
指夹式马铃薯精密排种器设计与试验
2021-12-07 05:36王业成高云鹏台文硕吕金庆杨德秋
农业机械学报 2021年11期
王业成 高云鹏 台文硕 王 宇 吕金庆 杨德秋
(1.东北农业大学工程学院, 哈尔滨 150030; 2.中国农业机械化科学研究院, 北京 100083)
0 引言
机械化播种是马铃薯机械化生产的重要环节,是实现马铃薯高产的必经之路[1-4]。排种器是播种机的核心部件,高效、可靠的排种器是确保马铃薯种植质量与效率的关键[5-9]。
目前我国北方一季作区马铃薯播种主要采用搭载舀勺式排种器的播种机进行作业。舀勺式排种器在携种过程中,种薯在舀勺内处于单面约束状态,易受外界振动扰动而脱离舀勺,造成漏播;清种过程中不同质量种薯受到相同的清种振动强度,影响了排种作业质量[10-13]。为此,学者对舀勺式马铃薯排种器进行了优化改进。吕金庆等[14]设计了一种舀勺式马铃薯播种机清种装置,降低了播种机重播指数;韩恒等[15]分析了影响带勺式马铃薯播种机工作性能的因素,为马铃薯播种机设计及其参数调整提供了参考;黄勇等[16]对带勺式马铃薯排种器工作参数进行了优化,提高了作业质量。
舀勺式马铃薯排种器要求舀勺几何参数与种薯大小相匹配,近年来国内外学者对马铃薯其它排种方式也进行了研究[17-22],刘文政等[23]基于受迫振动原理设计了一种振动排序播种装置,为微型薯等大颗粒种子相关播种装置的设计提供了参考;侯加林等[24]设计了一种气力托勺式马铃薯精量排种器,降低了排种器高速作业时的功耗;王凤花等[25]针对丘陵山地小地块播种需求,设计了一种单行气吸式微型薯精密播种机,降低了播种机伤种率。
本文设计一种指夹式马铃薯精密排种器,通过控制夹板的开合与摆动进行排种作业,在携种过程中实现夹板对种薯的可靠夹持,在清种过程中通过夹板摆动来改变夹板对种薯的约束状态,实现种薯的单粒夹持。
1 排种器结构与工作原理
1.1 主要结构
如图1所示,指夹式马铃薯精密排种器主要由壳体、主轴、排种盘、夹持机构、护种板、限位环、滑道、清种滚轮等组成。排种盘通过主轴安装在壳体上;夹持机构通过板簧安装在排种盘上;滑道、限位环、清种滚轮、护种板固装在壳体上。
如图1d所示,夹持机构由夹板、拐臂、滚轮、套筒、限位板、扭簧、清种开关等组成。夹板固装在拐臂端部,拐臂可转动地安装在套筒内,套筒通过板簧安装在排种盘上;滚轮可转动地安装在套筒端部,与滑道配合构成一套凸轮机构,用于控制夹板的移动;清种开关固装在拐臂尾部,与清种滚轮配合构成一套反凸轮机构,用于控制拐臂在套筒内的转动,从而使夹板相对排种盘具有平移、转动2个自由度,夹板可分别进行开合、摆动2种运动,实现对种薯的夹持和对多余种薯的清除功能。
1.2 工作原理
如图2所示,排种器工作过程分为充种、夹种、清种、携种、投种5个工作过程。
