导引头伺服系统稳定回路扰动观测器设计
2021-12-10 08:50赵明翰郑秋实顾家玮韩道达李乃星
制导与引信 2021年3期
赵明翰, 郑秋实, 顾家玮, 韩道达, 李乃星
(上海无线电设备研究所,上海 201109)
0 引言
导引头是导弹的重要组成部分,其测量精度将直接影响导弹的性能。随着军事现代化的不断发展,现代化武器对导引头测量精度提出了更高的要求。传统的导引头伺服系统大多采用线性超前滞后的方法来设计控制器,这种方法设计的控制器具有设计简单、调试方便的优点,但是对系统中的干扰力矩和不确定因素的抑制能力有限。为了进一步提高导引头伺服系统的精度,需要对设计方法进行优化。
导引头伺服系统主要有三种工作状态:预定回路、稳定回路和跟踪回路,三个回路分别完成不同的任务[1-2]。稳定回路用于保证天线中心轴在惯性空间中的指向稳定。由于导弹弹体在飞行过程中存在扰动,所以需要通过导引头伺服系统反向偏转来维持天线中心轴在惯性空间中指向稳定。由于系统中存在较为明显的摩擦力矩和机构传动间隙,且不同环境条件下摩擦力矩和机构传动间隙还存在变化的可能性,传统的线性超前滞后控制器对于上述非线性环节的抑制效果不尽如人意,需要进一步优化相关设计。文献[3]采用双口内模控制的方法提高了去耦性能,并获得了较好的鲁棒性。另外自抗扰控制[4-8]、自适应模糊比例-积分-微分(PID)控制[9]、自适应内模控制[10]、扰动观测器[11-12]等方法在非线性环节抑制方面的应用,均取得了一定的效果。
