
小白菜复式播种机犁旋辊压驳岸型种床起垄装置研究
2021-12-07 05:36张青松廖宜涛魏国粱廖庆喜
农业机械学报 2021年11期
刘 海 张青松 廖宜涛 魏国粱 杜 铮 廖庆喜
(1.华中农业大学工学院, 武汉 430070; 2.武汉市农业科学院, 武汉 430065;3.农业农村部长江中下游农业装备重点实验室, 武汉 430070)
0 引言
小白菜是长江中下游地区种植面积最大的叶类蔬菜[1],该区域种植田块土壤黏重板结且雨量充沛,遇连续阴雨天易遭受淹水胁迫,不利于小白菜种子出苗[2-4],因此小白菜直播作业时要求构建适宜小白菜种子生长的种床[5-6]。构建合理种床结构能增加土壤通透性,促进小白菜根系生长发育,减少小白菜渍害,提高小白菜种子成苗率,研制构建长江中下游地区小白菜合理种床的农机配套装置非常必要。
传统的小白菜直播前种床整理以人工为主,生产成本高、劳动强度大,制约着小白菜生产规模和经济效益。近年来,随着小白菜生产机械化水平的提高,人工开沟起垄作业逐渐被机械化作业所取代[7-9],同步完成开沟起垄和直播作业的复式播种将成为趋势。小白菜复式播种机种床构建的关键部件为起垄装置,其垄体成型效果直接影响播种机的作业质量[10]。
目前国内外众多研究机构和学者对农田开沟起垄技术进行了深入研究[11-24]。现有种床成型装置主要适用于播种油菜、玉米、大豆等作物,且以被动挤压成型方式为主,其作业时土壤流动特性与长江中下游地区有一定差异[25-26],而适应于辊压成型种床起垄装置的研究较少,因此有必要专门针对小白菜复式播种机犁旋辊压驳岸型种床起垄技术进行深入研究。
小白菜直播对种床要求较高,若种床成型后土壤坚实度不高,会导致种床厢面分布土块松散,土块间的缝隙大、土壤水分蒸发过快,土壤墒情下降,严重影响小白菜成苗率,种床合理构建技术是小白菜复式播种机的关键技术之一。本文针对长江中下游地区小白菜种植模式的种床构建技术要求,结合传统种床整理工艺,以驳岸型垄体截面和垄沟截面组合挤压同步成型设计方式,设计犁旋辊压驳岸型种床成型装置,对样机开展田间试验以验证其性能,以期得到适宜南方黏重土壤条件下小白菜垄播的稳定垄体和垄沟。
1 总体结构与工作原理
1.1 总体结构
小白菜复式播种机犁旋辊压驳岸型起垄装置主要包括前犁、主机架、传动部件、旋耕刀、破土整形部件、齿轮箱、包络整形弧板和起垄辊,其结构如图1所示。
1.2 工作原理
小白菜复式播种机犁旋辊压驳岸型起垄装置触土部件主要包含前犁、主机架、旋耕刀、包络整形弧板以及起垄辊,如图2所示。整机通过三点悬挂装置和拖拉机相连接,采用中间传动方式。作业时,拖拉机液压系统分配器手柄处于浮动位置,主机架两侧前犁破土、开沟、翻垡,初步形成垄沟;拖拉机旋转动力输出装置通过齿轮箱传递动力驱动左右刀辊和起垄辊旋转,由刀辊上的旋耕刀完成碎土及定向抛土作业;包络整形弧板随机组前进挤压土壤、平整沟底,同时起垄辊同步压实土壤平整垄壁及垄面,土壤在起垄装置作用下形成垄体。
