长出瞳距动态星模拟器投影光学系统设计
2021-12-11 07:57:50张奇徐熙平潘越胡莫同
长春理工大学学报(自然科学版) 2021年6期
张奇,徐熙平,潘越,胡莫同
(长春理工大学 光电工程学院,长春 130022)
空间姿态参数的测量对航天器的运行起着至关重要的作用。星敏感器作为测量和捕获航天器姿态的一种装置被广泛应用[1]。星敏感器在上天前需要对其进行检测和标定,常见的标定方法一共有两种。第一种是在远离城市的山区对已知恒星进行拍照,通过图像处理的方法对星敏感器进行标定。但是这种方法对自然环境的要求比较苛刻,有的时候可能很长时间都无法采集到想要的数据。第二种方法是在实验室设计星模拟器,模拟恒星发光,即对星敏感器进行半实物仿真测试。两种方法比较,后者可在实验室环境下模拟星场图像,实验条件可控,突破了星敏感器地面标定实验的局限性,同时增强了星敏感器在真实工作环境中的稳定性,为其提供可靠的溯源依据,是完善航天技术的重要组成部分[2]。星模拟器根据工作方式的不同又可分为动态星模拟器和静态星模拟器。其中,静态星模拟器主要由点光源和一系列滤光片组成,星图是固定不变的,为了模拟不同天区的星图,需要更换不同的星点板;动态星模拟器主要用于星敏感器的功能测试,通常与星敏感器和主计算机组成测试系统,从而使星敏感器能实时观测模拟的星场图像。在半实物仿真测试中,星模拟器需安装于大型五轴转台上,以完成闭环测试。为了满足测试需求,保证投影系统出瞳与待检系统入瞳衔接,提出了一种超长出瞳距动态星模拟器光学系统设计方案,本文主要对其投影光学系统进行设计和优化,保证光学系统在长出瞳距的情况下具有良好的成像质量,为实现对无穷远处星场的高精度模拟提供光学支撑[3]。
1 动态星模拟器工作原理及组成
动态星模拟器主要包括主控计算机、偏振分光棱镜、LCOS模块、投影系统、照明系统等。如图1所示,在工作过程中,光源发出的光经过照明光学系统后入射于PBS棱镜上,照明系统的作用主要是提高照明均匀性和能量利用率。经过PBS棱镜的自然光被调制为偏振光,并入射到LCOS模块。LCOS模块根据主控计算机上传的星图图像对入射偏振光束进行空间光调制,调制后的光束被投影系统准直并投射于出瞳位置,从而完成对无穷远星图的模拟。在半实物仿真测试过程中,星模拟器与星敏感器被固定于五轴运动转台上,两者相对位置不变,并保证光瞳衔接,星敏感器根据观测到的模拟星图做出正确反馈,则带动五轴转台转动,从而完成其功能测试[4]。
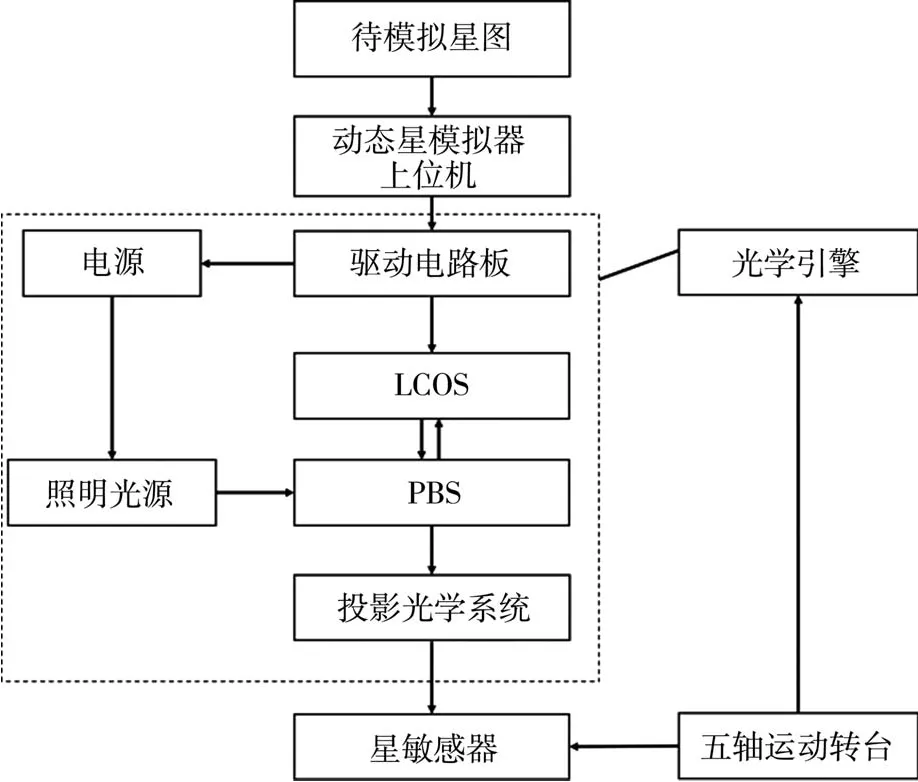
图1 动态星模拟器工作原理
LCOS与液晶的工作原理相同,需要入射光束为偏振光。选用消光比为1 000∶1的偏振分光(Polarization Beam Splitter,PBS)棱镜作为偏振器件,使入射光线分解成振动方向互相垂直的两束波,一束是光矢量平行于入射面的P波,另一部分是光矢量垂直于入射面的S波。其中P波偏振光线透射,S波偏振光线反射,并进入LCOS器件,调制后的光束偏振态会发生改变,并经过PBS棱镜再次透射进入投影系统。在没有偏振转化系统(Polarization Conversion System,PCS)的情况下,PBS棱镜的光学效率约为44%。
2 光学系统设计
2.1 光学系统参数
在动态星模拟器中,投影光学系统由于与待检系统对接,因此其投影图像质量直接决定了星模拟器的测试精度。在进行光学系统的设计时,为了防止星模拟器的光信号传递到星敏感器的时候有较大损失,在满足光瞳衔接原则的前提下,同时要保证星模拟器的出瞳大于星敏感器的入瞳。由于动态星模拟器为星敏感器的地面标定器件,根据星敏感器的测试需求,本文设计的星模拟器出瞳距为1 250 mm,出瞳口径为 45 mm,视场为 4°,工作波长为 0.45~1 μm。LCOS发光尺寸为10.5 mm×10.5 mm,单像元大小为9.5 μm,根据奈奎斯特定律,对光学系统进行评价时调制传递函数应为γ奈奎斯特=1/(2×9.5 μm)=53 lp/mm,根据以上给定参数可以计算出投影光学系统的焦距,以及对应的F数。