这里需要指出的是,导引头伺服系统的摩擦力矩和机构传动间隙较易受到环境变化的影响。不同的环境温度、湿度以及润滑情况都会对摩擦力矩和机构传动间隙产生较为明显的影响,所以常见的静态补偿方法并不能获得理想的非线性环节抑制效果,需要采用动态补偿的方法来优化控制系统性能。
1 系统建模
导引头稳定回路的主要功能是隔离导弹飞行过程中弹体的扰动,保证天线中心轴在惯性空间中指向稳定。其工作原理如图1所示。
图1 稳定回路工作原理框图
图1中被控对象由电机和负载组成,其动力学方程为

由于系统中的电机选用的是直流电机,根据电磁感应原理和动力学原理,描述直流电机动态特性的时域方程可以表示为
式中:Tem(t)为电磁转矩;Kt为转矩系数;Ia(t)为电枢电流;Ea(t)为电枢反电势;Ke为反电势系数;ω(t)为电机转子的角速度;Tc(t)为干扰力矩;Ua(t)为电枢两端输入电压;La为电枢电感;Ra为电枢电阻。
对式(2)进行零初始条件的拉普拉斯变换,可以得到
式中:Ω(s)为电机转子角速度ω(t)的拉普拉斯变换。
由于式(3)中的干扰力矩Tc(s)主要受摩擦、死区、间隙等典型非线性环节影响,因此在处理的过程中,将这部分干扰力矩单独提出,作为整体传递函数中的非线性环节。将剩余的环节线性化后,可以得到以角速度为输出、电压为输入的直流电机传递函数

