
基于法布里-珀罗干涉的光纤倾角传感技术研究
2021-12-07 05:29宋言明孟凡勇祝连庆
激光与红外 2021年11期
王 帅,吴 越,宋言明,李 红,孟凡勇,祝连庆
(1.北京信息科技大学 光电测试技术及仪器教育部重点实验室,北京 100192;2.北京信息科技大学 光纤传感与系统北京实验室,北京 100016)
1 引 言
随着科学技术和生产生活的不断发展,角度测量越来越广泛的应用于科研、工业生产等许多领域,技术水平和测量准确度也在不断提高[1],因此倾角传感器被广泛应用于道路检测[2],桥梁监测[3],建筑物健康监测[4],国防工业[5],航空航天[6],科学研究[7]等领域。与传统传感器相比,光纤倾角传感器有着重量轻、体积小、灵敏度高、抗电磁干扰等优点[8]。
光纤倾角传感器主要分为光纤光栅式和光纤干涉式倾角传感器。光纤光栅倾角传感器[9]主要是利用光纤布拉格光栅(FBG)制作的,当倾角发生变化时,通过改变FBG栅区的折射率从而引起反射光谱的波长漂移,通过对波长漂移的分析来测量倾角。H.Y.Au[10]等人在2011年提出一种二维倾角传感器,它是将四根刻写FBG的光纤分别粘贴在正方形金属框架的四个臂中心点上。圆柱体的重心与光纤的交点重合,因此在方框的中心。当传感器倾斜时,根据四个FBG反射光谱的波长漂移可以实现角度测量。该传感器倾角灵敏度0.0395 nm/°。基于FBG的倾角传感器灵敏度较低,且FBG的成本较高。光纤干涉式倾角传感器是基于光学干涉原理构造的,主要有迈克尔逊(Michelson)干涉式[11],马赫-曾德(Mach-Zehnder)干涉式[12],以及F-P干涉式[13]。2011年,Amaral[14]等人基于Michelson干涉结构设计出了一种光纤倾角传感器。倾角传感器由单模光纤和光纤拉锥组成,通过对测试结果解调分析得到其倾角响应特性。Cheng-Ling Lee[15]等人在2014年提出了一种基于 Mach-Zehnder干涉仪的光纤倾角传感器。它包括光纤锥体和铁球,并在铁球两端固定上锥体,当倾角变化时铁球拉伸光纤锥体,从而导致反射光谱变化,实现倾角测量。该传感器正方向的倾角灵敏度为0.125 nm/°。基于光纤干涉式倾角传感器一般结构较为复杂,灵敏度普遍较低。Yiyang Zhuang[16]等人在2018年提出一种基于F-P腔的光纤倾角仪,它是基于摆式结构,双线下固定一个长方体形状的质量块,侧面固定有光纤端面,当传感器发生倾斜时,F-P腔长就会发生改变,通过测量波长变化获得倾角值。
在之前的研究基础上[13,16],本文提出了一种基于F-P干涉的光纤倾角传感器。该传感器为“单模光纤-毛细管-单模光纤”结构,毛细管一端放入端面镀金膜的单模光纤,另一端放入预切割好的单模光纤,并将毛细管和单模光纤用环氧树脂胶固定在金属片上。该传感器利用空气腔长的改变引起波长漂移,从而实现倾角测量。在0°~10°测量范围内,倾角灵敏度为0.2031 nm/°;在45 ℃~49 ℃温度范围内,温度灵敏度为4.777 nm/℃。
2 实验原理
2.1 光纤F-P干涉原理
本文介绍的倾角传感器是基于光纤F-P干涉原理制作的。图1所示为光纤F-P干涉原理示意图,由图1可知,当输入光经过单模光纤L1传输到达端面时,部分光被反射回来;剩余光经过空气腔传输到单模光纤L2,部分光被端面反射回来。由于反射回来的两束光经过的路径不同,因此两束反射光之间存在光程差,相互叠加发生F-P干涉。