星模拟器的设计参数如表1所示

表1 星模拟器设计参数
2.2 光学系统设计过程
动态星模拟器光学系统的初始结构应选择具有消色差、小畸变、大视场和出瞳外置的准直透射式光学系统。因此埃尔弗目镜可作为大视场高精度动态星模拟器光学系统的初始结构,如图2所示。

图2 埃尔弗目镜光路图
根据动态星模拟器光学系统技术指标要求,光学系统出瞳距为45 mm,光学系统焦距f=300.7 mm。优化设计时在光学系统后截距处加入了PBS棱镜,优化后可以减少分光棱镜对准直光学系统像质的影响,PBS棱镜材料为H-K9L。对初始结构埃尔弗目镜准直光学系统进行缩放。由于系统光阑前置,光学系统结构的失对称更加严重。为了抵消像差,在优化的过程中将双胶透镜分离,增加校正像差的变量。为了获得较大的后截距,将前面的双胶合透镜分离,并使负透镜尽量弯向光阑,适当增大正透镜的光焦度。调整各透镜的整体弯曲程度,达到校正畸变的目的。将系统后面的双胶合透镜分离,负透镜远离正透镜,尽可能地靠近像面,达到平衡光学系统的像散和场曲的目的。对于星模拟器光学系统,色差对像质的影响较大,需要校正的是倍率色差和位置色差,如果存在二级光谱,也会导致星点清晰度下降。因此在设计时要注意减小系统色差。
2.3 光学系统设计结果
光学系统的最终设计结果为:焦距300.85 mm,像高10.474 mm,出瞳距1 250 mm,光学系统总长度365.1 mm。系统的光路图如图3所示。

图3 投影光学系统光路示意图
3 投影光学系统分析
3.1 像质分析
通过ZEMAX软件对投影光学系统进行像质分析,光学系统的各像差曲线如图4—图8所示,对各个曲线进行分析,结果表明投影光学系统满足设计要求。