式中:τm,τe分别表示机械时间常数和电磁时间常数。
代入相关参数后得到的直流电机传递函数为

由于被控对象在实际的机械系统中存在摩擦,导致系统存在一个不可忽略的死区非线性环节。角速度传感器可以近似为一个比例环节,陀螺的传递函数为

机电伺服系统由于存在机械传动链,不可避免会出现谐振现象。针对机械传动结构中存在的不易建模部分,对机械传动系统进行扫频,将得到的结果进行数据拟合,得到的不易建模的两个环节的传递函数为
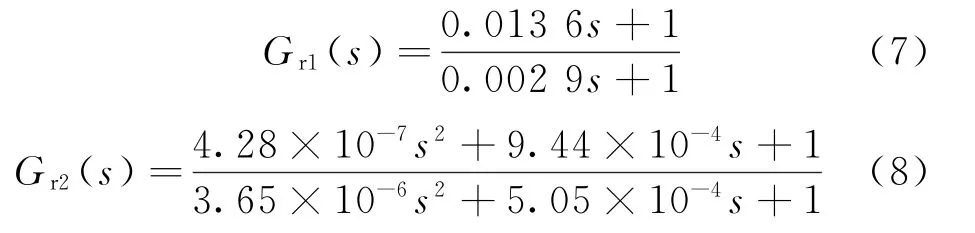
最终得到的被控对象的传递函数为

2 扰动观测器设计
对于系统中存在的摩擦干扰力矩,通常采用基于模型的补偿方法。先对摩擦力矩进行建模分析,再对实际系统的参数进行辨识,获取摩擦力矩模型的具体参数,最后在控制器中对摩擦干扰力矩进行补偿。这种方法是一种静态补偿的方法。当系统中的摩擦力矩相对稳定时,静态补偿可以获得比较好的补偿效果。但如果摩擦力矩本身具有一定的不确定性,或者在进行建模辨识的过程中出现了一定的偏差,静态补偿就难以获得理想的补偿效果,需进行动态补偿。