如图3a所示,充种过程中夹持机构上的滚轮在滑道作用下带动夹持机构运动,使夹板处于开启状态,马铃薯种薯通过壳体上的进种口进入壳体内,在自身重力及种薯间相互挤压力作用下,落入到夹板、排种盘之间的夹持空间内,完成充种过程;夹持空间内的种薯在夹板、排种盘的带动下随排种盘转动,如图3b所示,当夹持机构上的滚轮与滑道脱离,夹板在板簧弹力作用下闭合,将夹持空间内的种薯夹持,完成夹种过程;如图3c所示,清种过程中夹持机构上的清种开关依次与壳体上的3个清种滚轮接触、分离,当清种开关与清种滚轮接触时,清种开关带动拐臂与夹板绕套筒中心线转动,当清种开关与清种滚轮分离时,夹板等在扭簧弹力作用下绕套筒中心线反向转动,使夹板恢复到初始位置,从而实现夹板的摆动。
若夹板与排种盘之间夹持1个种薯,清种时夹板的摆动仅改变夹板对种薯夹持力方向,种薯所受夹持力大小受到板簧弹力控制基本保持不变,保证了单个种薯的可靠夹持;若夹板与排种盘之间夹持2个种薯,夹板的摆动将使其中1个种薯与夹板之间的距离发生改变,如图3c所示,右侧种薯将失去夹板与排种盘的约束限制,夹持力变为0,多余种薯在自身重力作用下将脱离夹持空间,完成清种过程;如图3a所示,投种过程中滚轮与滑道接触,带动夹持机构运动,使夹板开启,夹持空间内的种薯丧失夹持力,在自身重力作用下通过壳体上的投种口落入种沟内,完成投种过程。
2 关键部件设计
2.1 排种盘极限线速度
种薯从进种口进入到壳体内,在自身重力及种薯间相互挤压力作用下进入夹板与排种盘之间的夹持空间,夹板、排种盘以线速度v运动,当夹板边缘的种薯下落自身尺寸的2/3时,认为充填是可靠的[21-22,26],如图4所示,可知排种盘极限线速度
(1)
(2)
式中vg——排种盘极限线速度,m/s
D——相邻两夹板间的距离,m
vm——播种机作业速度,m/s
S——播种株距,m
Z——夹持机构个数,个
d——种薯直径,m
R——排种盘半径,m
由式(1)可知,当种薯直径d一定时,通过增大相邻两夹板间的距离D可以提高排种盘极限线速度。播种株距按200 mm计算,综合考虑排种器整体结构尺寸不宜过大及排种器内部空间限制,选取排种盘直径为500 mm、夹持机构个数为10个,由式(1)、(2)可知,此时排种盘极限线速度为1.6 m/s,播种机极限作业速度为7.4 km/h。
2.2 清种位置分析
清种时,夹持机构在清种滚轮作用下使夹板摆动,当夹板夹持2个种薯时,夹板摆动使其中1个种薯与夹板间距离发生变化,导致其丧失夹持力,在自身重力作用下以抛物线轨迹脱离夹板与排种盘之间的夹持空间,多余种薯在下落过程中应保证不会落入护种板与壳体构成的携种通道内,避免造成重播。如图5所示,以排种盘中心为原点,建立直角坐标系,种薯下落运动方程为
(3)
式中x0、y0——种薯脱离夹持空间时横、纵坐标,m
t——种薯脱离夹持空间后运动时间,s
v0——种薯脱离夹持空间速度(排种盘线速度),m/s
vx、vy——种薯下落过程中水平、竖直方向分速度,m/s
θ——种薯脱离位置与水平方向夹角,(°)
如图5所示,当种薯脱离夹持空间后的下落轨迹低于护种板上端顶点A(x1,y1)时,可保证种薯下落过程中不会落入护种板与壳体构成的携种通道内而造成重播,即当x=x1时,要求护种板上端顶点A与种薯的竖直距离(以下简称距离)h=y1-y>0。