1.3 主要技术参数
小白菜复式播种机犁旋辊压驳岸型起垄装置一次作业行程后形成驳岸型双垄单沟,其主要技术参数如表1所示。
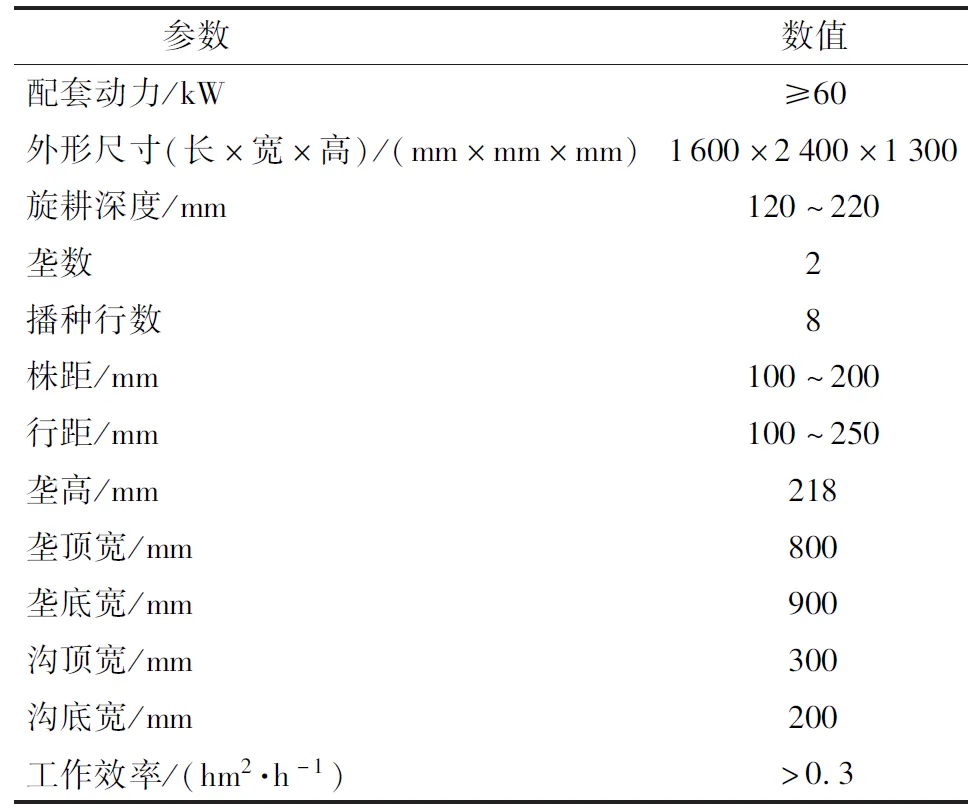
表1 旋耕起垄装置技术参数Tab.1 Technical parameters of ridging device
2 辊压起垄装置设计
驳岸能保证坡体不受冲刷,通常用于园林工程中保持土壤形状[27]。为确保播种机作业后垄体不因土壤坍塌而破坏种床,本文基于驳岸结构设计小白菜复式播种机犁旋辊压驳岸型种床起垄装置,作业后的小白菜种床垄体任意一垂直于水平面及前进方向的截面呈双倒驳岸断面,垄体断面如图3所示。图中L为整机作业幅宽,2 200 mm;L1为垄底宽,900 mm;L2为垄顶宽,800 mm;l1为沟顶宽,300 mm;l2为沟底宽,200 mm;S2为垄间距,1 100 mm。
小白菜复式播种机犁旋辊压驳岸型起垄装置的结构决定了播种机的开沟起垄性能。根据整机作业幅宽及小白菜播种工艺方案,以现有播种行数为基准,小白菜株行距计算式为
(1)
式中e——边距,mm
s——小白菜机播行距,mm
根据小白菜种植农艺要求[28-29],小白菜的株行距范围为100~150 mm。由开沟器结构参数,确定边距e的取值范围为25~250 mm,代入式(1)计算小白菜机播行距s取值范围为100~250 mm。行距可根据驳岸型种床起垄装置尾部的开沟器横向位置调节,株距可根据排种器转速调节装置调节,株距可调范围为100~200 mm,满足小白菜精量种植农艺要求。
2.1 起垄取土深度参数分析
小白菜复式播种机犁旋辊压驳岸型起垄装置起垄前需完成破土、开沟、导土、抛土工艺,主要作用是使碎土集中于起垄辊中部,以满足主动辊压起垄种床成型作业,其工作参数直接影响起垄效果,如图4所示。
以点O为旋耕刀回转中心,x正向为机组前进方向,旋耕刀正转,整机作业时旋耕刀的运动轨迹为余摆线。以点Q为旋耕刀入土点,从最初入土到导土的过程中,为满足旋耕机正常工作条件,计算旋耕刀顶点运动轨迹方程为
(2)
式中R1——旋耕刀回转半径
vm——机组前进速度,km/h
ω1——旋耕刀辊回转角速度,rad/s
n——旋耕刀轴转速,r/min
H1——旋耕取土深度,mm
t——时间,s
为满足起垄辊所需抛土量,旋耕刀端点的水平分速度的必要条件为vx<0,根据式(2),可计算旋耕刀端点的绝对速度v0和水平分速度vx为
(3)
联立式(2)和式(3),得
(4)