动态补偿的方法主要有两种。一种是采用基于状态反馈的扰动观测器,通过观测系统的状态变量来对系统进行实时补偿。这种方法相对复杂,要求相关的状态变量具有能观性,且需在设计扰动观测器的同时完成状态反馈控制器的设计。另一种是采用基于输出反馈的扰动观测器,通过将系统实际输出与名义输出进行比较来对系统的摩擦干扰力矩进行实时补偿。这种方法结构简单,不需要知道系统中的状态变量信息,仅仅依靠系统输出就可以完成扰动的实时补偿[13]。
当导引头伺服系统摩擦模型相对复杂,相关参数辨识困难,且系统处于不同环境条件时,摩擦参数存在较明显的差异,基于模型的补偿方法无法解决导引头伺服系统中由于摩擦引入的干扰力矩问题。
将式(9)得到的模型用状态空间方程[14-15]表示,表达式为

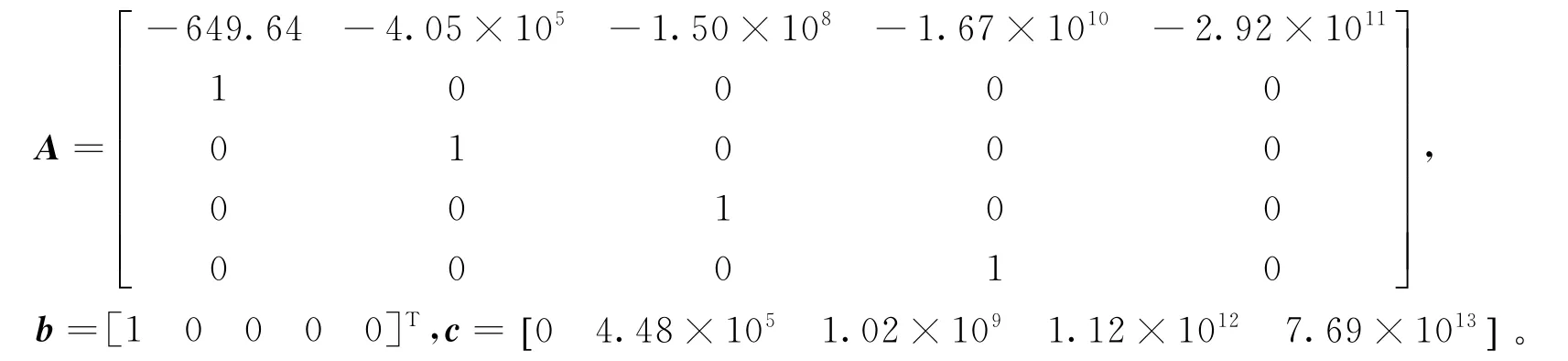
经计算可知,能观矩阵Qc=[c cA c A2cA3cA4]T的秩为4,按照能观性判据,系统不完全能观,所以不能采用状态观测的方法来进行扰动的实时补偿。故选择第二种补偿方式,利用输入输出信息对系统扰动进行实时补偿。基于输出反馈的扰动观测器框图如图2所示。
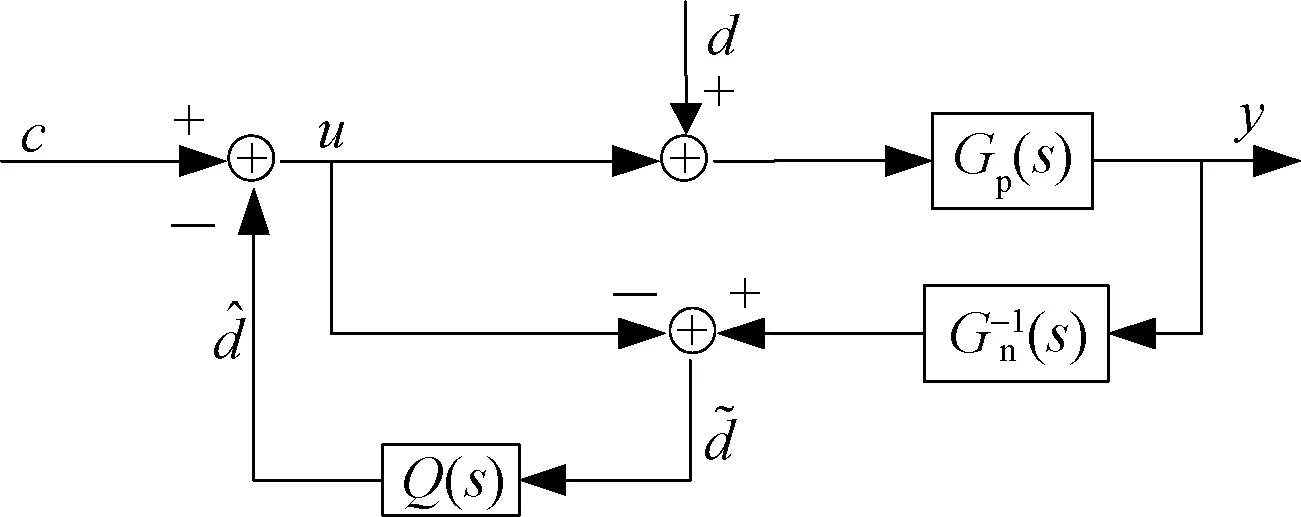
图2 基于输出反馈的扰动观测器
由于在实际工程实践中,名义对象的传递函数求逆通常不能实现,所以将图2进行适当简化变形得到图3。
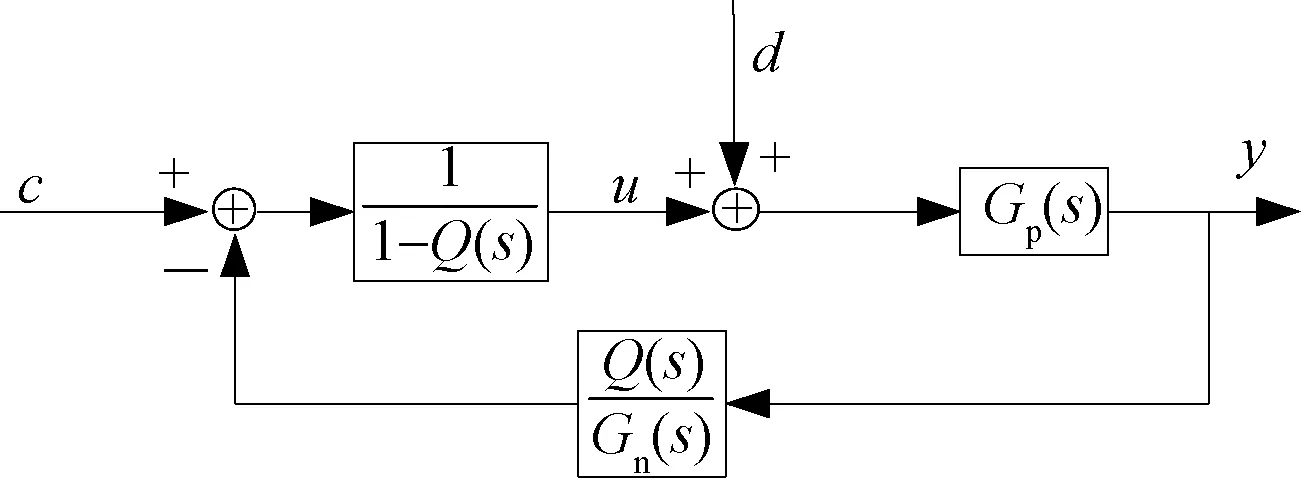