当护种板上端顶点A坐标取(-120 mm,120 mm)时,由式(3)计算获得距离h变化曲线,如图6a所示(播种机作业速度为4、6、8、10 km/h时,排种盘线速度为0.87、1.31、1.74、2.18 m/s)。距离h随种薯脱离位置与水平方向夹角θ(以下简称夹角)的增大而减小,随排种盘线速度v0的增大而减小。在点A位置确定时,较小的夹角θ可以使排种器在较高的排种盘线速度下满足距离h>0,即避免多余种薯落入携种通道;较大的夹角θ可以增大清种过程工作区域,提高清种作业质量。
当多余种薯掉落过程中处于距离h=0的临界状态时,由式(3)计算获得夹角θ随顶点A纵坐标y1的变化曲线,如图6b所示。夹角θ随护种板上端顶点A纵坐标y1的增加先缓慢增大后减小。在相同排种盘线速度下,在顶点A纵坐标y1为0~120 mm时,对夹角θ影响较小。
考虑壳体内种薯高度,取点A坐标(-130 mm,110 mm)、排种盘线速度为1.31 m/s(播种机作业速度6 km/h)、夹角θ区间为0°<θ<50°时,可以满足距离h=y1-y>0,即脱离夹持空间的种薯下落过程中不会落入携种通道内。同时在清种区域及携种通道入口处安装毛刷,提高未夹持的多余种薯分离速度,防止多余种薯进入携种通道,以降低重播指数。
2.3 夹持机构设计
夹持机构是排种器的核心工作部件,其结构参数直接影响排种器作业质量。
2.3.1夹板
夹板与种薯直接接触,其结构参数决定夹持空间的大小,应在满足对种薯可靠夹持的条件下,减少多个种薯的夹持。
如图7a所示,夹板的长、宽分别为l1、b1。增大夹板长度l1,可以增大夹持空间长度,便于种薯夹持,提高充种性能。如图7b所示,当夹持空间内的种薯左侧与板状拐臂相接触、下侧与壳体相接触时,种薯在沿夹板平面长、宽、对角线方向可能重叠充填。当沿着夹板长度l1方向夹持2个种薯时,清种过程中夹板绕套筒中心线摆动,导致左侧种薯与夹板之间的距离发生变化,使其失去夹板与排种盘约束限制而被清除。如图7c所示,夹板的对角线方向具有最大几何尺寸,当种薯沿夹板对角线方向左上右下重叠充填时,夹板摆动可以将左侧种薯2清除,同时适当增大夹板左上、右下圆角,减小该方向的几何尺寸,可降低重叠充填的概率;如图7d所示,当种薯沿夹板对角线方向左下右上重叠充填时,右侧种薯1将限制左侧种薯2脱离夹持空间,可增大夹板右上方圆角,减小该方向几何尺寸,从而减少重叠充填。结合种薯几何尺寸,取夹板宽度b1为35 mm、左上圆角R1为15 mm、右上圆角R2为20 mm,夹板长度参考现有文献选择其长度范围为大于马铃薯种薯最大几何尺寸,小于2倍的马铃薯种薯最小几何尺寸[27],具体尺寸由试验确定。
为避免充种过程中夹板与种薯挤压及碰撞造成伤种,对夹板所有棱边采取倒圆角处理,并在夹板表面包裹1 mm厚的聚烯烃材料。
2.3.2板簧
夹持机构通过板簧安装在排种盘上,种薯所受到的夹持力由板簧弹性形变所提供,夹持力大小确定原则为在种薯可靠夹持的条件下避免损伤。
夹持机构在夹种、携种阶段仅受到种薯对夹板的作用力F,夹持机构受力简图如图8所示。
位移z、夹板转角θ1及其比值为
(4)
(5)
(6)
其中
k=l2/b
式中l2——板簧长度,m
b——夹持机构长度,m
E——板簧弹性模量,Pa
I——板簧惯性矩,m4
