一种全对称八质量MEMS陀螺的设计
2021-12-06 03:13李毅轩
中国惯性技术学报 2021年4期
姜 波,李毅轩,苏 岩
(南京理工大学 机械学院,南京 210094)
凭借体积小、质量轻、可批产的优势,MEMS陀螺受到了较大的关注和广泛的应用。2011年前后,美国DARPA开展Micro-PNT专项资助,多家科研机构参与到该项目的研制中。针对全对称平面MEMS陀螺,国际上研究的优势单位包括波音公司、加州大学欧文分校、佐治亚理工、斯坦福大学等。2014年波音报道了角度随机游走为的硅基多环环形陀螺,引起了学术界广泛的关注[1]。2018年,加州大学欧文分校报道了基于一种环形陀螺的Micro-PNT样机,其零偏稳定性达到1.3 °/h,角度随机游走达到该报道表明微机电陀螺具备实现自主导航的潜力。佐治亚理工的Ayazi团队的代表结构为高频、整盘结构,Q值高、谐振频率极高,工作在MHz量级,具备工作在低真空甚至空气中的潜力。2019年,提出了一种基于单晶SiC作为谐振子的高谐振频率盘式结构,Q值高达1千多万,谐振频率为5.3 MHz[3];同年,硅基体声波陀螺工作在4.3 MHz,3θ模态下量程达到了±1000 °/s;2020年,报道的陀螺角度随机游走零偏不稳定性0.85 °/h[4]。斯坦福大学设计的陀螺的结构特点是采用了外延生长的多晶硅,该种工艺接近于半导体工艺,被广泛应用于消费级陀螺的制造工艺中[5]。该种工艺路线导致了其电极面积小,摆放自由。2020年斯坦福团队报道了一种1:2内共振的多环结构[6,7],该类陀螺频率稳定性提升了4倍,振幅稳定性提升了10倍;比起线性振动模态信噪比提高35 dB。