图3 简化变形后的扰动观测器
在实际系统中,由于传感器并不理想,导致其输出中往往会叠加量测噪声,所以需要分析设计的扰动观测器对量测噪声的响应情况。含有量测噪声的扰动观测器框图如图4所示。
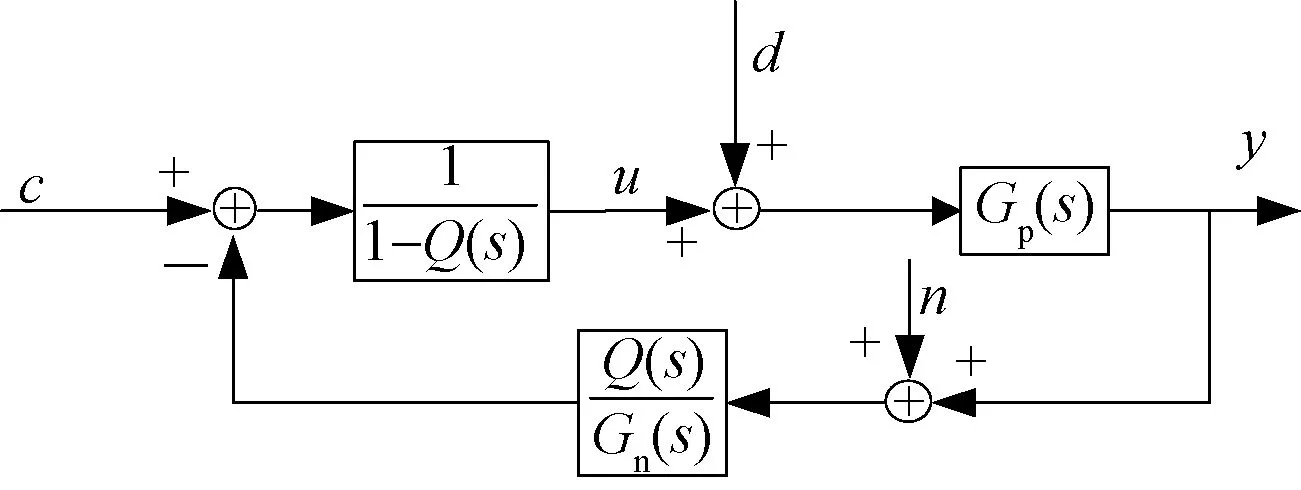
图4 含噪声的扰动观测器
由图4可知,扰动-输出的传递函数Gdy(s)和噪声-输出的传递函数Gny(s)分别为
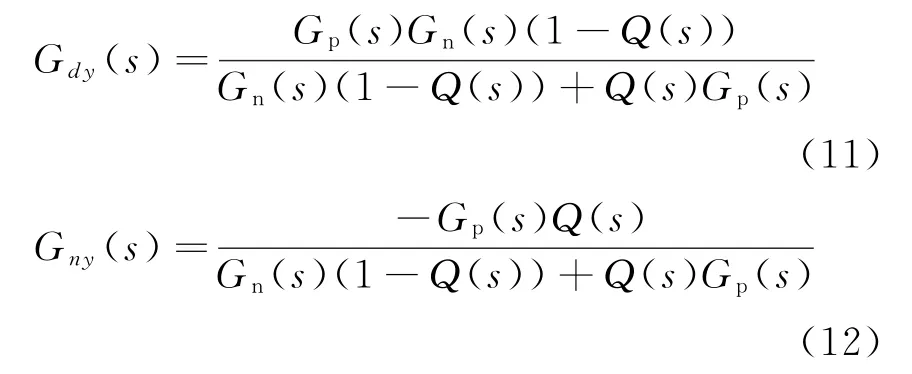
由式(11)和式(12)可知,在低频段内,Q(s)趋近于1时,能够抑制扰动信号;在高频段内,Q(s)趋近于0时,能够避免传感器量测噪声对系统的影响。基于上述原则对Q(s)进行设计,由于被控对象是二阶的,则

式中:τ为低通滤波器的时间常数。从带宽和鲁棒性两个角度考虑,最终确定τ=0.006 2。
3 仿真验证
为了验证导引头伺服系统稳定回路中扰动观测器对非线性环节和噪声的抑制效果,分别施加两种正弦信号,验证系统性能。施加的正弦信号

式中:A为正弦信号幅度,取值为0.1 rad/s;f为正弦信号的频率,取值分别为1 Hz和3 Hz。
对于稳定回路而言,衡量其性能的指标是去耦系数K,计算公式为

式中:ωθ表示视线角速度输入为0时,天线中心轴相对惯性空间转动的角速度;ωϑ表示弹体相对惯性空间转动的角速度。