由式(4)可知,当材料、结构参数不变时,位移z与种薯对夹板的作用力F成正比,尺寸较大的种薯将受到较大的夹持力。当位移z一定时,减小板簧惯性矩I、增加夹持机构长度b,可以降低种薯对夹板的作用力F,即降低夹持机构的刚度。选取较小的夹持机构刚度可以减小初始夹持力与最大夹持力的差值,避免夹持力大幅度变化,影响种薯夹持可靠性。
清种时,3个清种滚轮依次与夹持机构的清种开关接触与分离,清种滚轮对清种开关作用脉动力F1使夹板摆动清种。清种过程中,应减小清种滚轮对种薯夹持力的扰动,保证种薯可靠夹持。
如图8所示,夹持机构在清种阶段受到种薯对夹板的作用力F、清种滚轮对清种开关的作用力F1。按照叠加法仅考虑力F1引起夹板的位移z2,通过位移z2变化来分析清种阶段清种滚轮对种薯夹持力F的影响。清种滚轮仅在力F1作用时夹板位移
(7)
式中a——清种开关到套筒端部距离,m
由式(7)可知,减小清种滚轮对清种开关的作用力F1、增大板簧刚度EI,可以减小位移z2。当清种滚轮对清种开关的作用力F1一定时,选取适当的清种开关到套筒端部距离a,可以使位移z2为0,当力F1作用于该位置时可以减小清种过程中清种滚轮对夹板位移的影响,从而减弱清种滚轮对种薯夹持力的扰动。
夹板与排种盘间的距离受限位环、滑道、板簧的控制,其中限位环限制夹板与排种盘之间最小距离,参考种薯几何尺寸,取夹板与排种盘之间最小距离为20 mm,此时板簧提供夹持力最小,取为2 N,从而确定夹板位移z的初始值(即板簧的预变形);取充种阶段夹板与排种盘之间距离为60 mm,从而实现对最小尺寸为20~60 mm种薯的充填与夹持;为了使种薯可靠地脱离夹持空间完成投种,投种阶段夹板与排种盘之间距离大于充种阶段,取投种阶段夹板与排种盘之间距离为70 mm。
受排种器结构尺寸限制,取夹持机构长度b=200 mm,板簧为65号弹簧钢,其厚度为0.5 mm、宽度为32 mm、长度l2=80 mm。取夹板位移z为49~89 mm,此时板簧提供夹持力F为2.0~3.6 N。
2.4 滑道设计
夹持机构上的滚轮与滑道构成力封闭凸轮机构,控制夹持机构的开启、闭合,实现充种、夹种、投种过程,是排种器的关键控制部件。
充种阶段,夹持机构在滑道的控制下处于开启状态,夹板与排种盘构成恒定大小的充种空间;夹种阶段滚轮与滑道分离,夹板在板簧弹性力作用下闭合(回程),夹持种薯;回程过程中夹板应逐渐闭合,避免种薯受到较大冲击,减小碰撞、振动对夹种性能的影响;投种阶段夹持机构在滑道控制下开启(推程),种薯失去夹持力,在自身重力作用下从投种口落出,完成投种过程。为了保证种薯可靠脱离夹持空间,投种阶段夹板的开启位移应大于充种阶段;为了使不同几何尺寸种薯在相同位置投种,推程过程夹板开启需要有足够的打开速度,通过缩短夹板开启时间,减小投种过程对种薯下落轨迹的干扰。
推程采用一次多项式运动规律控制夹板高速开启,回程采用正弦加速度规律控制夹板低速闭合,其方程为
(8)
式中S1——投种过程推程位移,m
S2——夹种过程回程位移,m
δ——滚轮绕主轴的旋转相位角,(°)
3 试验
3.1 试验材料与设备
试验材料选用东北地区广泛种植的东农311马铃薯种薯,对种薯采取切芽块处理,如图9所示,具体切芽块操作为:50~60 g种薯不切块;60~100 g种薯切2块;100~150 g种薯切3块[10],种薯几何参数如表1所示。

