
Lageos卫星激光测距前沿回波数据提取模型及应用
2021-12-07 05:29周钊冉张海峰程志恩张忠萍
激光与红外 2021年11期
周钊冉,秦 思,张海峰,3,程志恩,杨 昊,张忠萍,3
(1.中国科学院上海天文台,上海 200030;2.中国科学院大学,北京 100049;3.中国科学院空间目标与碎片重点实验室,江苏 南京 210008)
1 引 言
卫星激光测距(Satellite Laser Ranging,SLR)通过测定激光脉冲从地面站到带有反射器卫星的往返时间间隔,从而获得星地精确距离,其单次测距精度可达厘米级甚至亚厘米级,在卫星精密定轨和轨道校验、地球自转参数确定、全球地球参考框架建立和维护以及实现全球范围高精度激光时间传递等方面发挥了重要作用[1]。其中,卫星激光反射器是SLR的重要组成部分[2],为无源光学器件[3],主要功能是定向反射激光[4-6]。
带有激光反射器的卫星称为激光测距卫星,亦称激光卫星。Lageos(Laser Geodynamics Satellite)是最为重要的激光卫星,专用于地球动力学研究,包含Lageos-1和Lageos-2,两星为精确复制品[7]。根据Lageos两颗卫星观测资料得到的研究成果丰硕,科学贡献很大[1]。Lageos卫星轨道高度均约为5800 km,卫星表面覆盖了426个角锥棱镜[8-9](也称角反射器),卫星激光测距精度约为1 cm。
卫星激光测距过程中,地面站发射的激光到达卫星表面角反射器时,最靠前的第一块角反射器反射的光子和周围角反射器反射的光子存在时间差。因此,整个激光脉冲经卫星激光反射器反射后,其波形将发生变化,脉冲被展宽[10]。Lageos卫星由大量角锥棱镜组成,其脉冲展宽效应明显,采用常规方法处理Lageos卫星激光测距数据,生成的标准点在空间位置上与球体入射表面之间的距离存在不稳定现象。
提高Lageos卫星激光测距数据质量将对地球动力学研究具有重要意义。针对球形激光卫星,国际上提出了几种数据提取方法。Daniel Kucharski等通过提取Ajisai上单个角反射器面板的回波信号将单圈生成标准点的RMS值由2.97 mm降为0.06 mm[11],但该方法对回波形态要求较高,不适用于其他卫星。Georg Kirchner等提出前沿激光数据处理方法提升Ajisai激光标准点数据稳定性[12],即仅提取前端角锥返回的激光数据(以下简称“前沿数据”)生成激光标准点数据。该方法得到José Rodríguez等人的肯定,其生成标准点的RMS值较传统处理方法表现良好[13]。本文基于Lageos卫星激光角反射器的分布,推导了不同层级角反射器回波与反射深度之间的关系,建立了Lageos卫星前沿回波数据提取模型,并将其应用于国内卫星激光测距数据预处理,以提高上海站Lageos卫星激光测距数据质量。
2 Lageos卫星激光测距前沿回波数据提取模型
2.1 角锥棱镜的光学特性
为方便后文计算,本小节先对角锥棱镜的光学特性进行简要介绍。角锥棱镜是具有三个直角面相互垂直的四面体棱镜。当激光从四面体棱镜顶面(即三个直角面以外的第四面)入射,依次经过三个直角面的反射后从顶面出射,并与入射激光束平行,但方向相反。
对于未镀膜角锥棱镜,须考虑角锥临界角,即激光在任意方位上经过非镀膜角锥棱镜能实现全反射的最大激光入射角ic,其表达式如下[14]:
(1)
其中,n为角锥材料折射率,对于熔石英玻璃,n=1.461(@532 nm),根据公式1得熔石英玻璃角锥临界角为17°。现将激光入射角小于17°的角锥回波数据定义为“优质回波数据”。当激光入射角大于临界角时,其光学反射率急剧下降,而当激光入射角大于最大入射截止角(Lageos为0.75 rad[10])时,激光在任意方位上的光学反射率均趋于零。
另外,激光经过角锥棱镜内部的光程为[14]:
(2)
其中,L为角锥顶高;ng为角锥材料群折射率。对于熔石英玻璃,ng=1.4853(@532 nm)[15];φ为激光入射角。
2.2 Lageos卫星表面角锥棱镜分布情况
Lageos卫星为球形激光卫星,球体直径为60 cm,由两个半球组成,每个半球角锥棱镜的分布相同。Lageos卫星表面共覆盖了426个角锥棱镜,其中4个为锗晶体角锥,其余均为熔石英玻璃角锥,角锥棱镜顶面中心分布在半径R为298 mm的球面上。角锥棱镜采用内接圆切割,通光孔径约为38 mm,顶高27.8 mm,角锥直角反射面未镀高反射膜[8-9]。图1为Lageos卫星实物图,表1为Lageos卫星上半球角反射器的分布情况(另一半球角反射器分布情况一致)[8]。Lageos卫星设计之初,为了在有限表面装载更多角锥棱镜,环与环之间为错层安装[8],因此,Lageos卫星角锥排布较为紧密。为了简化计算,现将其近似为均匀布满角锥棱镜的理想模型。

