
民用机场净空“低小慢”飞行器风险评估
2021-12-10 02:48曹铁周科杰甄军平李海博房天谋
现代计算机 2021年30期
曹铁,周科杰,甄军平,李海博,房天谋
(民航成都电子技术有限责任公司,成都 611430)
0 引言
民用机场的净空范围主要是指沿民航飞机起降航线设置的一个没有超高障碍物的区域,用来保障民航飞机的起降安全[1]。近年来,随着“低小慢”航空器的不断发展,在净空保护区内出现“低小慢”飞行器的净空风险案例越来越多,一旦这些飞行物达到一定高度或是一旦失去控制,很容易漂移到航道上,构成飞机安全隐患,影响航班正常起降。传统的“低小慢”航空器主要是航空模型和空飘物,近年来无人机引领了“低小慢”航空器的发展方向。近些年,由于缺乏适当的引导和管理,“低小慢”航空器频繁闯入各地机场净空保护区造成多次航班延误,对民航飞行安全构成了严重威胁。因此,有必要对闯入净空区的低小慢物体进行风险评估,科学地指导和管理净空安全。
目前,民航机场主要采用碰撞理论来分析无人机、鸟群等对飞机碰撞的条件,通过这些条件来对无人机和飞机的碰撞进行风险评估[2-3],这些方法没有考虑机场净空安全区的地理信息和飞机航班信息,只是通过所建立的碰撞模型分析出无人机或鸟群距离飞机的最小飞行距离或者分析出了无人机的最小安全的路线以规避民航客机等。文献[4]采用了层次分析法建立鸟群对于飞机飞行的风险评估模型,但模型中忽略了机场净空区信息。
近几年,外辐射源雷达技术不断发展完善,开始能够提供机场净空区域内“低小慢”飞行物的信息,为实时风险评估提供了新的技术手段[5]。基于此,本文设计了一种实时“低小慢”航空器风险评估方法,通过机场外辐射雷达实时采集的航空器飞行数据和ADS-B[6]提供的民航飞机实时飞行数据,结合机场净空保护区信息建立风险评估模型。