表1 马铃薯种薯参数Tab.1 Parameters of potato seed
其中种薯最大尺寸为种薯所在空间两平行面最大距离,最小尺寸为种薯所在空间两平行面最小距离,尺寸比为种薯最大尺寸与最小尺寸的比值[28]。
试验在东北农业大学排种器实验室实施。如图10所示,试验装置主要由指夹式马铃薯精密排种器、JPS-12型排种器性能试验台组成。
3.2 试验方法
根据农艺要求选取马铃薯种薯播种理论株距为200 mm。参考GB/T 6242—2006《种植机械 马铃薯种植机 试验方法》和GB/T 6973—2005《单粒(精密)播种机试验方法》,选取种床带速度、清种位移、夹板长度为试验因素,以合格指数、重播指数、漏播指数为评价指标,其中清种位移为夹持机构受到清种滚轮作用时,夹板摆动过程中其前、后端到排种盘距离差的最大值,试验过程中,清种位移通过改变清种滚轮安装位置进行调节。采用三因素五水平二次正交旋转中心组合试验方法,试验因素编码如表2所示。在试验过程中,每组试验重复3次,每次连续记录自排种器稳定工作时起种床带上连续排出的150个种薯,取3次试验的平均值作为试验结果。
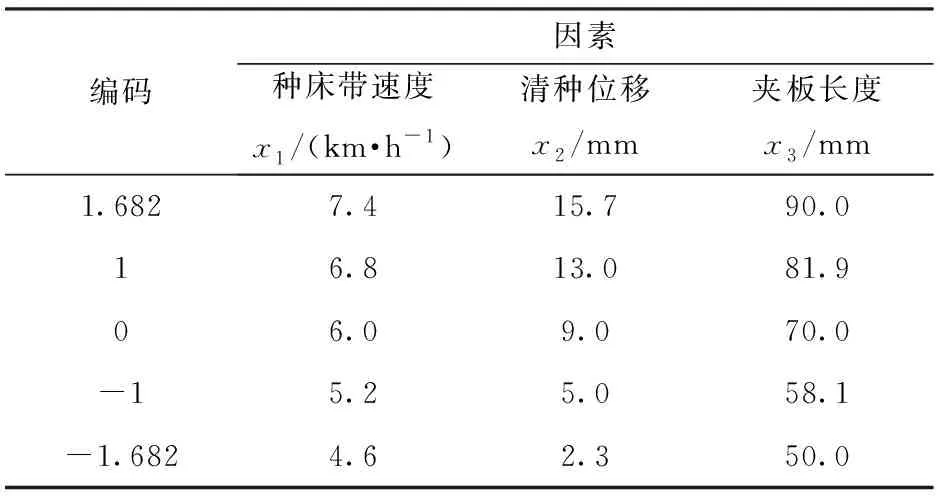
表2 试验因素编码Tab.2 Coding of experimental factors
3.3 试验结果与分析
3.3.1试验结果
试验结果如表3所示,X1、X2、X3为因素编码值。

表3 试验设计与结果Tab.3 Experiment design and results
应用Design-Expert软件对回归模型进行方差分析[29],如表4所示,模型P值均小于0.01,表明模型极显著,失拟项P值均大于0.05,表明失拟项不显著,其中种床带速度对合格指数具有极显著影响,清种位移、夹板长度对合格指数具有显著影响,影响由大到小依次为种床带速度、夹板长度、清种位移;各因素对重播指数均具有极显著影响,影响由大到小依次为种床带速度、清种位移、夹板长度;各因素对漏播指数均具有极显著影响,影响由大到小依次为夹板长度、清种位移、种床带速度。略去不显著项,分别得到各指标的回归模型
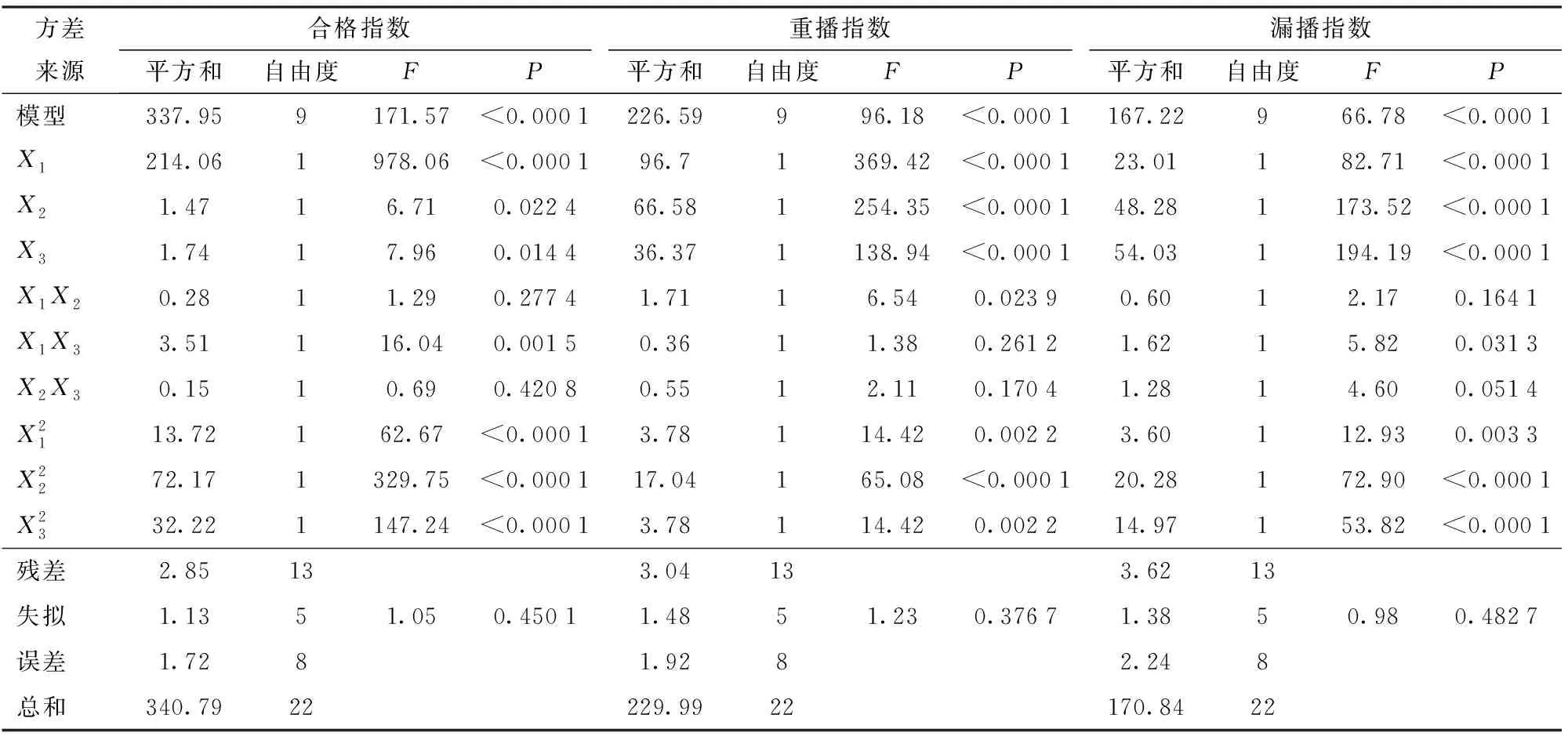
表4 方差分析Tab.4 Results of variance analysis

(9)

(10)

(11)
3.3.2各因素对各指标的影响分析
如图11a、12a、13a所示,当清种位移取9.0 mm时,合格指数随种床带速度的增加而降低,重播指数随种床带速度的增加而升高,漏播指数随种床带速度的增加而升高,主要是因为当种床带速度升高时,清种过程中失去夹持力的种薯掉出夹持空间的可用时间减少,造成排种器清种性能下降,重播指数升高,同时充种过程中种薯进入夹持空间的可用时间减少,造成排种器充种性能下降,漏播指数升高。当种床带速度取6 km/h时,合格指数随清种位移的增加先升高后降低,重播指数随清种位移的增加而降低,漏播指数随清种位移的增加而升高,主要是由于当清种位移较小时,夹板摆动幅度无法使多余种薯脱离夹持空间,重播指数较高,随着清种位移的增加,排种器清种性能不断增强,重播指数降低造成合格指数升高,随着清种位移进一步增大,部分夹持不牢靠的种薯,在清种过程被错误清除,导致漏播指数升高,合格指数下降。