图4 投影光学系统场曲和畸变曲线

图5 投影光学系统点列图
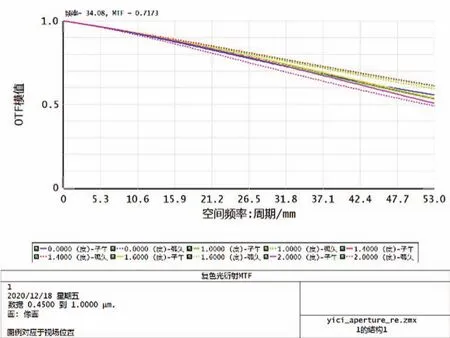
图6 投影光学系统MTF值

图7 投影光学系统点扩散函数

图8 投影光学系统能量集中曲线
(1)场曲和畸变
从星模拟器的使用要求考虑,光学系统需要清晰的成像并且具有较高的成像位置精度,这主要取决于系统的场曲和畸变。光学系统的场曲是轴外点光束像差,光学系统的畸变是轴外点主光线像差,两者都只与视场有关,即视场不同,场曲值和畸变值也不同。图4为光学系统的场曲和畸变曲线。从场曲曲线中可以看出,光学系统的全视场场曲均小于0.133 5 mm。从畸变曲线中可以看出,光学系统的最大畸变为0.460 3%,满足光学系统设计小于1%的要求,星间角距的误差影响较小。
(2)点列图
使用点列图来对投影光学系统的成像质量进行评价是一种既容易又比较直观的方式,在判断光学系统优劣时是最常用的方法。光学系统的成像质量可以通过点列图中弥散斑的大小来判断成像质量[5]。
如图5所示,光学系统选用了五个视场,选取的视场为 0°、1.0°、1.4°、1.6°、2.0°。在视场为2.0°时,RMS最大为 4.554 μm,直径小于 LCOS的单像元尺寸9.5 μm,符合设计要求。从点列图整体来看,各视场的能量主要集中在艾里斑范围内,成像质量较好。
(3)调制传递函数(MTF)
调制传递函数(Modulation Transfer Function,MTF)是指不同频率的正弦分布函数经过光学系统成像后对比度的衰减程度,用MTF曲线衡量光学系统成像的优劣是最全面的依据[6]。星图显示器件像元尺寸为9.5 μm,因此MTF最大空间频率选为53 lp/mm,由图6可知,该截止频率对应的各视场下MTF值均大于0.490 3,且接近衍射极限曲线,满足系统的使用要求。
(4)点扩散函数
点扩散函数对光学系统来讲是输入物为一点光源时其输出像的光场分布,描述了一个成像系统对一个点光源(物体)的响应[7]。如图7为投影光学系统最大视场时的点扩散函数,点扩散函数峰值很高并且尖锐,成像质量良好。
(5)能量集中值
能量集中值表达的是各个视场单像元物点在通过投影光学系统后在有效像元尺寸下能量的扩散情况[8]。因为投影光学系统不可能消除掉所有像差,所以成像质量可以根据实际成像衍射斑中心能量和理想成像衍射斑中心能量的比值S.D来进行判断。根据斯托列尔准则:如果S.D的值不低于0.8,则投影光学系统的成像质量良好。如图8所示,在9.5 μm处,弥散斑在一个像元的范围内能量集中度大于80%,设计合理。