图1 光纤F-P干涉原理示意图Fig.1 Schematic diagram of fiber F-P interference principle
F-P干涉反射光强IR表达式如下:
(1)
式中,I0为入射光强;R1和R2分别为单模光纤L1和L2的反射率;φ为两个端面反射出的光的初始相位差,其中:
(2)
式中,n0为谐振腔的折射率;d为空气腔长;λ为波长。当相位差φ=2mπ(m为整数)时,干涉光强有最大值;当φ=(2m+1)π(m为整数)时,干涉光强有最小值。根据F-P干涉理论,干涉相位最强的中心波长λm可以表示为:
(3)
根据公式(3)可知,随着F-P干涉腔长度的变化,干涉相位的中心波长会发生漂移。
2.2 倾角传感原理
图2所示为倾角传感结构示意图。将单模光纤和毛细管用胶水固定在金属基底上,在金属基底尾端固定一质量块。毛细管内径略大于单模光纤直径,并约束两单模光纤在同一水平面发生相对位移。将该结构等效为悬臂梁结构。两个单模光纤端面反射光形成F-P干涉。当传感结构发生倾斜时,两个单模光纤间距发生变化。

图2 倾角传感结构示意图Fig.2 Schematic diagram of inclination sensing structure
对图2所示的悬臂梁结构进行受力分析如图3所示。

图3 悬臂梁结构受力分析示意图Fig.3 Force analysis of cantilever beam structure
对图3分析可知,当倾角为0°时,所受重力G等于沿杆方向的拉力,压力F为0 N,空气腔长为d;当倾角发生改变时,压力F为:
F=Gsinθ
(4)
其中,θ为倾斜角度。由于受到压力作用,金属片发生形变,空气腔长变为d+Δd。对悬臂梁结构进行仿真分析,仿真选用的金属片为铝合金材质,长为70 mm,宽为6 mm,厚度为2 mm,两固定圆孔直径为3.5 mm。单模光纤为玻璃材质,纤芯直径是125 μm。两单模光纤端面初始间距(即空气腔长)为400 μm。当对其尾端施加垂直端面向下的压力时,两端面间距会发生变化。图4展示了悬臂梁结构分别受到0.1 N、0.3 N、0.5 N、0.7 N压力时的静态结构分析图。对图4所示的仿真进行分析,结果如表1所示。

(a)0.1 N

(b)0.3 N

(c)0.5 N

(d)0.7 N图4 悬臂梁结构受到不同压力时的静态结构分析图Fig.4 Static structure analysis diagram of cantilever beam subjected to different pressures
由表1可知,当倾角变化时,悬臂梁尾端受到压力产生形变,因此传感器的空气腔长会发生改变,从而引起光谱仪中反射光谱发生变化,引起波长漂移。通过对波长漂移分析,可以实现倾角的测量。

表1 不同受力情况下仿真结果分析Tab.1 Simulation results analysis under different stress conditions
3 实验和分析
光纤倾角传感器主要由两根单模光纤和毛细管组成,图5所示为光纤F-P倾角传感器实物图。毛细管的内径为150 μm,预先去除掉涂覆层。两根单模光纤端面均用切割刀切平,且L2端面镀上一层金膜,目的是增大其反射率,增强反射光功率和消光比。金属片为铝合金材质,长为70 mm,宽为6 mm,厚度为2 mm,两固定圆孔直径为3.5 mm。实验用的胶水为环氧树脂胶。传感器的制作步骤为:首先,将毛细管点胶固定在金属片中间位置;然后,将L2穿入毛细管的一端,并用胶水固定;最后,在毛细管的另一端放入单模光纤L1,L1也固定在金属片上,L1的另一端与光谱仪相连,通过调整L1端面在毛细管中的位置改变腔长大小,从而改变光谱仪中的反射光谱,将L1用胶水固定。将制作好的传感器静置固化24 h。