如图11b、12b、13b所示,当种床带速度取6 km/h时,合格指数随夹板长度的增加先升高后降低,重播指数随夹板长度的增加而升高,漏播指数随夹板长度的增加而降低;当夹板长度取70 mm时,合格指数随种床带速度的上升而降低,重播指数随种床带速度的升高而升高,漏播指数随种床带速度的升高而升高。
如图11c、12c、13c所示,当清种位移取9 mm时,合格指数随夹板长度的增加先升高后降低,重播指数随夹板长度的增加而升高,漏播指数随夹板长度的增加而降低,主要是由于当夹板较短时,几何尺寸较大的种薯难以被稳定夹持,造成漏播指数升高、合格指数降低,随着夹板长度的增大,夹板与排种盘构成的夹持空间长度增大,排种器充种性能增强,使漏播指数降低合格指数升高。随着夹板长度的进一步增大,在充种过程中夹持2个种薯的概率增加,在相同的清种效率下,重播指数升高、合格指数降低;在夹板长度取70 mm时,合格指数随清种位移的增加先升高后降低,重播指数随清种位移的增加而降低,漏播指数随清种位移的增加而升高。
3.4 参数优化与验证试验
在满足排种作业速度要求的前提下获得较大的合格指数,较小的重播指数和漏播指数,据此选取目标函数和约束条件为
(12)
当种床带速度6.0 km/h、清种位移9.5 mm、夹板长度72 mm时,排种器合格指数为90.3%、重播指数为6.2%、漏播指数为3.5%。
为验证优化结果正确性,在上述参数组合试验条件下,进行5次验证试验,得出合格指数平均值为90.3%、重播指数平均值为6.1%、漏播指数平均值为3.6%,验证试验结果表明,结果可信。
4 结论
(1)设计了一种指夹式马铃薯精密排种器,通过控制夹板的开合与摆动进行排种作业,在携种过程中实现对种薯的可靠夹持,在清种过程中通过改变夹板对种薯的约束条件实现单粒夹持。
(2)对排种器主要工作过程进行了分析,获得了排种盘极限线速度和清种位置的变化规律。参考种薯几何尺寸、质量等参数,通过对夹持机构受力分析,确定了夹板、板簧等关键部件的参数。
(3)采用三因素五水平二次正交旋转中心组合试验方法进行了参数优化试验,建立了合格指数、重播指数、漏播指数的回归模型,分析了各指标的变化规律。试验表明,当种床带速度为6.0 km/h、清种位移为9.5 mm、夹板长度为72 mm时,排种器的合格指数为90.3%、重播指数为6.1%、漏播指数为3.6%,满足播种技术要求。
猜你喜欢
医学理论与实践(2022年19期)2022-11-24
中国农业文摘-农业工程(2022年5期)2022-11-23
医学食疗与健康(2022年2期)2022-04-23
中国典型病例大全(2022年7期)2022-04-22
新疆农机化(2022年1期)2022-03-02
汽车文摘(2020年2期)2020-01-16
汽车实用技术(2017年24期)2018-01-24
汽车实用技术(2017年22期)2017-12-11
股市动态分析(2016年27期)2016-07-26
汽车实用技术(2015年8期)2015-12-26