作业时,机组前进速度vm为2.0~5.0 km/h,旋耕刀轴转速n为160~340 r/min,对应的旋耕刀辊回转角速度为16.75~35.59 rad/s,为达到起垄条件有H1>0 mm。根据旋耕刀结构参数及其空间位置,取R1=270 mm,代入式(4)可得H1<193.87 mm,根据整机结构取H1=182 mm。
2.2 起垄辊设计
播种机作业过程中主要通过起垄辊圆筒和起垄辊圆盘辊压土壤,使土壤被压实而形成垄体,实现动态起垄。刚性起垄辊同时以转动角速度ω2做回转运动、以速度vm做直线运动与土壤相互作用时,被压实土壤颗粒在挤压下由静态转为动态。土壤颗粒在刚性起垄辊挤压的作用下其颗粒之间的空隙及相对位置产生变化,以相互填充的形式对垄壁、垄顶同时推挤夯实,降低垄体接触面的粗糙度,有效预防土壤颗粒回流导致垄体坍塌。起垄辊结构直接影响垄体的几何轮廓,根据驳岸轮廓设计起垄辊结构,如图5所示。
根据弹性力学和土力学理论,土壤受外力挤压产生的形变主要由垂直力引起。结合起垄辊结构的对称性确定起垄辊的结构参数和工作参数,分析土壤运动规律时忽略土壤颗粒之间的相互作用力,建立如图6所示的倒驳岸型垄体截面图,开沟起垄作业中,单位截面积内的土壤总量前后平衡。图中虚线部分表示垄体成型前对应的取土截面,A1为取土截面面积,m2;A2为垄体Ⅰ截面面积,m2;A3为垄体Ⅱ截面面积,m2。
因对称关系设垄体Ⅰ截面面积A2与垄体Ⅱ截面面积A3相等。在播种机实际作业过程中,考虑到土壤坚实度系数得垄体参数方程为
(5)
式中k——土壤坚实度系数[30],取0.9
θ——起垄坡度,(°)
h——垄高,mm
根据小白菜垄播种植模式,将垄顶宽、垄底宽、沟顶宽等参数代入式(5),求出θ、h、A1、A2和A3分别为76.73°、212 mm、0.4 m2、0.18 m2和0.18 m2。
2.3 起垄辊受力分析
小白菜复式播种机犁旋辊压驳岸型起垄装置起垄辊为主动驱动,土壤的相互作用为辊压方式,其受力过程如图7所示。
当刚性驱动轮与土壤接触时,起垄圆筒同时受负载G、水平力F和驱动扭矩Mq作用,支承面上存在切向反力和法向反力作用。由此衍生了行走阻力Rx、土壤推力Pq及支承反力Ry,为使起垄辊稳定运动,平衡方程为
(6)
式中ra——垂直动力半径,mm
rd——水平动力半径,mm
Mm——起垄辊内摩擦阻力力矩,N·m
rq——起垄辊圆筒半径,mm
考虑到起垄时的土壤坚实度系数[31],令rd=rq,则由式(6)可得
(7)
由式(7)可知,土壤推力Pq不等于切线牵引力。因起垄辊为主动驱动型,其支承面下端的绝对速度不为零,且方向朝后,因起垄辊随机组前进,起垄辊转动所前进的距离比计算距离小。根据文献[32]中对刚性接触面与土壤相互作用力的分析,最大法向反力的位置有随起垄辊圆筒滑转的增大而向后移动的倾向,切向反力则始终指向前方,这与上述分析结果基本一致。
2.4 包络整形弧板参数分析