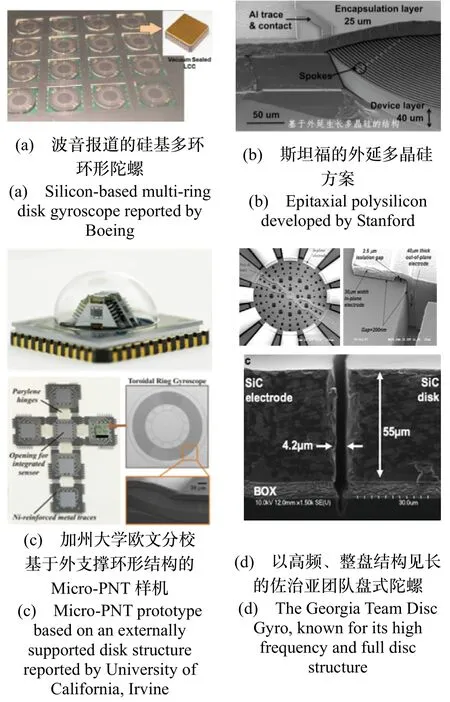
图1 国际上全对称MEMS陀螺Fig.1 Fully symmetrical MEMS gyroscope in the world
硅基环形MEMS陀螺也引起了国内研究单位的关注。南京理工大学设计了高Q值外支撑的谐振子结构[8],使得工作频率为第一阶模态(16 kHz),且距离干扰模态多达15 kHz,极大提升了结构的抗振动特性;清华大学设计了基于四质量的全对称MEMS陀螺方案[9]。随着导航级精度的需求和环境适应性(温度、振动)的需求,现有硅基环形MEMS陀螺也面临一些挑战,其中最为突出的包括等效质量低、大驱动位移下的非线性效应突出。对于工作在模态匹配下的科氏力振动陀螺,谐振子机械噪声可以表示为:

其中,kB和T分别是玻尔兹曼常数,ωx、ωy和Qx、Qy分别是两个轴的谐振频率与Q值,meff为谐振子等效质量。从式(1)中可以看出,在没有频差的情况下,谐振子等效质量越大,y轴Q值越高,谐振频率越低,谐振子噪声越低。受限于抗振动特性的要求,在一定的工作频率下,更大的等效质量、驱动位移和Q值,会提供更低的机械噪声。
针对上述问题,本文提供了一种基于多质量块的全对称MEMS陀螺。该陀螺工作在20 kHz附近,有效避免了低频振动对谐振子的影响;该结构还具有更大的等效质量,并通过内置变面积梳齿电容结构,可以避免大驱动位移下的非线性效应。该结构具有形成高性能MEMS陀螺的潜力。
1 全对称八质量MEMS陀螺结构设计
1.1 全对称多质量MEMS陀螺工作原理
