
基于森林火灾的多类型无人机布局与控制方法
2021-12-11 10:43:18朱连熙颜康龙罗嘉俊
科技与创新 2021年23期
朱连熙,颜康龙,罗嘉俊
(北京邮电大学世纪学院,北京102100)
2019-11,澳大利亚东部丛林大火肆虐,灾情继续加剧。到现在火已经烧了4个多月了。这片土地的燃烧面积已经超过26万km2,整个澳大利亚大陆的1/3被厚厚的白烟覆盖。近3 000栋房屋倒塌成瓦砾,数十人在大火中丧生。
经过研究,决定建立两个合理且具有成本效益的解决方案。首先,我们将使用第一种解决方案来解决SSA无人机和无线电中继无人机的最佳数量和混合比。在第二个计划中,我们将建立一个模型来优化超高频悬挂式甚高频/超高频无线电中继器的位置,以应对不同地形上不同规模的火灾。
同时,还将分析和预测澳大利亚未来的森林火灾趋势,并从获得的数据中优化之前设定的计划。我们认为该模型不应过分简化飞行限制。传统的无人机协同控制算法没有考虑地形对无人机飞行控制的影响,没有基于森林火灾热辐射等因素设置无人机安全飞行约束,也没有考虑风速的影响。忽略了无人机飞行的影响和烟雾对观测的阻碍作用。因此,我们团队针对澳大利亚森林火灾的背景,提出了多种无人机分布式双层控制方法(MUBD模型),如图1所示。
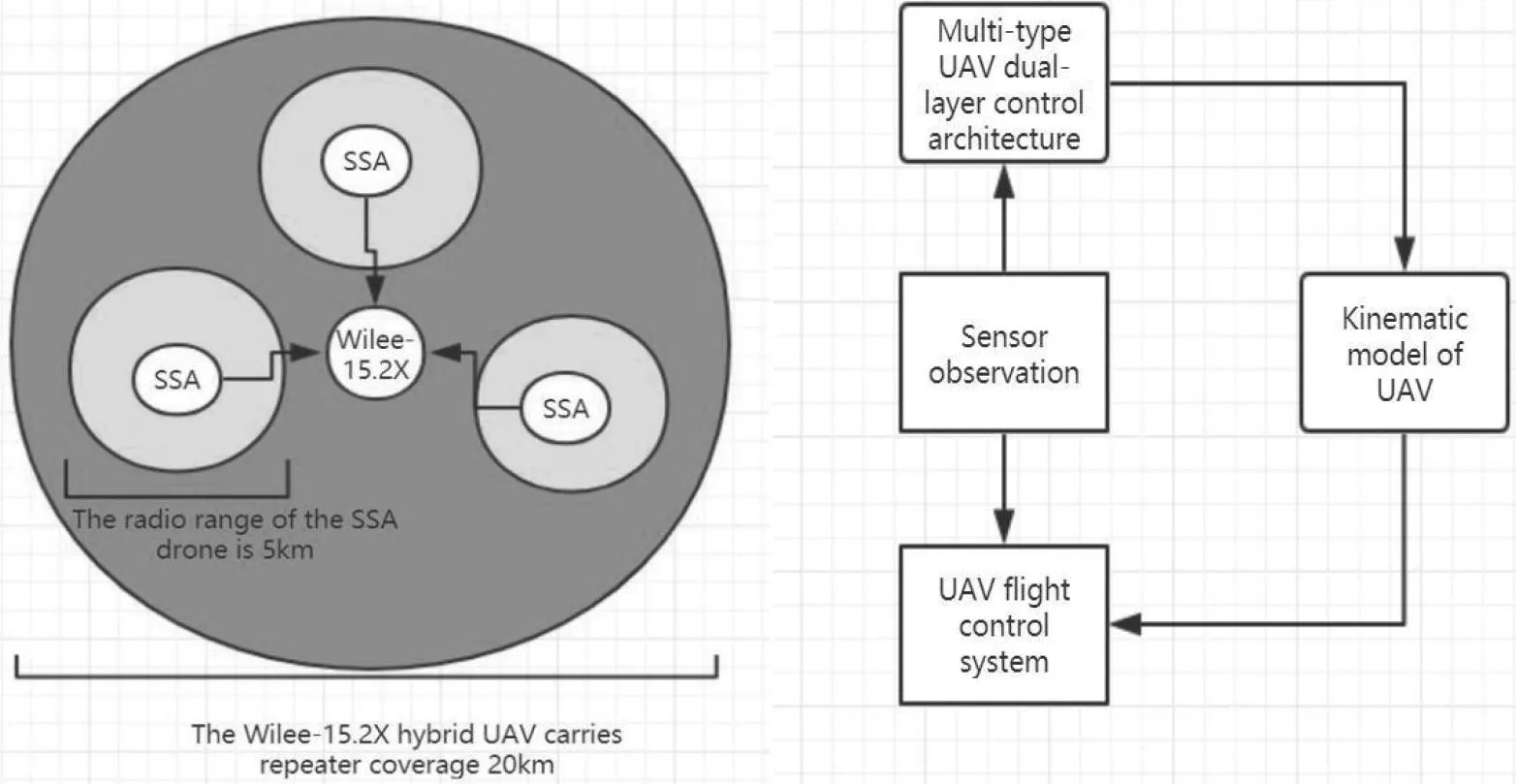
图1 基于两个模型构想的MUBD模型的基本部署和控制
1 模型的建立
在森林火灾蔓延的研究中,最常用的模型之一是元胞自动机。元胞自动机是研究复杂系统的典型方法,特别适用于研究空间复杂系统的时空动态模拟。在细胞自动机中,空间被离散成网格,每个网格称为一个单元。细胞具有有限的离散状态,遵循相同的作用规则,并按照一定的局部规则同步更新。大量的细胞通过简单的相互作用形成了一个动态系统的演化。
经典的森林火灾元胞自动机模型是由德罗塞尔和施沃布尔于1992年提出的。森林火灾的元胞自动机模型是在正方形网格上定义的。细胞有三种状态:树(未燃烧的树)、火(燃烧的树)和空(开放的地面)状态。单元格下一状态的更新规则如下。
着火:如果一个单元格的状态是“树”,相邻4个单元格的状态是“火”,那么下一刻单元格的状态就会从“树”变成“火”,用来模拟火的蔓延。另外,一个状态为“树”的细胞,也会以很低的概率变成“火”,来模拟一次闪电引起的火灾。