图8 徕卡6100A型经纬仪
3.2 公差分析
光学系统优化设计之后,在透镜加工过程中加工透镜曲率和厚度存在机械的加工误差,在装调过程中透镜元件之间的间隔存在装调误差,以及透镜使用的材料等也存在参数误差。光学系统属于精密设计加工部分,想要达到很精准的加工和装调精度是很难办到的,如果光学系统给定的公差不合理,会直接影响到后期的加工和装调进而影响到光学系统的成像质量。所以对规划后的光学系统进行公差分析是非常有必要的。
经过公差分析得到光学系统的后截距最小变化量为-0.126 594 mm,最大变化量为0.195 643 mm,平均变化量为0.010 31 mm,标准偏差为0.069 432 mm,可以得出像面位置在公差分析过程中基本不变。
MTF分析结果如表2所示。
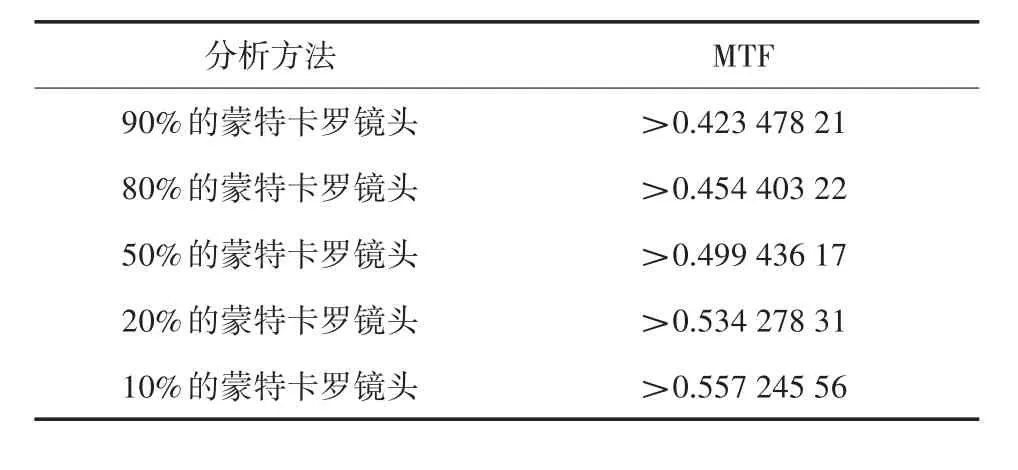
表2 MTF分析结果
预测大视场高精度动态星模拟光学系统MTF将下降0.134,仍然满足动态星模拟器光学系统的设计指标要求。
4 光学系统的精度分析
长出瞳距动态星模拟器的光学系统设计完成后,需要对其星间角距的模拟精度分析[9]。如果将光学系统假设为理想光学系统,则所设计的理想光学系统最大畸变为0.004 2 mm,可计算得出因畸变而产生的误差δ1为:

根据所设计的投影光学系统自身出射光准直精度的计算结果,可得最大视场的准直精度δ2为:
经纬仪在对准和测试时会存在震动等因素从而引起误差。这里设备误差δ3为:

3项误差合成为:

通过上述计算可知,光学系统的设计结果可以满足长出瞳距动态星模拟器星间角距要求。
5 光学系统的实验
动态星模拟器组装调试完毕之后,点亮照明光源,使用经纬仪测量其视场内每个星点的方位角与俯仰角。测试时,看到的星点亮度已经是人眼所能识别出的最大星等。经纬仪自带的光源不是照明光源的白光光源,所以测试时建议不使用它的光源。尽量不要在阴暗的环境下测试,给测试人员的测试带来不便,增加测量误差。
(1)将经纬仪与动态星模拟器放在同一光学平台上,并使其光轴处在同一高度。
(2)点亮照明光源,找出视场内的中心星点位置,用经纬仪测出中心点坐标。
(3)测量出其他待测星点在经纬仪中的坐标。
(4)计算任意两个星点之间的星间角距,与理论值作差值,得到星间角距误差。
LCOS单个像元大小为9.5 μm,开口率92%,已知动态星模拟器焦距为300.85 mm,则:
在空间光调制器上打出一幅标准星图,星图包含已知的11个星点,使用徕卡6100A型经纬仪,如图 8所示,读取星点位置[10],由式(8)可求得任意两星点星间角距误差:

式中,α为空间调制器上两星点间距离;f为焦距;θ为星点位置的实测结果。根据测量得到的数据,通过对星间角距误差的计算,得到星图上所有星点之间星间角距的误差,如图9所示。测试结果显示,所有星对的星间角距误差小于13″,满足技术指标要求。

图9 星间角距误差图
6 结论
为满足星敏感器的半实物仿真测试需求,本文设计了一种用于星模拟器的超长出瞳距投影镜头。首先介绍了动态星模拟器的构成和工作原理,根据星敏感器地面标定的要求,确定动态星模拟器投影光学系统的设计参数,使用ZEMAX软件对投影光学系统进行设计,之后通过序列光线追迹方法对投影图像的质量进行了评价,设计结果表明其符合使用要求。通过对动态星模拟器的星间角距误差进行计算,其精度分析结果表明误差为8″,最后通过经纬仪进行实际测试,结果表明星间角距实际小于13″,符合动态星模拟器的使用要求。
猜你喜欢
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
中国光学(2021年6期)2021-11-25 07:48:32
空间科学学报(2020年3期)2020-07-24 09:23:28
中国医疗设备(2019年1期)2019-01-15 12:10:54
测绘科学与工程(2017年4期)2017-05-25 01:48:16
中成药(2016年4期)2016-05-17 06:08:05
测绘科学与工程(2016年4期)2016-04-17 06:51:10
激光与红外(2015年10期)2015-03-23 06:07:18
中成药(2014年9期)2014-02-28 22:28:51
测绘科学与工程(2014年3期)2014-02-27 07:06:00