全对称多质量陀螺是由多个质量块构成的MEMS平面陀螺[10]。其工作原理如图2所示。和环形陀螺一样,谐振子具有两个频率相同的退化模态,分别为运动状态I和运动状态II。两个谐振状态具有相同频率的退化模态,且夹角为45 °。在驱动力的作用下,结构如运动状态I谐振。此时,质量块的运动分为径向和周向两个方向。在垂直于平面的角速度作用下,周向运动和径向运动的质量块受科氏力作用。科氏力的指向恰好可以改变质量块的运动方向,将运动状态I切换为运动状态II。同样,在科氏力作用下,运动状态II又转换为运动状态I,从而形成了类似于驻波进动的效应。
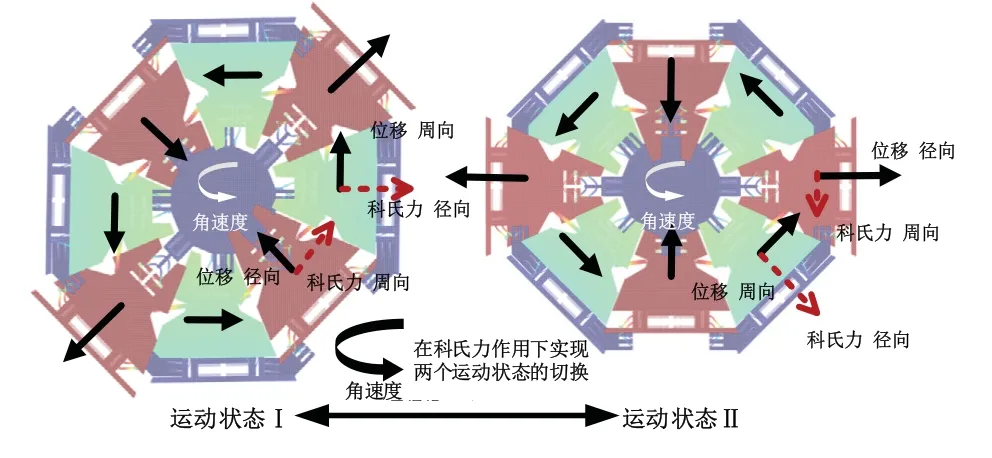
图2 全对称多质量MEMS陀螺工作原理Fig.2 The operation principle of fully symmetric multi-mass MEMS gyroscope
工作在2θ的全对称多质量陀螺,振型夹角为45 °,需要八个质量块实现振型的进动。如图3所示,全对称多质量陀螺也可以工作设计为3θ振型。此时需要12个质量块实现进动。与八质量陀螺一样,十二质量陀螺也具有相同的退化模态,振型夹角为30 °。
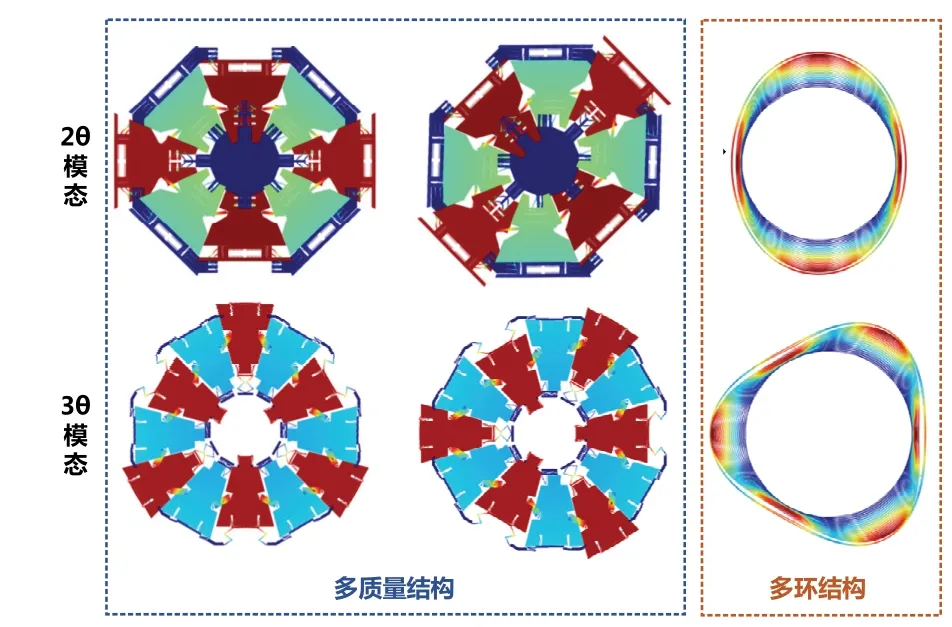
图3 全对称多质量陀螺和MEMS环形陀螺2θ/3θ工作模态Fig.3 Fully symmetrical multi-mass gyroscope and MEMS disk Gyroscope 2θ/3θ mode
1.2 全对称多质量MEMS陀螺模态分布
本文针对八质量陀螺开展了结构设计。如图4所示为该结构的谐振模态和振型分布。第一阶模态为16 kHz,为平面内旋转振型;第二阶模态为单侧平动模态,为17 kHz;第三阶模态为20 kHz,该模态为工作模态,并且距离附近的干扰模态最低为3 kHz。第四阶模态为23.4 kHz,也是平面运动模态。最近的面外模态在第六阶,为33 kHz。从结构的模态分布来看,结构具有较好的抗面外振动的特性。