图1 Lageos卫星Fig.1 Lageos satellite

表1 Lageos卫星半球角反射器分布参数Tab.1 Specifications for the rings of cube corners on each hemisphere of Lageos
2.3 Lageos卫星不同层级角锥回波与反射深度对应关系
球形激光卫星在绕地运动的同时也在自转,单个角锥的激光入射角持续变化。因球形激光卫星的形状特点,处于星地连线上面向地表最前端角锥反射的回波总是最先到达,其与测站距离最近,反映在图2上海SLR站Lageos卫星激光测距数据预处理残差图中时,其回波数据残差值最小且最靠下。同时,数据区间H与球形激光卫星不同反射点在激光方向的投影距离h相对应,称h为“反射深度”,如图3所示。
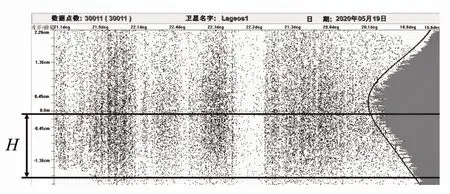
图2 Lageos卫星激光测距数据预处理残差图Fig.2 The laser data preprocessing of Lageos

图3 不同入射角对应有效反射点在激光方向的投影距离Fig.3 The projection distance of the effective reflection point in the laser direction corresponding to different incident angles
激光入射Lageos卫星时有两种特殊情况:直射角锥环(如图4(a))与直射相邻角锥环中心(如图4(b))。不同情况下,各层级角锥回波的反射深度不同。
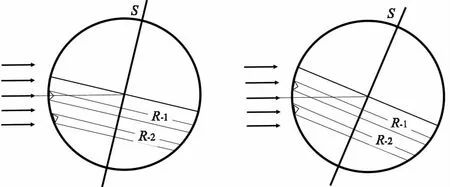
(a)直射角锥环 (b)直射相邻角锥环中心图4 激光入射Lageos卫星示意图Fig.4 Schematic diagram of laser incident on Lageos
现根据几何关系可以求出每种情况下的理论回波信号反射深度。
(1)情况一:激光直射相邻角锥环中心
如图5所示,A、B、C分别代表相邻三环的角锥中心,Q代表入射截止点,A′、B′、C′、Q′分别代表对应的等效反射点。|AA′|代表光线在棱镜内部的半光程,|A′B′| 代表A′、B′两点的光程差,其计算式如公式3所示;α1-2表示R1环、R2环中心。其他相似表达同理。经计算得表2所示结果:
|A′B′|=|PB|+|BB′|-|PA|-|AA′|
=R(cos∠AOP-cos∠BOP)
(3)
(2)情况二:激光直射角锥环
如图6所示,各符号代表意义均与情况一类似。经计算得表3所示结果。

图5 激光直射相邻角锥环中心局部示意图Fig.5 Partial schematic diagram of laser incident exactly on the middle of two cube rings

表2 不同直射点对应的回波信号反射深度(一)Tab.2 The reflection depth corresponding to different pointing position(the first case)

图6 激光直射角锥环局部示意图Fig.6 Partial schematic diagram of laser incident on the cube ring directly
由上述计算结果可得,情况一中|A′B′|、|A′C′|取最大值,|A′Q′|取最小值;情况二中|A′B′|、|A′C′|取最小值,|A′Q′|取最大值。经整理得如下结论:
1) Lageos卫星激光反射器总反射深度范围约为74.35~75.35 mm;
2) 相邻环角锥的反射深度范围约为2.89 mm~8.66 mm,为总反射深度的3.8 %~11.6 %;

表3 不同直射点对应的回波信号反射深度(二)Tab.3 The reflection depth corresponding to different pointing position(the second case)
3) 相间环角锥的反射深度范围约为13.65~25.42 mm,此时入射角均大于17°,回波率大幅下降,不属于优质回波数据,故可以作为数据截取边界条件。
3 前沿回波数据提取模型的数据处理流程
前沿数据提取的关键在于能否将整圈数据中所有的前沿数据整合到固定区间,进行统一提取。实际操作中,经过经典多项式拟合后的数据点,会筛选其中第一、二层角锥数据,并再次进行n阶拟合,最终得到清晰的数据分层,从而实现前沿数据的提取,Lageos卫星激光测距前沿回波数据提取流程如下:
1) 生成每个数据点关于历元t的预报残差(Prediction Residuals,以下简称PR);
2) 对整圈数据进行多项式拟合,得拟合残差(Fit Residuals,以下简称FR),并使用2.5σ滤波剔除噪声;
3) 根据2.3节结论2)及预处理经验将整圈FR数据等分为i段,标记每段前10 %数据为“前端数据”;
4) 对“前端数据”进行多项式拟合,将该拟合参数应用于整圈数据预处理[12],并再次使用2.5σ滤波剔除噪声;
5) 根据2.3节结论3)及各台站性能决定截取区间(上海站为0~20 mm),截取激光回波前沿数据后生成标准点[16]。
4 内符合实验对前沿回波数据提取模型所得标准点稳定性提升的验证



