域,将得到一个二进制矩阵。该二值矩阵命名为模式特征矩阵,保留原Chernoff face图像的主要表情信息。

图5 模式特征获取
3 贝叶斯决策分类
贝叶斯决策的本质是基于判别结果的错误率或风险值的分类识别技术,假设样本总量为N,类别数为M,类别ωi,i=1,2,···,M中含有Ni个样本,此时抽中ωi类的概率P(ωi)为:

一般来说,条件概率密度函数P(X|ωi)可用正态密度函数来近似,即:

式中:X——样本特征向量;
X(ωi)——ωi类的均值向量;
Si——n维协方差矩阵,定义为:

其中Si为ωi类中第j个样本特征向量。基于式(32)可以计算出样本属于每个类别的概率为:

图像的分类识别中,错误是不可避免的,贝叶斯决策分类原理主要有最小错误率决策和最小风险值决策,为了适用机器人焊钳的性能评估,本文选用基于最小风险值的贝叶斯决策。
假设待测样本特征向量为X,其实际类别为ωi,样本属于该类的概率为P(ωi|X),若决策αi的条件风险R(αi|X)为:


可以得出最小风险贝叶斯决策规则为:

4 机器人焊钳性能评估分析
本文针对机器人手工一体化焊钳设备,在线实时监测设备运行状态,采集设备正常运行阶段的性能指标,从不同维度的设备性能特征综合评估其性能等级,与以往单参数指标判定方式相比,多指标综合评估减少了设备状态评估的不确定性和复杂性[12],保证了评估的完整性和正确性,对机器人焊钳设备的整体评估提供了有效实践。
采用交叉检验方法测试机器人焊钳性能分类器的有效性,过程如下:首先每个性能等级选取3种典型特征模式矩阵作为样本训练,即将15个模式特征矩阵作为稳定状态存储,图6为各等级代表性模式特征矩阵。通过待检样本的特征值得到Chernoff face图像进而得到模式特征矩阵,并运用最小风险贝叶斯分类决策进行样本分类,最终完成机器人焊钳性能评估。
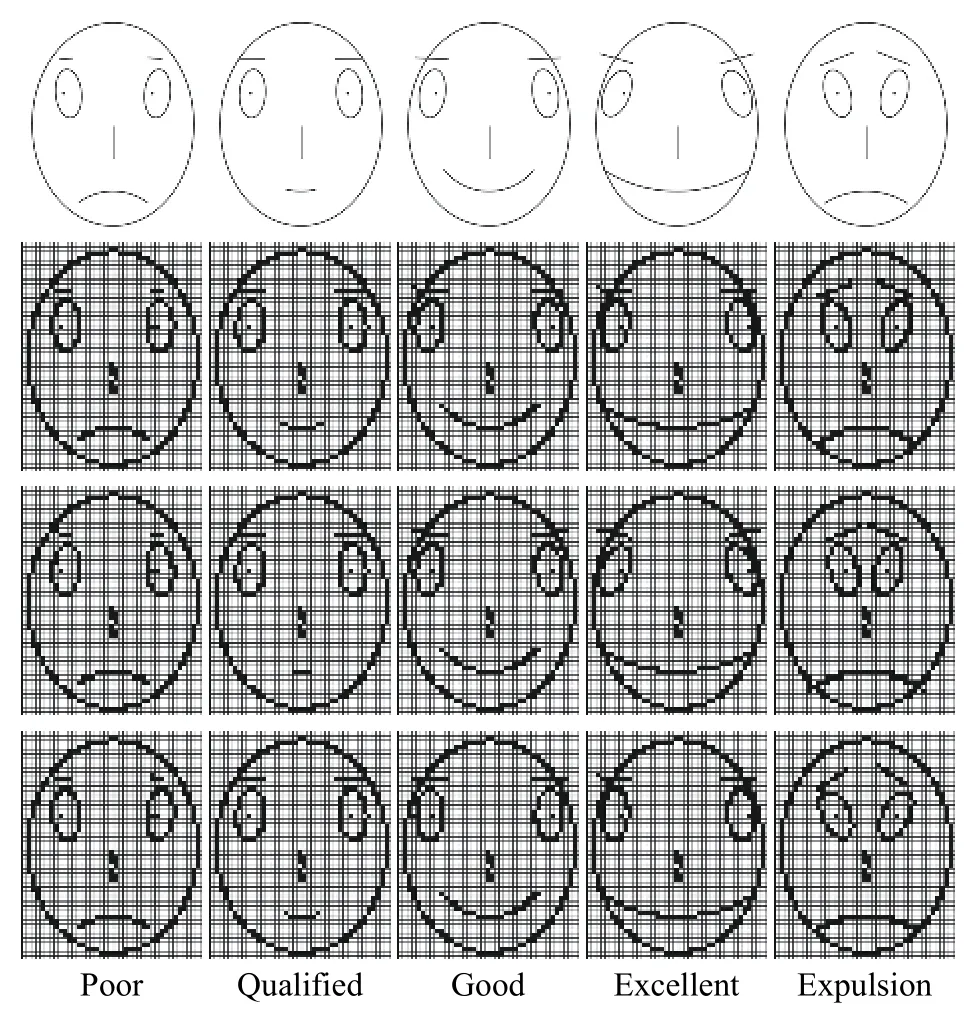
图6 各等级代表性模式特征矩阵
为了检验Chernoff face图像法的性能,选取了100个不同性能等级的机器人焊钳样本进行分类性能测试,其中各项指标都接近标准的样本28份;保护电阻、绝缘电阻、恒流线圈电阻、焊接电流稍小,二次回路电阻、密闭保压比、焊接压力、水流量、大开尺寸稍大的样本6份;保护电阻、绝缘电阻、密闭保压比、焊接压力稍小,恒流线圈电阻、焊接电流、二次回路电阻、水流量、大开尺寸稍大样本4份;绝缘电阻、焊接电流、二次回路电阻、密闭保压比、焊接压力、大开尺寸较小,保护电阻、恒流线圈电阻、水流量较大样本11份;绝缘电阻、焊接电流、焊接压力、水流量、大开尺寸较小,保护电阻、二次回路电阻、恒流线圈电阻、密闭保压比较大样本8份