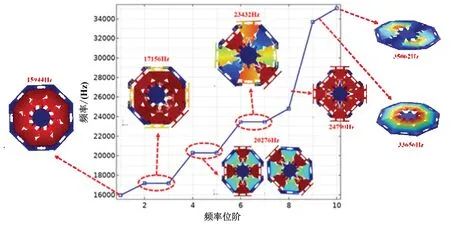
图4 全对称八质量陀螺模态分布Fig.4 The mode distribution of fully symmetrical eight-mass gyroscope
如图5所示为单端驱动和双端驱动情况下的谐响应曲线。对于两类驱动方式,最低驱动模态都在17 kHz,有效抑制了低频振动对结构的干扰。而在单端驱动下,第二阶、第三阶和第四阶平动模态都被激发了。该结构也可以工作在双端驱动模式下,在双端驱动模式下,仅工作模态被激发了,有效抑制了第二阶和第四阶模态。
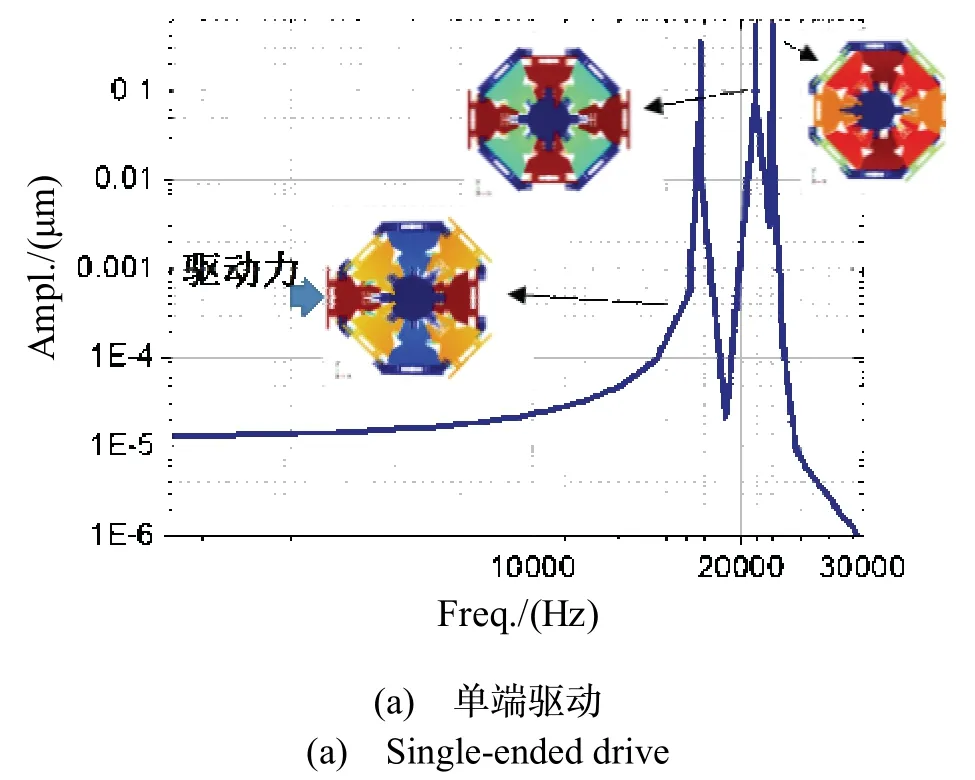
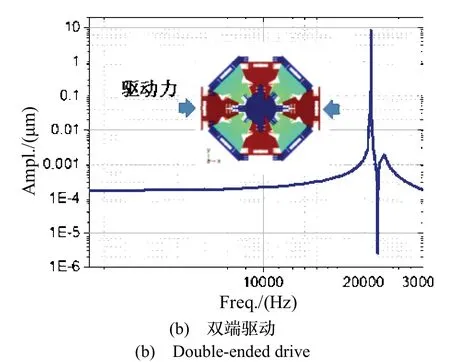
图5 单端驱动和双端驱动情况下的谐响应曲线Fig.5 The harmonic response curves of single end drive and double end drive
1.3 正交抑制方案
由于加工误差的原因,谐振子的刚度轴与电极轴总会存在一个夹角,即刚度轴偏转。因此,一个轴的能量会耦合到另一个轴上,即正交输出。结构设计了正交抑制方案来抑制结构的偏转,同一电位电压施加在三角形正交抑制电极上。所形成的电场分布以及施加正交抑制电压后,正交电极所对应的位移变化如图6所示。结果显示,随着电压的升高,差分输出由原来的完全对称向一侧变化。通过该电极,可以较好的调节由于工艺误差导致的刚度轴偏转,降低模态匹配下的正交信号输出。