当不考虑系统中的非线性环节及相关扰动时,天线中心轴角速度仿真结果如图5所示。
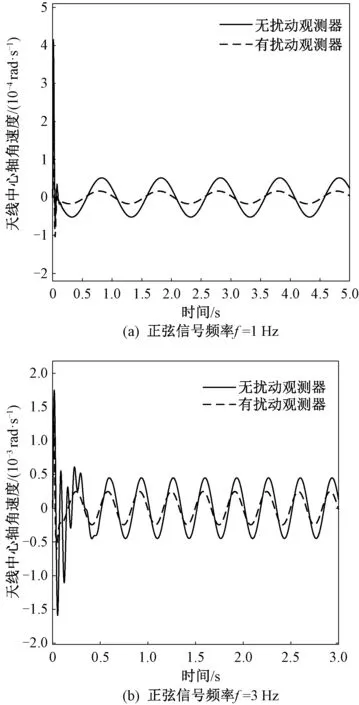
图5 不考虑系统非线性时天线中心轴角速度
可以看出,当不考虑系统中的非线性环节时,使用扰动观测器能够较为明显地提高系统的去耦能力。对应的指标如表1所示。
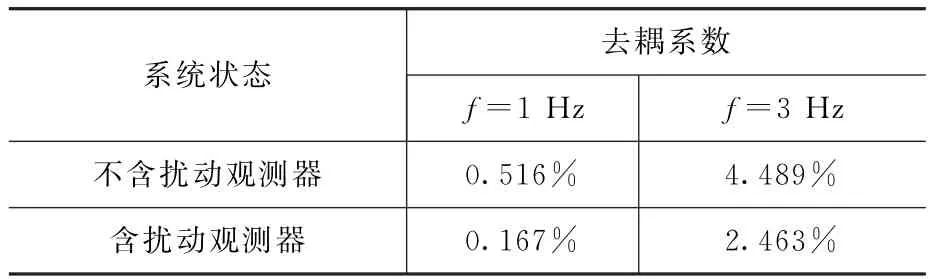
表1 不考虑系统非线性情况下的去耦系数
由于摩擦环节的存在,当电机力矩小于最大静摩擦时,对外输出力矩为0。只有当电机力矩大于最大静摩擦时,才能对外输出力矩。为了简化仿真过程,将系统中的摩擦环节等效为死区非线性环节。当考虑系统中的非线性环节时,天线中心轴角速度仿真结果如图6所示。
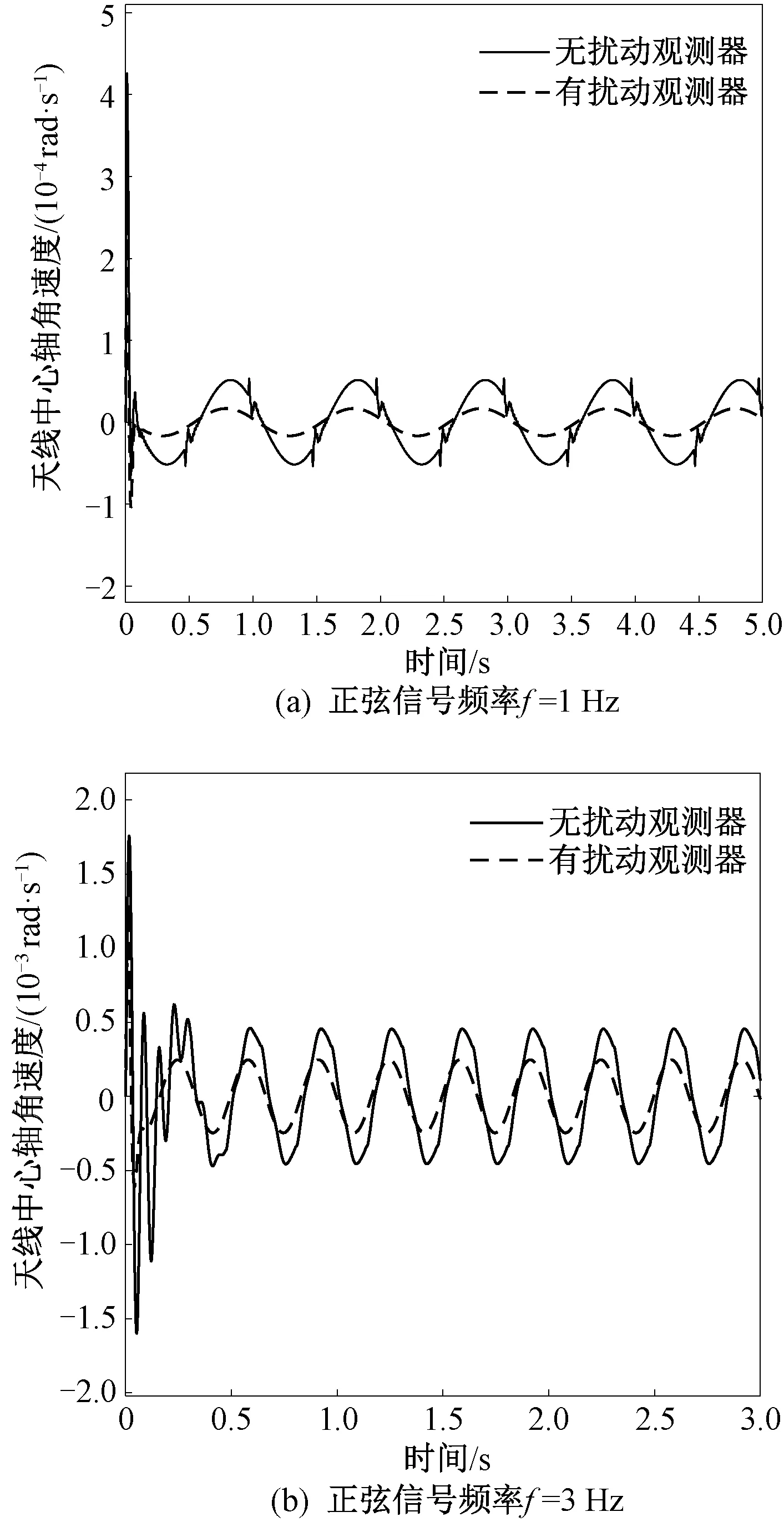
图6 考虑系统非线性时天线中心轴角速度
可以看出,当考虑系统中存在的非线性环节时,天线中心轴角速度曲线出现了畸变,系统的去耦性能出现了一定程度的下降。具体的指标见表2。
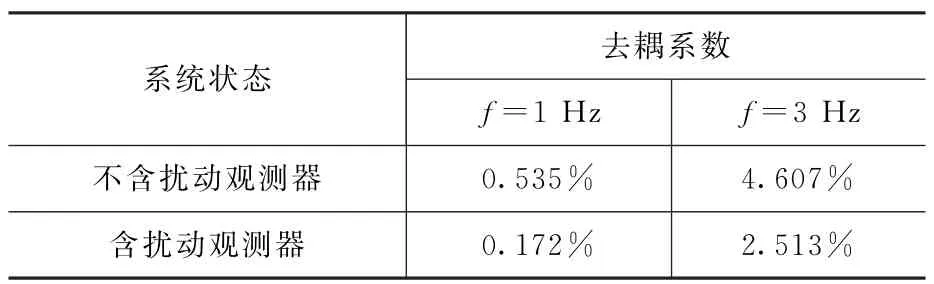
表2 考虑系统非线性情况下的去耦系数