;保护电阻、绝缘电阻、焊接电流偏小,二次回路电阻、密闭保压比、焊接压力、大开尺寸、恒流线圈电阻、水流量偏大样本21份;绝缘电阻、二次回路电阻、密闭保压比、焊接压力、大开尺寸偏小,保护电阻、恒流线圈电阻、焊接电流、水流量偏大样本14份;绝缘电阻、二次回路电阻、密闭保压比、焊接压力过小,保护电阻、恒流线圈电阻、焊接电流、水流量、大开尺寸过大样本5份;保护电阻、绝缘电阻、焊接电流、焊接压力、大开尺寸过小,恒流线圈电阻、二次回路电阻、密闭保压比、水流量过大样本3份;分类结果如图7所示,分级性能测试结果能够反映机器人焊钳整体性能状态,所有性能指标均合格整体性能才会合格,根据性能等级可直观反映出测试设备的性能状态,提升性能评估效率。从试验结果来看,所有试验样品均可正确分类,并且从不同性能等级的样品生成Chernoff face图像表情中可以得到该样品的不合格属性,厂家可以针对性的进行设备检修,提升维修效率。总之,Chernoff face可以很好地帮助我们判断机器人焊钳性能。
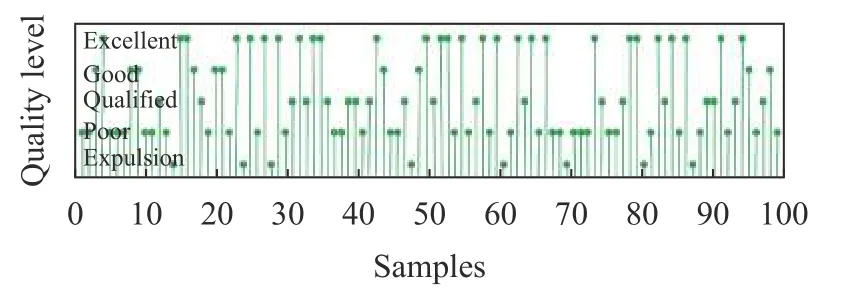
图7 分级性能测试结果
5 结束语
本文提出了一种新颖有趣的焊钳性能评估方法,对机器人焊钳特征信号进行测量和分析,将提取的特征作为面元,绘制Chernoff face图像。通过Chernoff face面部表情,可以快速、准确、形象的了解机器人焊钳性能状态。利用贝叶斯决策对应于不同面部表情和不同设备性能水平的模式特征矩阵,设计了设备性能分类器。最后,对所研制的分类器的分类性能进行了测试和讨论。
该方法能对机器人焊钳设备性能参数进行合理的量化处理,较好的解决了机器人焊钳设备性能评估问题,通过计算实例验证了方法的正确性和实用性;与复杂的特征与质量指标之间的相关性揭示算法相比,Chernoff face方法更快、更简单、更高效;Chernoff face面部表情可以通过不同的面部表情反映设备性能水平,特别是其视觉特性使性能评估程序易于理解和解释。
猜你喜欢
装备制造技术(2022年5期)2022-09-06
江苏广播电视报·新教育(2022年1期)2022-05-15
青海电力(2022年1期)2022-03-18
中学生数理化·中考版(2020年10期)2020-11-27
航空发动机(2020年1期)2020-06-13
汽车实用技术(2019年3期)2019-03-05
中学生数理化·中考版(2018年11期)2019-01-31
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年5期)2016-03-22
焊接(2015年10期)2015-07-18