包络整形弧板结构曲线如图8所示,其沿机组前进方向触土部分主要为AB段和BC段,支撑部分为CD段。工作时,整形弧板与起垄辊随机组前进,整形弧板通过滑压土壤形成规则沟底轮廓,ABC段包络圆弧与起垄辊回转中心同心,AB段根据整形弧板厚度与起垄辊参数确定,BC段根据整形弧板与起垄辊的间隙确定,间隙太小导致土壤堵塞,影响种床平整度;间隙过大则导致整机结构尺寸过大,重心后移。
包络整形弧板各参数之间的结构关系为
(8)
式中R2——包络整形弧板触土面半径,mm
rp——起垄辊圆盘半径,mm
W——起垄辊回转中心至方管水平距离,mm
H2——起垄深度,mm
H3——起垄辊回转中心至方管顶端高度,mm
H4——包络整形弧板BC段垂直高度,mm
H5——支架方管宽度,mm
δ1——包络整形弧板厚度,mm
δ2——包络整形弧板与起垄辊的间隙,mm
θ1——点D和点C到起垄辊回转中心的夹角,(°)
θ2——包络整形弧板BC段圆心角,(°)
为确保垄沟底部平整,令H4=rp,包络整形弧板厚度取δ1=12 mm,根据整机结构得知W=230 mm,H3=400 mm,H5=80 mm,rp=280 mm,代入式(8)得R2=310 mm,H4=280 mm,δ2=18 mm,θ1=46°,θ2=70°,rq=68 mm。
2.5 起垄装置参数匹配
犁旋辊压驳岸型种床成型装置作业后,可实现种床成型和厢面平整,为满足小白菜垄播厢面平整的要求,犁旋辊压驳岸型种床成型装置起垄深度参数需要合理匹配,结合图2可得
d=R1+H2-H1-δ1-rp
(9)
式中d——起垄辊转轴与旋耕刀轴间的高度差,mm
根据起垄装置起垄条件有H2>H1,代入式(9),得
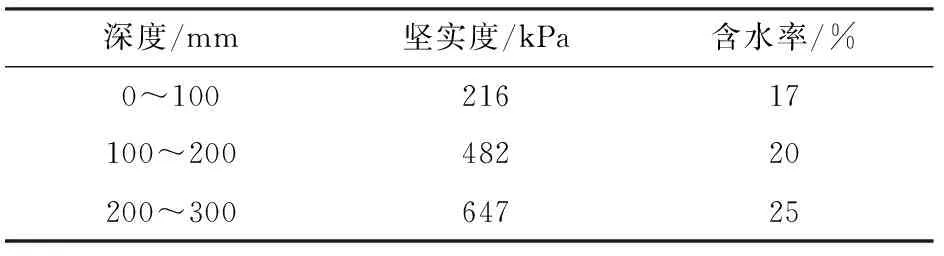
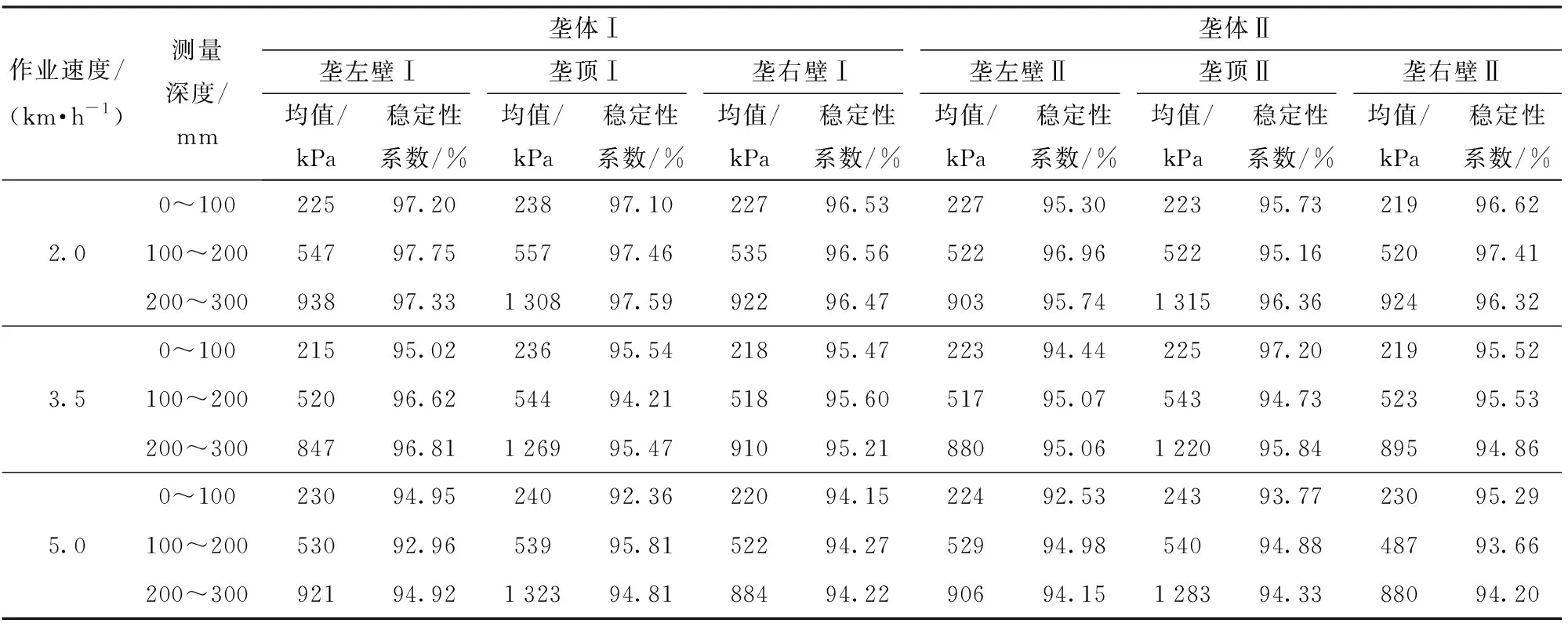
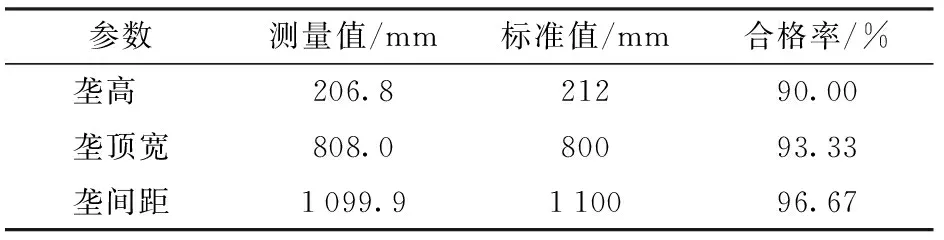
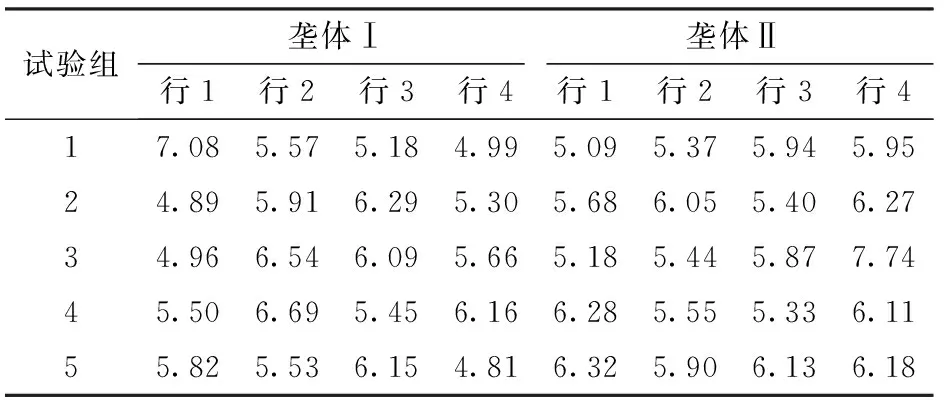
d (10) 根据前述起垄成型装置参数,计算得起垄辊转轴与旋耕刀轴之间的高度差d为22 mm。 小白菜复式播种机犁旋辊压驳岸型起垄装置的工作质量主要与土壤状况、旋耕导土装置和起垄辊的结构参数有关。为确保作业效果达到设计的技术要求,2020年9月9日于武汉市农业科学院农业机械化研究所蔬菜机械化展示区示范田开展田间开沟起垄性能试验,如图9所示。试验前需对田块特性进行测定,其特性参数见表2。 表2 田块特性参数Tab.2 Characteristics parameters of experimental field 田间试验的配套动力为东风井关T954型拖拉机,经预试验确定拖拉机液压手柄挡位与机具作业高度之间的关系,手油门调至最大挡位以保证机具作业参数一致。