当考虑传感器噪声时,天线中心轴角速度仿真结果如图7所示。其中噪声为白噪声,对应的功率谱密度为10-9rad2/s。此时对应的去耦性能指标见表3。可以看出,当系统中存在传感器噪声时,稳定回路的去耦性能会受到影响,但影响程度有限。在抑制噪声方面,尽管扰动观测器对噪声的抑制能力有限,但使用扰动观测器依旧能够获得更好的去耦性能。
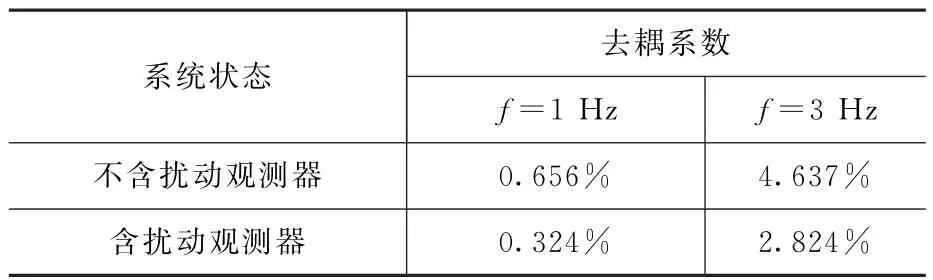
表3 考虑传感器噪声时的去耦系数
4 结束语
导引头伺服系统稳定回路的功能是保持天线中心轴在惯性空间中指向稳定。但是由于导引头伺服系统固有的工作特点,导致采用基于模型的方法无法对摩擦环节引入的干扰力矩进行补偿。采用基于输出反馈的扰动观测估计方法对扰动进行动态补偿,可以获取更好的稳定回路去耦效果。同时,通过理论分析与仿真验证,证明了本文设计的扰动观测器能够在存在量测噪声的情况下获得较为理想的去耦效果。
猜你喜欢
微电机(2022年8期)2022-10-12
建材发展导向(2022年18期)2022-09-22
火力与指挥控制(2022年6期)2022-07-25
计算机与数字工程(2022年4期)2022-05-10
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
科技视界(2017年15期)2017-10-28
软件导刊(2015年8期)2015-09-18
电子技术与软件工程(2015年6期)2015-04-20