1 机场净空区域的组成和净空区坐标系的建立和坐标的转化
1.1 机场净空区域的组成和净空区坐标系的建立
机场净空区是为了保证飞机起飞降落的飞行安全,在机场周围划定的限制障碍物高度的空间区域,用来保障航空器的起飞降落安全。障碍物限制面的大小取决于跑道的类别和进近类型。障碍物限制面主要有内水平面、进近面、过渡面、内进近面、内过渡面、复飞面、起飞爬升面[7],各个限制面的位置示意图如图1所示。因此,为了统一航空器信息、低小慢物体信息和净空区域的信息,如图2所示建立净空安全坐标系,净空坐标系的原点在跑道左端边界的中心处,设该坐标系为O w-(X w,Y w,Z w)。
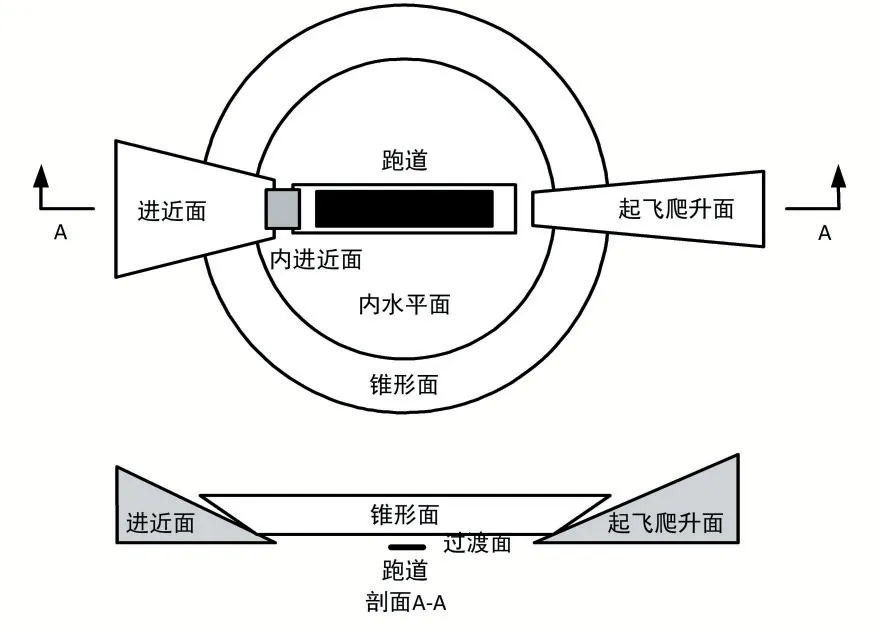
图1 净空区的组成
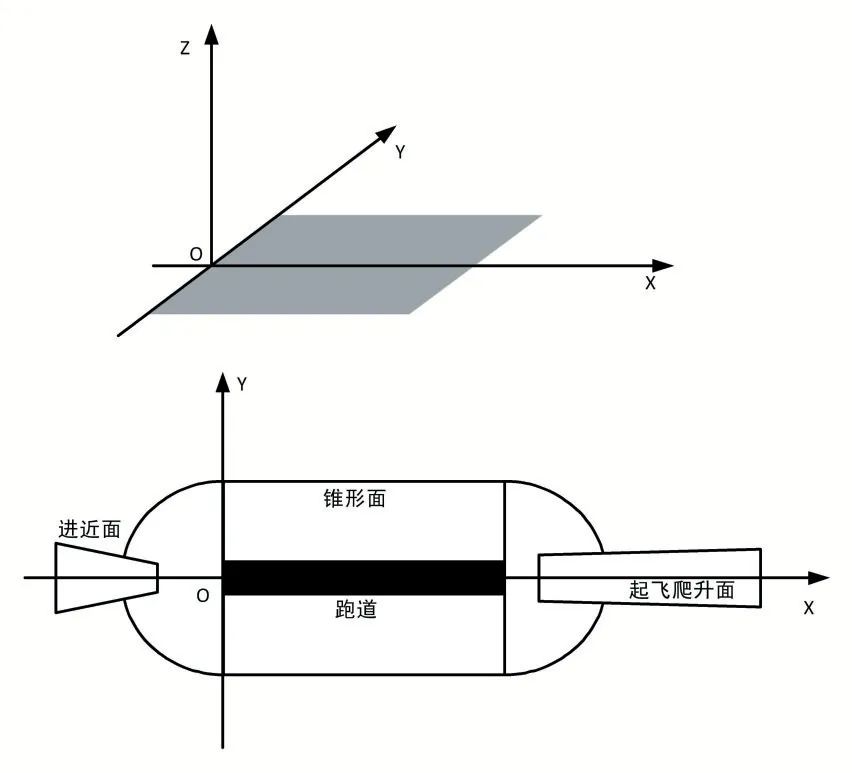
图2 净空坐标系
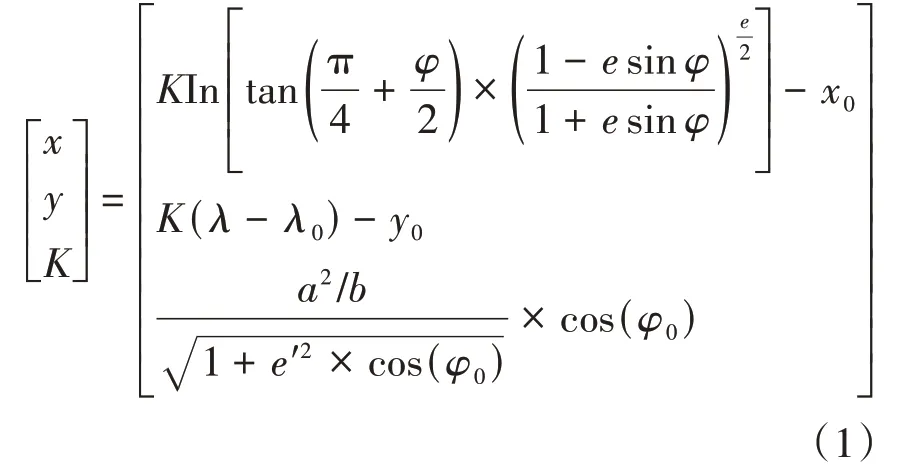
1.2 经纬度坐标与直角坐标的转化
ADS-B和外辐射源雷达得到的“低小慢”的位置信息都是基于世界大地坐标系统84坐标(WorldGeodicalSystem-84,WGS-84,即卡莫托投影),对于距离和位置的判断十分不便。因此,通过投影转换将数据所包含的经纬度信息转换为净空安全坐标。将飞机航班的经纬度和“低小慢”飞行物的经纬度信息转化为第二节建立的净空安全坐标系下坐标的公式如式(1)所示。