图5 光纤F-P倾角传感器实物图Fig.5 Optical fiber F-P inclination sensor physical picture
图6是倾角传感实验系统图。采用掺铒光纤放大器产生的放大自发辐射(ASE)作为光源,波长范围在C+L波段,输出功率为50 mW。使用光学光谱分析仪(OSA)观测传感器反射光谱的波长漂移。光环形器(OC)用于连接光源、光谱仪和传感器。宽带光源发出的光通过光环形器1端口传输到倾角传感器,倾角传感器反射回来的光通过2端口返回,环形器3端口连接光学光谱分析仪进行观测。实验时设置光谱仪的波长测量范围为1530~1560 nm。倾角位移平台角度调节范围为-15°~+15°。实验在精密光学平台上进行,倾角传感器始终处于同一个水平位置上。
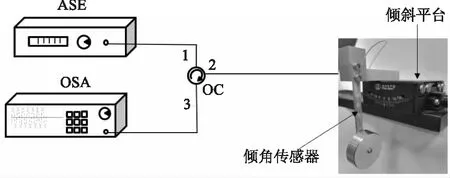
图6 光纤F-P倾角传感器角度实验系统Fig.6 Optical fiber F-P angle sensor angle experiment system
将传感结构固定在倾斜位移平台上,传感结构尾端固定一质量块,该质量块采用不锈钢材质,直径为3.00 cm,质量为54.37 g。传感结构通过光环形器与光源、光谱仪相连接。将倾角仪的刻度调到0°,待光谱稳定后保存光谱数据;转动倾角仪依次增加2°,重复上面操作,待光谱稳定后分别记录2°、4°、6°、8°、10°的反射光谱。
在室温下,改变倾角的大小,通过多次实验得到数据并对数据进行处理,得到结果如图7、图8所示。图7为倾角改变时的波长漂移图,由图7可知,当倾角变大时,反射光谱向长波长方向漂移,与理论分析一致;图8为倾角和反射波长的拟合曲线图,由图8可知,在室温下,倾角与反射波长呈线性相关。该传感器倾角灵敏度为0.2031 nm/°,线性度为0.99707。

图7 倾角改变时的波长漂移Fig.7 Wavelength drift when the dip angle changes

图8 角度和反射波长关系Fig.8 Relation between angle and reflected wavelength
为了验证温度对传感器的影响,对传感器进行了温度实验,采用如图9所示的装置。将传感器放置在温控箱(TCB)中,调节温控箱,分别测量45 ℃、46 ℃、47 ℃、48 ℃、49 ℃及其对应光谱并记录。

图9 光纤F-P倾角传感器温度实验系统Fig.9 Temperature experiment system of optical fiber F-P inclination sensor
在温度改变的情况下,对测量得到的数据进行处理,得到结果如图10、图11所示。图10为温度改变时的波长漂移图,由图10可知,当温度升高时,反射光谱向长波长方向漂移,与理论分析一致;图11为温度和反射波长拟合曲线图,由图11可知,在温度改变的情况下,温度与反射波长呈线性相关。且温度灵敏度为4.777 nm/℃,线性度为0.99934。

图10 温度改变时的波长漂移Fig.10 Wavelength drift with temperature change

图11 温度和反射波长关系Fig.11 Relation between temperature and reflected wavelength
综上所述,光纤F-P倾角传感器对角度和温度较为敏感,具有较高的灵敏度和较好的线性度,可以实现倾角测量。为了消除温度交叉敏感,用光纤光栅进行温度补偿。
4 结 论
本文提出了一种基于光纤F-P干涉的倾角传感器,该传感器结构简单稳定,价格低廉,具有较高的灵敏度和较好的重复性。传感器为“单模光纤-毛细管-单模光纤”结构,当外界角度或者温度发生变化时,空气腔长会发生改变,从而引起反射光谱发生变化,引起波长漂移,通过对波长漂移分析可以得到倾角结果从而实现倾角测量。在0°~10°的测量范围内,该传感器倾角灵敏度为0.2031 nm/°,线性度为0.99707;在45~49 ℃温度变化范围内,温度灵敏度为4.777 nm/℃,线性度为0.99934。综上所述,光纤F-P倾角传感器对倾角和温度较为敏感,具有良好的传感特性,对于倾角测量具有重要意义。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
云南化工(2020年11期)2021-01-14
电子制作(2018年23期)2018-12-26
设备管理与维修(2016年6期)2016-03-16
杂草学报(2015年2期)2016-01-04
中药与临床(2015年5期)2015-12-17
制造技术与机床(2015年10期)2015-04-09
中国舰船研究(2014年6期)2014-05-14