燃尽:状态为“火”的细胞在下一刻会变成“空”,用来模拟一定时间后燃烧的树。
在以上规则中,火规则中的闪电和新生规则都涉及概率,反映了模型在演化过程中的随机性和不确定性。
接下来,将改进的森林火灾元胞自动机模型应用于澳大利亚,需要基于澳大利亚植被来构造元胞自动机的初始状态。
植被覆盖率低的起火点在蔓延一小块区域后自动熄灭。但多个植被覆盖率高的火点继续蔓延融合在一起,最终形成巨大的森林火灾。这说明植被的覆盖度决定了是否能形成大规模的火灾,换句话说,即如果没有植被,火会切断燃料,当然很难形成大规模的火灾。如果考虑风向的影响,不失一般性,我们以西风为例,模拟结果如图2所示。结果表明,火势有向风的方向蔓延的趋势。
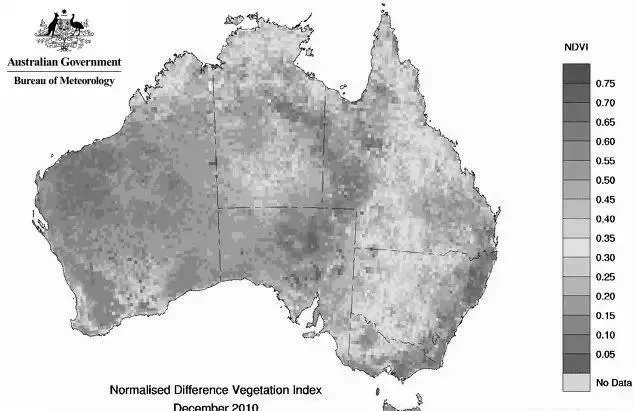
图2 2010年澳大利亚归一化植被指数图
2 灵敏度测试
基于优化后的模型,我们结合MATLAB和GIS等软件进行仿真,得到了一系列结果,如图3所示,证实了在特定风速下混合无人机的最佳位置。

图3 MATLAB模型仿真结果
3 结论
我们以元胞自动机为基础,基于澳大利亚的风况,对模型进行了改进,并对未来十年澳大利亚东南部的火灾进行了MATLAB仿真。MUBD模型只是一个粗略的架构模型,并不是很完整。我们希望通过以后的研究,把模型建成一个完整的系统,这样可以解决更多的问题。
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:50
数学大王·趣味逻辑(2020年6期)2020-06-22 07:48:15
数学大王·趣味逻辑(2020年5期)2020-06-19 08:49:28
智富时代(2019年4期)2019-06-01 07:35:00
智富时代(2018年5期)2018-07-18 17:52:04
西部皮革(2018年6期)2018-05-07 06:41:07
西北大学学报(自然科学版)(2018年2期)2018-04-18 06:53:55
北京测绘(2016年2期)2016-01-24 02:28:28
中国航海(2014年1期)2014-05-09 07:54:25
杭州电子科技大学学报(自然科学版)(2012年4期)2012-11-26 09:01:38