试验机组确保直线方向前进,作业距离为30 m,作业速度分别为2.0、3.5、5.0 km/h,测距雷达安装位置与地表垂直距离约为0.8 m,扫描采样频率设置为70 Hz,角度分辨率设置为0.881 2°,采样角度范围为90°~180°。 试验机具为华中农业大学自行研制的工作幅宽为2 200 mm的小白菜复式播种机。试验器材包括:卷尺(3 m)、直尺(500 mm)、土壤水分检测仪(浙江托普仪器有限公司,精度0.01%)、土壤坚实度检测仪(浙江托普仪器有限公司,0.5% FS)、自制垄型测绘装置(图10)和小白菜种子(中箕青605)。 3.3.1土壤坚实度及稳定性系数评价指标 起垄装置作业后的垄体土壤坚实度是确保种床抵抗自然侵蚀而保持稳定的关键因素,影响小白菜种子的出苗率。根据试验方法,利用小白菜复式播种机犁旋辊压驳岸型起垄装置在未耕土壤区域进行开沟起垄作业,作业后立即测量垄体坚实度,沿机组前进方向每隔4 m进行垄体土壤坚实度测量,每一截面测量位置如图11所示。 依据标准JB/T 8401.2—2017《旋耕联合作业机械 第2部分:旋耕深松灭茬起垄机》要求以垄体土壤坚实度、垄体土壤坚实度稳定性系数为评价指标[33]。 3.3.2垄高、垄顶宽及垄间距合格率评价指标 垄高、垄顶宽及垄间距合格率是衡量起垄质量的重要指标,本试验分别取垄高h为212 mm,垄顶宽L2为800 mm,垄间距S2为1 100 mm。作业后,基于自制垄型测绘装置所测定的数据,每个行程选取5个点,每点所测范围为一个工作幅宽,分别以垄高、垄顶宽以及垄间距在农艺要求的-30~30 mm范围内为合格,合格的垄体参数占对应的总数百分比为垄体参数合格率。 3.3.3垄顶厢面粗糙度评价指标 小白菜种子属于小粒径种子范畴,机播时要求良好的种床,有利于控制播深以确保成苗率。而地表过度粗糙则不利于控制播深,因此小白菜直播作业所形成的垄顶粗糙度可用均方根高(RMSH)表征。由于垄顶厢面空间上的高度差异性,影响计算区域尺度,为探究不同尺度间厢面粗糙度的变化规律,可通过多次采样局部地表高度数据,以此分析厢面粗糙度的局部变化特征。 3.3.4各行平均苗数及单行苗数变异系数评价指标 种床构建垄体的好坏直接影响小白菜播种均匀性及出苗率。整机作业35 d后,双垄各行测5段,每一段截取1 m范围内的小白菜苗数[34],通过测定每行苗数、单行苗数变异系数以及各行苗数一致性变异系数以验证小白菜复式播种机犁旋辊压驳岸型种床起垄装置的综合性能。 基于垄型测绘装置测量数据,进行误差补偿处理及有效区域提取,导入Matlab软件所得三维数字化模型如图12所示。从图中可看出,在该采样频率下测量数据生成的三维数字化模型可以较好地重构原有垄体轮廓和构型特征,结果与实际地表地貌高度吻合,单次测量区域精确覆盖了完整的起垄区域,为进一步评价起垄装置的结构特征提供了准确的数据。 