
舰船红外目标特性测量航路规划研究
2021-12-11 07:58刘文鹏叶宗民
长春理工大学学报(自然科学版) 2021年6期
刘文鹏,叶宗民
(91404 部队,秦皇岛 066001)
舰船红外目标特性数据的获取,如温度分布、辐射亮度、辐射强度等特征参数,对舰船隐身效果和舰船红外抑制系统效果的评估研究等至关重要,而为了客观反映目标和武器的性能,舰船目标往往处于高速运动状态,即使测量平台已知被测目标的计划运动路径,其速度、位置以及高度间的差异也使得连续保持同一条件跟踪测量目标变得极为困难[1]。因此,尽管国外进行了大量目标与环境特性测量系统相关的建设和研究工作,拥有地基、机载、球载、弹载、星载等各种测量平台[2-3],在实际的红外特性测量过程中,如何在设备、环境等变化因素的影响下,通过有效的测量方法尽可能获得被测目标真实的、定量化的红外特性数据仍是一个亟待解决的问题[4]。本文针对舰船这一典型目标,根据其红外特性易受目标距离、目标表面材料特性、大气状态以及与太阳的相对位置等环境因素影响的特点,通过对测量航路进行合理的规划,有效利用测量设备和参试资源,提出了相应的航路规划方法,并设计了一套较为完备的航迹计算程序和应用。
1 测量难点与规划假设
1.1 舰船红外特性测量难点
目标红外特性测量容易受到多种因素的影响,如光谱发射率、空间/体积辐射亮度分布、镜面反射、反射的直射阳光、反射的环境光、大气衰减等等;此外,目标红外特性还将随暴晒、内部热源、气动加热(空中目标)、导热、对流和辐射等热平衡的变化而产生动态变化[5]。一般,舰船红外辐射的主要来源有两类:一类是内热源(发动机和烟雾、内部散热),一类是外热源(太阳反射和背景特性),其中海面是自然界中最为常见和复杂的背景之一,海面背景红外特性是一个很复杂的随机过程,它是随许多因素和条件而变化的[6-7]。因此,海面舰船目标的红外特性测量是一个十分复杂的工作。
要准确测量舰船红外目标特性,就要做好测量平台和被测目标的航路规划,即利用已知的被测舰船运动轨迹规划测量平台的航路,其原理是首先通过仿真计算得到测量平台的理想航路,再通过选取航路中的若干离散点,根据每个点的坐标和对应的时刻,按照约束条件规划出实际测量平台的运动状态和轨迹。为了保证实际中测量平台能够按照要求进行运动,航路中点的数量要适当,点太多则对测量平台的运动操控要求过高,点太少则无法满足测量精度要求。
1.2 测量航路规划假设条件
为了规划和计算方便,同时符合实际情况,在理想测量航路规划的过程中,限定以下假设条件[8-12]:
(1)不考虑空气阻力以及风力的影响,假定被测舰船相对地面的速度vc恒定,作匀速直线或匀速圆周运动;
(2)为了保证测量系统的稳定,测量平台在一定时间内的航向转角θ有界,即|θ|≤θ0,θ0为实际中能达到的最大偏航角;
(3)被测舰船与测量平台之间保持适当的距离R,该距离应小于测量仪器最大的探测范围Rmax;
(4)若采用机载测量,被测舰船与机载测量平台的距离R还要考虑被测舰船与测量飞机的高度关系,通过高度差h和俯仰角α可以确定飞机与舰船的最小距离,必要时也可以简化为水平投影计算。
2 航路规划方法设计
航路规划的基本思想是根据测量需求,使用仿真手段得到理想航迹,再对航迹进行离散化,取出相应的航迹时间点和位置点,以供测量平台参考。
2.1 圆周测量方法
2.1.1 被测舰船圆周运动
对海面舰船红外目标特性进行水平方向全方位测量,最简单的方法就是岸基圆周测量。将测量设备架设在岸边,通过被测舰船作匀速圆周运动来获取水平方向360°全方位的红外特征,测量航路如图1所示,其优点是:(1)测量设备架设方便,便于稳定跟踪目标;(2)测量光路可以避开逆光情况,舰船也能进行不同工况的匀速圆周运动。缺点是:(1)控制舰船保持圆周运动航行状态的难度较高;(2)无法调整测量俯仰角,舰船航向获取精度低,方位角间隔大;(3)测量距离较远时对测量设备的空间分辨率要求高。因此,当舰船尺寸较大,不能离岸太近时,不适合采用该方法进行测量。