式中,a为地球长半轴,b为地球短半轴,e为第一偏心率,e′为第二偏心率,(φ,λ)为转换点的经纬度,即1.1节中所建立的坐标系,(x0,y0)为跑道中心投影坐标,(φ0,λ0)为赤道与本初子午线交点经纬度。其中a=6378140,b=6356755.29,e2=0.006694,e′2=0.006739。
2 民用机场净空风险评价模型的建立
常用的风险评估方法根据定量化程度的高低主要划分为三类:定性评估、定量评估以及定性定量结合的评估方法。定性评估是评估者依据主观认知来对特定对象进行评估,特点是对专家认知经验要求较高,主观性最强。定量评估基于数理统计原理,构建数学模型,并通过数学模型计算出评估对象的各项评价指标来评估,缺点是对数据量要求较高,对现实中的复杂问题难以应用。定性和定量结合的评估方法,通过专家知识弥补定量评估方法数据量需求大的缺点,广泛应用于各类风险评估中。层次=分析法是一种较好的权重确定方法,它是把复杂问题中的各因素划分成相关联的有序层次使之条理化的多目标、多准则的决策方法,是一种定量与定性分析相结合的有效方法[8-9]。
2.1 建立层次结构图
建立如图3所示的净空安全风险评估层次结构图,主要分为航空器(A)和“低小慢”飞行器(B),其中两者之间的距离(D)可以通过A13和B13计算得出。

图3 风险评估层次结构
通过对于风险因素的分析,来确定每个评价指标的重要程度,采用表1所示的评判标准评价进行两两因素之间的比较,并构造比较矩阵表如表2所示。将表2中的对比矩阵转化为矩阵A,矩阵进行一致性检查。若通过一致性检查,计算出该矩阵最大值解特征值对应的特征向量,并将其正规化,得到每个因素的权重w,见表2。

表1 判断矩阵元素的标度方法