3.4.1土壤坚实度测量与分析 土壤坚实度是体现垄体土壤强度的一个重要指标,土壤坚实度过小会影响小白菜垄播种床的稳定性。在长江中下游土壤黏重板结的条件下,由于垄壁坍塌导致垄顶宽不稳定,小白菜垄播时会因种床带破坏而降低成苗率。整机前进速度是影响垄体坚实度的重要因素,不同作业速度条件下的垄体坚实度测定结果见表3。 表3 田间作业后的土壤坚实度测定结果Tab.3 Performance test results of soil firmness after field operation 根据表3可知,作业后的垄体土壤坚实度平均值随测量深度的增加而增大,垄体土壤坚实度稳定性系数相对平稳。其中垄顶坚实度平均值在各深度均高于垄壁坚实度,由于起垄过程中垄壁主要由起垄辊圆盘压实土壤,而垄顶主要由起垄辊圆筒压实土壤,由于旋耕刀定向抛土至垄顶处,叠加压实土量增大了对土壤的碾压力,从而增大了垄顶处的土壤坚实度。不同作业速度下相同测量深度的稳定性基本一致,双垄垄顶处土壤坚实度均值范围为223~1 323 kPa,土壤坚实度稳定性系数均不低于92.36%;双垄垄壁处的土壤坚实度均值范围为215~938 kPa,土壤坚实度稳定性系数均不低于92.53%,适合小白菜复式播种机垄播作业。 3.4.2垄高、垄顶宽及垄间距合格率分析 根据前述标准要求,以垄高合格率、垄顶宽合格率以及垄间距合格率为起垄质量评价指标进行计算,测定结果见表4。 表4 垄高、垄顶宽及垄间距Tab.4 Height, top width and spacing of ridges 根据试验结果可知,小白菜复式播种机犁旋辊压驳岸型种床成型装置起垄质量良好,垄体一致性好,作业后的垄体的垄高合格率、垄顶宽合格率和垄间距合格率分别为90.00%、93.33%和96.67%。 3.4.3垄顶厢面粗糙度分析 传统的厢面粗糙度统计一般限于厢面宽度方向,无法全面地反映地表粗糙度状态,而小白菜直播作业后的种床由于受到开沟器的作用而形成沿作业方向分布的种沟痕迹,此痕迹主要受地表非规则的微起伏影响。为更真实反映起垄后垄顶厢面高度分布的特征,取一垂直机组作业方向截面,且沿机组作业方向选取5 m长垄体,每隔10 mm扫描一次,每1 m为1组拼接而成,以前述采样频率扫描截面轮廓高度,按小白菜种植行数所形成的垄顶厢面各行地表轮廓如图13所示。由图中可知,种床各行小白菜粗糙度表现为均匀分布的特征,其同行内没有明显的高度变化,各行之间略有不同,与实际作业相吻合。 表5为小白菜精量复式播种机作业后不同行的垄顶厢面地表粗糙度,从表中可得知机组作业方向不同行的最大差值为2.19 mm。对作业后垄体地表粗糙度的标准差进行统计发现,均方根高度标准差较小。 