图1 岸基测量示意图
2.1.2 测量平台圆周运动
1.舰载测量
水平方向全方位测量还可以采用舰载圆周测量方法:将测量设备架设在测量船上,以被测舰船为圆心(被测舰船进行匀速直线运动),测量船做圆周运动以获取被测舰船水平全方位的红外特征,测量航路如图2所示。其优点是:(1)方位角精度较高;(2)可以近距离测量,减小大气衰减的影响。缺点是:(1)海况稍差时被测舰船很难保持航向和稳定状态;(2)无法测量舰船在不同工况、不同航向条件下的全方位红外特征。
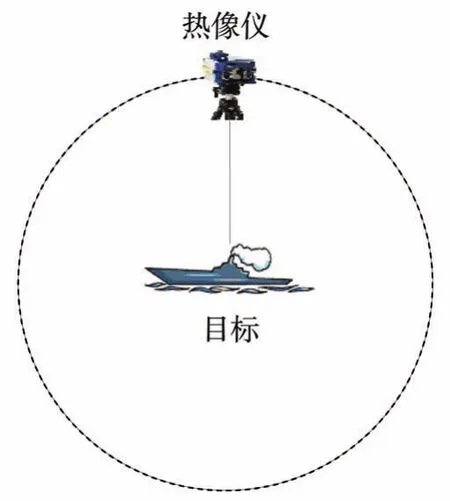
图2 舰载圆周测量示意图
2.机载测量
为了获取舰船多个俯仰角下的红外目标特性,可以采用机载圆周测量,测量航路如图3所示,即通过载机在空中以不同高度围绕被测舰船(匀速直线运动)进行圆周运动,以获取指定俯仰角度下舰船全方位的红外目标特性,因此该方法可以弥补上述两种测量方法只能获取水平角度红外特性数据的不足。其缺点是:(1)一般只有旋翼类飞机能够围绕舰船做圆周运动;(2)飞机飞行高度受GPS高程定位精度差的影响,难以保证全方位的俯仰角全部满足设定值;(3)被测舰船做匀速直线运动时,飞机的实际航路并非圆周,实施起来非常困难。

图3 机载圆周测量侧视图
2.2 直线测量方法
2.2.1 测量船菱形运动
针对圆周测量在实际中难以实施的问题,本文设计了舰载菱形测量方法,如图4所示,测量船沿A→B→C→D→A的航路运动,被测舰船由M→N往返运动。该方法可以获取舰船2周360°全方位的红外目标特性,且能得到舰船左右两舷分别处于阳面和阴面状态下的红外特征。
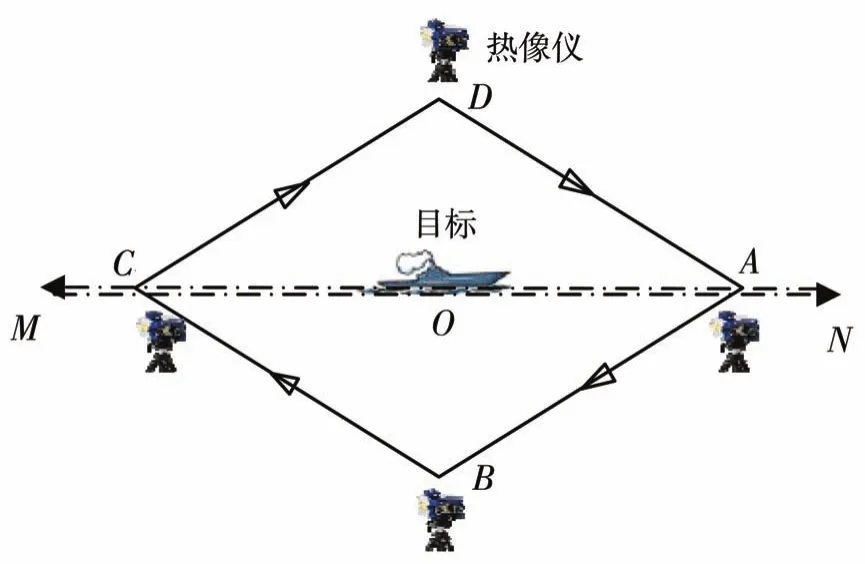
图4 舰载菱形测量示意图
2.2.2 测量飞机直线运动
一般在对海面舰船进行全空间红外目标特性测量时,方位角的精度要求可以适当降低,选取典型方位角度测量即可;而舰船在俯仰角度上的红外目标特性,才是红外导引头在逼近目标的过程中需要全面掌握的数据,因此俯仰角度连续变化时的舰船红外目标特性数据尤为重要。为此,本文设计了选取典型方位角度,载机逼近被测舰船方向飞行,俯仰角度为0°~90°的测量航路规划,如图5所示。这样的运动轨迹不仅适合旋翼类飞机,也适合固定翼类飞机,且飞行难度较小,航迹规划简单。

图5 机载直线测量示意图
3 航路规划仿真结果
由于被测舰船圆周运动和舰载菱形运动的航路规划及运动状态相对简单,因此本文主要针对比较复杂的机、舰载圆周测量和机载直线测量进行航路规划仿真,假定测量时段内海上风向固定,为x轴正方向,被测舰船沿正风向运动。
3.1 机、舰载圆周测量仿真结果
机、舰载圆周测量方法的核心是:使测量平台和被测舰船尽量保持不变的距离,而只有方位角在变化。以机载测量为例(舰载测量可以视为机载测量的水平面投影)。如图6所示,以被测舰船为原点,被测舰船沿x轴正向做速度为vc(含当地风速)的匀速直线运动,运动方程如下:

图6 机载圆周测量俯视图

飞机初始位置为被测舰船正前方半径r处,为了保证测量飞机与被测舰船始终保持不变的距离s,设定飞机和船一样沿x轴正向做速度为vc的匀速直线运动,同时沿顺时针做速度为vfc的匀速圆周运动,最后飞机的实际速度vf为两者的合成。

根据上述参数方程和运动方程,本文利用MATLAB的APP设计功能模拟了被测舰船在直线航行时,飞机保持同一俯仰角绕舰船的运动轨迹,初始参数如表1所示,计算示例结果如表2和图7所示。图7中直线轨迹为舰船运动轨迹,圆周轨迹为飞机运动轨迹。图7(a)是三维轨迹,图7(b)是投影到水平面上的二维轨迹。同时程序还可以输出测量时间点、被测舰船横纵坐标、测量飞机横纵坐标、相对方位角、绝对方位角、飞机实际速度、飞机与舰船实际距离等逐点参数,并自动记录在Excel中。根据以上图表数据的对比分析,可见飞机与舰船实际距离始终保持1 000 m,俯仰角始终保持30°,因此在实际测量时,可以根据飞机性能和测量精度的要求,合理选择离散的时间和位置数据,进行航路规划。

表1 机载圆周测量初始参数

表2 机载圆周测量仿真结果数据

图7 机载圆周测量仿真结果示意图
3.2 机载直线测量仿真结果
机载直线测量方法的核心是:使测量平台的运动方向尽量始终指向被测舰船,保持相对方位角和飞行高度不变,而只有俯仰角变化,如图8所示,测量航路共有8条,方位角以x轴正向为基准确定。被测舰船位于原点,沿x轴正向做速度为vc(含当地风速)的匀速直线运动,运动方程同式(3);为了保证测量飞机与被测舰船始终保持不变的相对方位角θ,设定飞机同样沿x轴正向做速度为vc的匀速直线运动,同时沿方位角θ以速度vfc向被测舰船做匀速直线运动,最后飞机的实际速度vf为两者合成,如图9所示。
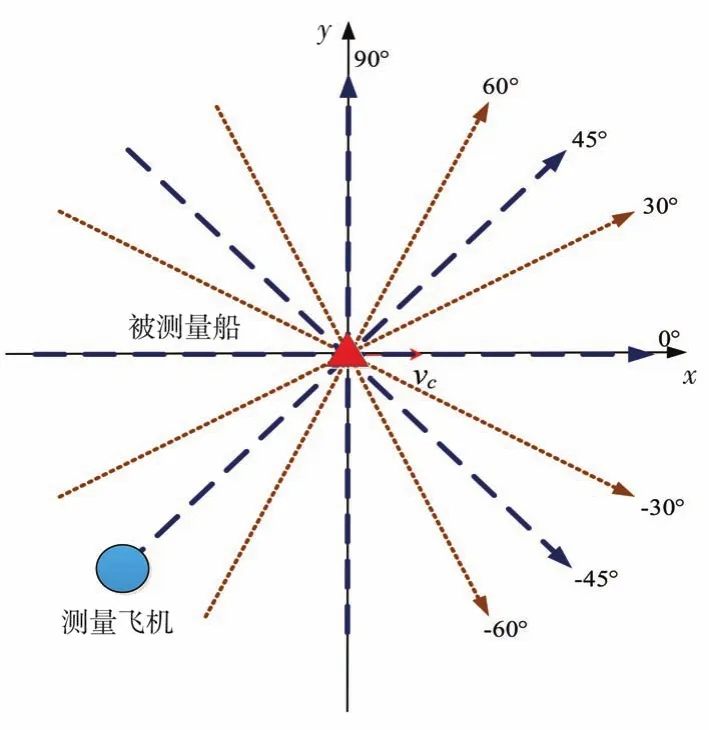
图8 机载直线测量俯视图

图9 机载直线测量运动示意图


根据上述参数方程和运动方程,本文模拟了舰船在直线航行时,飞机保持不变的方位角60°向舰船飞行的运动轨迹,计算参数如表3所示,计算示例结果如表4和图10所示,程序可以输出测量时间点、被测舰船横纵坐标、测量飞机横纵坐标、相对方位角、飞机与舰船的实际距离等逐点参数,并自动记录在Excel中。根据以上图表数据的对比分析,飞机从逼近到远离目标舰船的整个过程中,相对舰船的方位角都没有发生变化,且运动轨迹是一条直线,实施测量时非常方便。

表3 机载直线测量初始参数

表4 机载直线测量仿真结果数据

图10 机载直线测量二维仿真投影轨迹
4 结论
本文根据海面舰船红外目标特性测量的要求,确定了舰船红外特性的测量难点,根据航路规划假设条件,提出了相应的航路规划方法,包括岸基圆周测量法、机舰载圆周测量法、舰载菱形测量法以及机载直线测量法,并重点对机舰载圆周测量法和机载直线测量法进行了航路规划仿真,分析了相应测量平台的运动过程,设计了航迹模拟仿真的APP程序,为实际测量提供了有益参考。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
结构工程师(2022年2期)2022-07-15
舰船科学技术(2021年12期)2021-03-29
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
舰船科学技术(2016年1期)2016-02-27
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