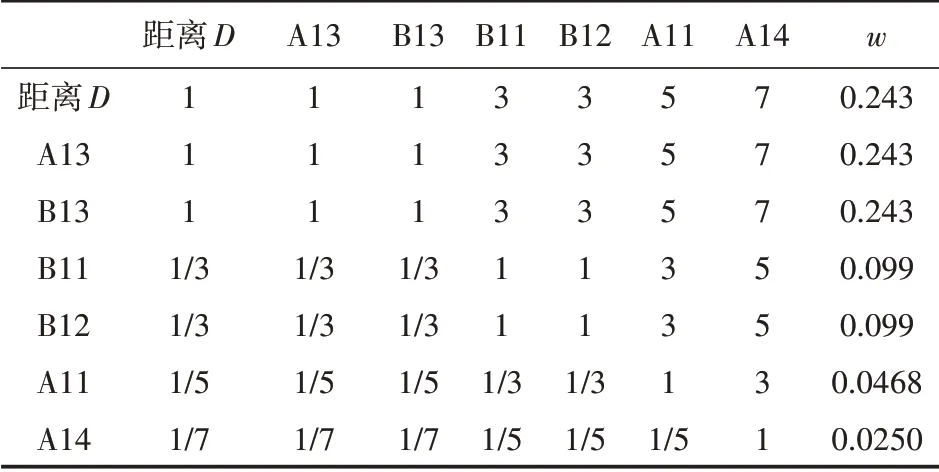
表2 判断矩阵
根据民航机场净空风险情况,将每个风险因素都分成5个等级,且每个等级都对应一定的分值,见表3。

表3 因素分级标准
最终的风险严重程度由公式(2)计算:

在研究了大量参考资料的基础上,将风险严重程度划分为5个等级,即4≤z<5,3≤z<4,2≤z<3,1≤z<2,0≤z<1,并一一对应严重风险、较高危险、中等危险、轻度危险、无危险。当净空区域内出现可疑目标时,可以根据风险值的高低优先制定反制顺序[10]。
3 实测数据
本节以双流机场为例,采用本文提出的风险评估方法进行测试。以双流机场1跑道的一端建立净空坐标系,如图4(a)所示。图4(b)为双流机场的卫星图,图中的红色矩形框为图4(a)所在的区域。在图(a)中O为原点,X,Y坐标如图所示,Z坐标垂直于X,Y坐标,图中并未画出Z坐标。O点的经纬度坐标为(103.94860985,30.5684209)。图5为双流机场净空区示意图。
2016年,泰心医院与多伦多病童医院签署合作协议,双方在儿童医疗、护理、管理、社会心理教育等方面展开一系列交流与支持。2017年2月,泰心医院成立旨在为患儿及家属提供社会、心理和教育支持的社会心理教育组(SPE)。
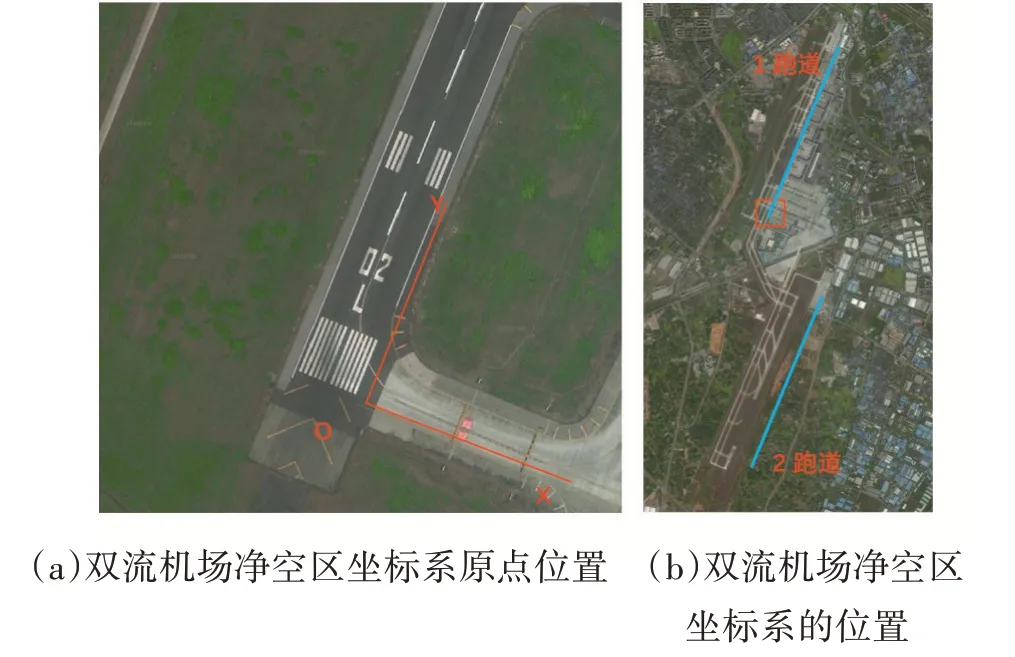
图4 双流机场净空区坐标系
图5 双流机场净空区示意图
图6 中蓝色点的为探测到的无人机,其经纬度坐标为(103.98486097,30.54455809),参数如表4表示,表5为ADS-B获得得航班号信息。计算得无人机与航空器之间得距离为20291.993 m,根据第四节的分类标准,得到表6的信息,根据(2)式可以计算该无人机的风险评估值为z=3.745属于较高危险。