表5 不同行的垄顶厢面地表粗糙度均方根高度Tab.5 Root mean square height of ridge surface roughness in different rows mm 3.4.4各行平均苗数及单行苗数变异系数分析 根据原测定数据可得小白菜的各行平均苗数及单行苗数变异系数,如图14所示。 由图14可知,小白菜各行的平均苗数及其变异系数均属于合理范围。其中,小白菜各行1 m内平均苗数为10,单行苗数变异系数为6.32%~8.51%,各行苗数一致性变异系数为9.05%,满足农业实际生产中小白菜精量机播要求。 综合田间作业性能对比可知,小白菜复式播种机犁旋辊压驳岸型种床起垄装置作业的性能优于JB/T 8401.2—2017《旋耕联合作业机械 第2部分:旋耕深松灭茬起垄机》的质量要求。 (1)对种床成型装置的关键部件进行了设计与分析,根据起垄辊运动模型,确定了单个垄体截面面积为0.18 m2,垄体高度为212 mm,机组前进速度为2.0~5.0 km/h,旋耕刀轴转速为160~340 r/min,起垄取土高度为182 mm,犁旋辊压驳岸型种床成型装置以联合作业方式提高了整机起垄的通用性。 (2)垄体土壤稳定性分析结果表明,垄体土壤坚实度平均值随测量深度的增加而增大。双垄垄顶处的土壤坚实度稳定性系数均不低于92.36%,双垄垄壁处的土壤坚实度稳定性系数均不低于92.53%,起垄作业满足起垄农艺要求。 (3)田间性能试验表明,犁旋辊压驳岸型种床成型装置作业后的垄体的垄高合格率、垄顶宽合格率和垄间距合格率分别为90.00%、93.33%和96.67%。采用相同采样间隔的垄顶厢面粗糙度统计结果表明,机组作业方向不同行的最大差值为2.19 mm,同一行内的小白菜种床厢面粗糙度无明显差异。 (4)田间播种试验表明,采用犁旋辊压驳岸型种床起垄装置作业形成的种床效果较好,小白菜各行1 m内平均苗数为10,单行苗数变异系数为6.32%~8.51%,各行苗数一致性变异系数为9.05%,满足农业实际生产中小白菜精量机播要求。3 起垄性能试验
3.1 试验方法
3.2 试验设备与仪器
3.3 评价指标
3.4 试验结果与分析
4 结论
猜你喜欢
中国建筑装饰装修(2022年19期)2022-10-31
——以临夏市东郊生态公园为例
城市建筑空间(2022年7期)2022-08-24
农业技术与装备(2021年3期)2021-12-01
放学后(2021年11期)2021-07-12
——以中山市逸仙湖为例
现代园艺(2021年6期)2021-04-09
今日农业(2020年22期)2020-12-14
大众文艺(2019年16期)2019-08-24
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
作文世界(小学版)(2017年8期)2017-09-07