(4)

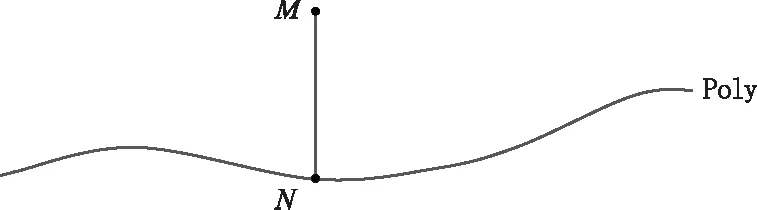
图7 观测点与拟合曲线示意图Fig.7 Schematic diagram of observation point to fitting curve
4.2 标准点稳定性的改善情况
为了判定标准点相对于卫星内参考点的稳定性,参考基准的选择十分重要。由于相邻环角锥的入射角均在17°以内,属于优质回波数据,其反射深度也在5 mm左右,故由它们的PR值生成的拟合函数曲线LE可以客观反映前端角锥回波数据分布,且较为稳定,是参考基线的最优选择。

现随机抽取上海SLR站2020年3月~11月Lageos-1、Lageos-2共38圈数据,采用常规方法及前沿回波数据提取模型两种方法分别对数据进行预处理,两种方法均得到约400个标准点数据,统计结果如图8。图8(a)为常规方法所得激光标准点数据相对于前沿参考线的距离散点图,图8(b)为前沿回波提取模型所得激光标准点数据相对于前沿参考线的距离散点图。

图8 不同方法所得激光标准点数据相对于前沿参考线的距离散点图Fig.8 Scatter diagram of two types normal points′ distance to LE
由图8a可知,从多圈次的测量数据对比可知,不同测圈因其回波率和回波数据区间不同,NPpolyDistance to LE在10 mm到25 mm之间跳动,波动巨大,所有测圈NPpolyDistance to LE均方差为3.37 mm,敛散程度较大,因此常规方法所求测圈间的标准点数据较不稳定。
使用前沿回波数据提取模型后,单一测圈NPLEDistance to LE的均值或均方差均没有太大波动,图8(b)中的NPLEDistance to LE均方差仅为0.50 mm。由此说明,NPLE有较好的稳定性,即经过前沿回波数据提取模型处理后的数据,其标准点稳定性得到了较大的提升。
5 外符合实验对前沿回波数据提取模型所得标准点精度提升的验证
利用国际联测数据进行快速精密定轨后,通过分析定轨残差可以对各站数据数量和质量进行评估。评估内容包括各台站标准点数量、观测精度及距离偏差(Range bias,RB)、时间偏差(Time bias,TB)等[17],本文以RB值作为主要评判标准。现分别用两种方法处理上海SLR站连续五天(2020.08.15~2020.08.19)共12圈次Lageos-2卫星激光测距观测数据,得到两组标准点数据,将其分别与国际其他台站标准点数据组合进行快速精密定轨处理[18],同时计算对应的RB值,结果如表4所示。表中第2列为常规方法预处理观测数据后每圈次反馈的RB值,第3列为前沿回波数据提取模型预处理观测数据后每圈次反馈的RB值。

表4 Lageos-2快速精密定轨RB值统计表Tab.4 RB value of Lageos-2 after fast and precise orbit determination
对比计算结果可知,由前沿回波数据提取模型预处理Lageos-2卫星激光回波数据后的RB值更小,较常规方法平均减少了7 mm。由此说明,前沿回波数据提取模型所得标准点质量更高,准确度更好,Lageos-2卫星激光测距预处理后的数据产品质量得到改善。
6 结 论
本文基于Lageos卫星角反射器的实际分布及结构特性,建立了Lageos卫星前沿回波数据提取模型,用于提升其标准点稳定性及准确性。从Lageos卫星角反射器分布参数出发,通过计算各层角锥的等效反射点位置,建立入射角与反射深度的关系,根据入射截止角判定反射深度边界,确定截取区间,留下优质回波数据,以提升Lageos卫星激光测距数据预处理生成标准点的数据质量。为了验证前沿回波数据提取模型有效性,采用常规方法与前沿回波数据提取模型两种方式分别处理Lageos卫星激光测距观测数据,并以前沿拟合函数曲线LE作为基准,统计两类标准点与LE的距离进而判断它们的稳定性。结果显示,常规方法所得标准点与LE的距离为16.66 ± 3.37 mm,前沿回波数据提取模型所得标准点与LE的距离为11.20 ± 0.50 mm,敛散程度明显降低。同时,通过快速精密定轨处理,前沿回波数据提取模型所得标准点反馈RB值的减小也体现了该模型的优越性。综上所述,前沿回波数据提取模型能有效提升Lageos卫星激光测距数据标准点的稳定性及准确性,为获得Lageos卫星及其他球形激光卫星的高质量激光测距数据提供了新思路。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
成都信息工程大学学报(2017年6期)2017-03-16
电源技术(2016年9期)2016-02-27
物理实验(2015年8期)2015-02-28
电子设计工程(2014年18期)2014-02-27