图6 探测到的无人机位置
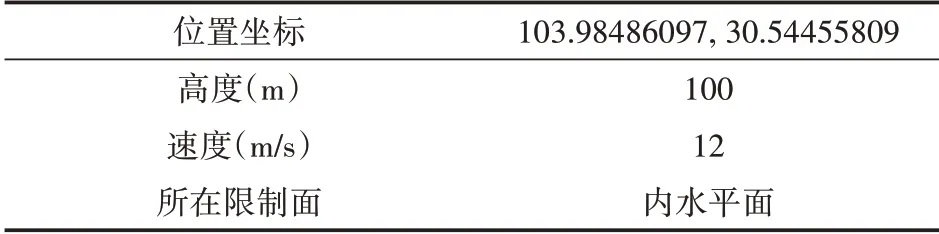
表4 探测的无人机信息
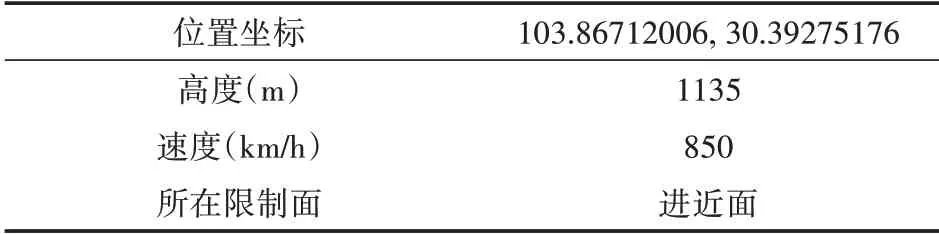
表5 ADS-B航班号信息
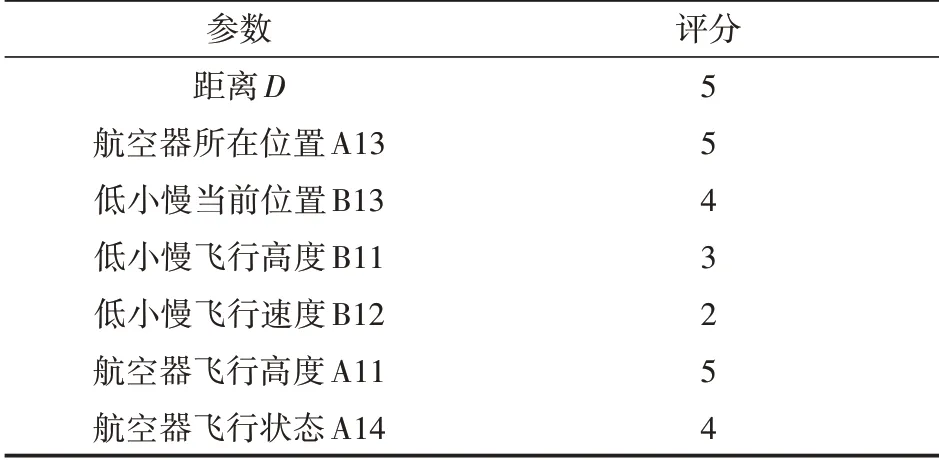
表6 评分表
4 结语
本文提出的机场净空区风险评估方法为机场安全管理人员准确评估“低小慢”飞行器风险,及时采取有力措施提供了依据。本方法结合了外辐射源雷达数据和飞机飞行的航班数据,建立了机场净空安全坐标系,采用层次分析法,对“低小慢”飞行物进行了飞行风险评估。由于本方法基于实时的的信息,目标物的位置能够及时更新。通过现场数据证明该方法可以实时实现民用机场净空安全的风险评估工作。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
西华大学学报(自然科学版)(2022年2期)2022-03-17
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
科技信息·学术版(2021年1期)2021-12-17
科学与财富(2021年33期)2021-05-10
航空维修与工程(2021年1期)2021-04-12
科技资讯(2018年10期)2018-10-26
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01