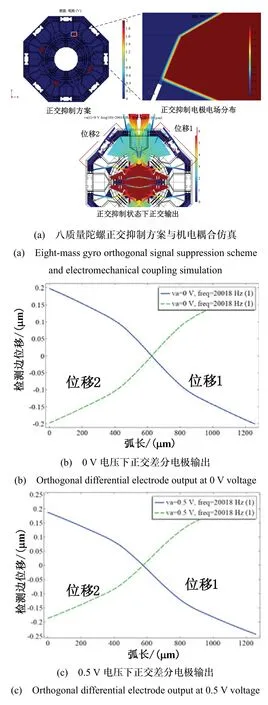
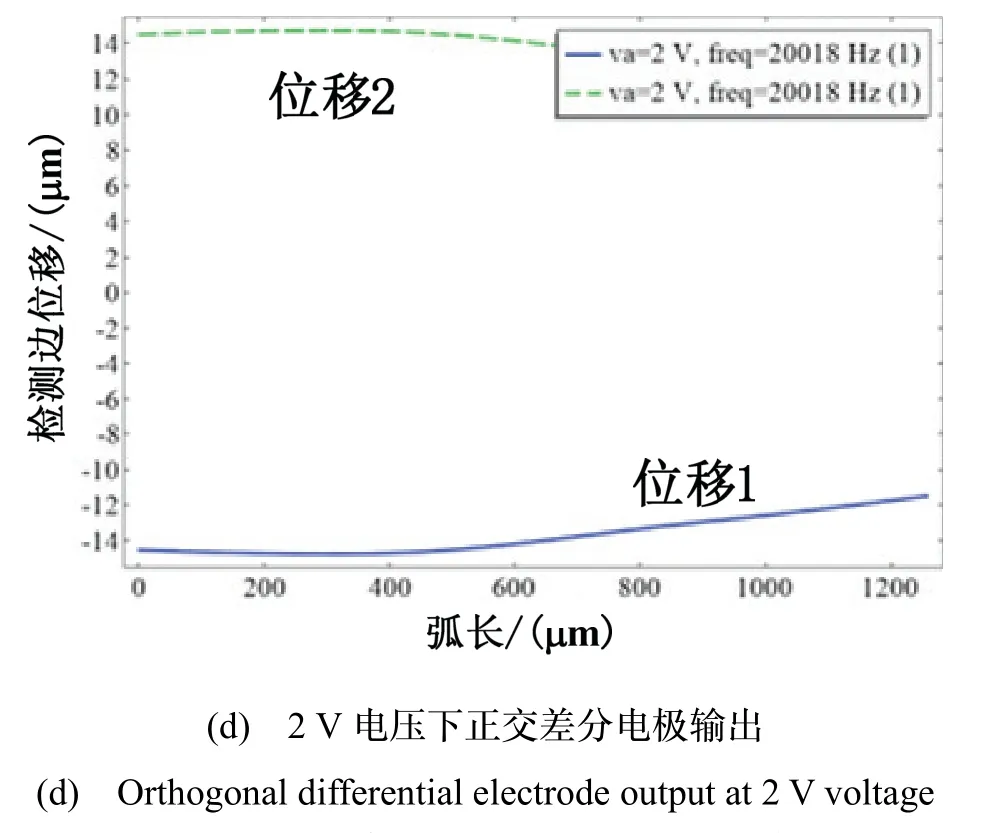
图6 全对称八质量陀螺正交抑制方案Fig.6 The quadrature control scheme for fully symmetric eight-mass gyroscope
2 全对称八质量MEMS陀螺结构版图设计与加工
图7展示了八质量MEMS陀螺结构层版图,并通过MEMS工艺完成了加工。图7还展示了加工后结构的局部显微镜照片。谐振子包括八个质量块,以及相连接结构。质量块两端是分别连接中心锚点和四周锚点的解耦梁。特别是外层解耦梁,保证了外部质量块只能沿径向运动。在该部分质量块中,布置了变面积驱动梳齿,从而增加了电容量。
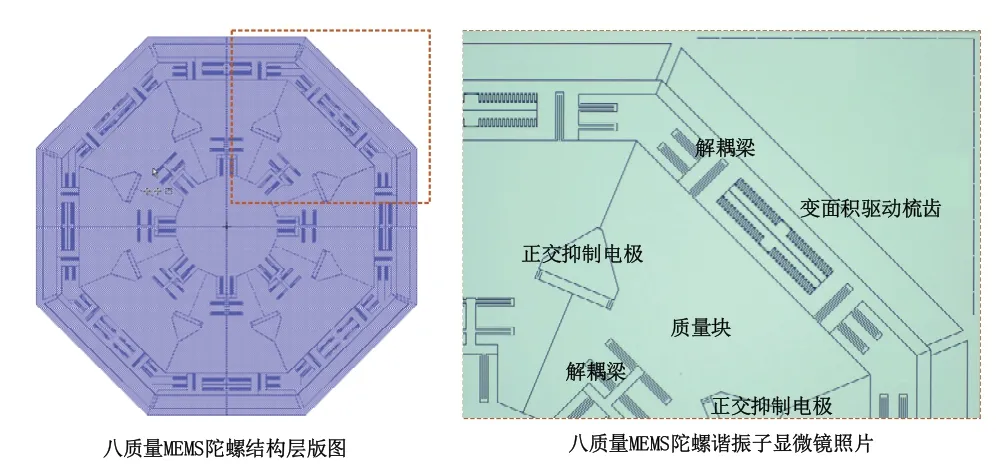
图7 全对称八质量陀螺版图设计与加工Fig.7 The layout design and processing of fully symmetrical eight-mass gyroscope
本文梳理总结了本文所报道的八质量陀螺与外环支撑环形陀螺以及嵌套环环形陀螺的设计参数对比,如表1所示。本文所描述的八质量陀螺工作在21 kHz,具有加好的抗振动特性。结构角增益系数0.24,这是因为一部分质量块被周向解耦,仅允许径向的自由度。谐振子具有较少的梁,不考虑空气阻尼的情况,设计Q值55万,有利于进一步增大谐振子机械灵敏度。结构等效质量4.83 mg,是同等多环结构等效质量的3倍以上,具有更好的科氏效应。按照式(1)测算,其结构的机械噪声约为1.90×10-3°/。
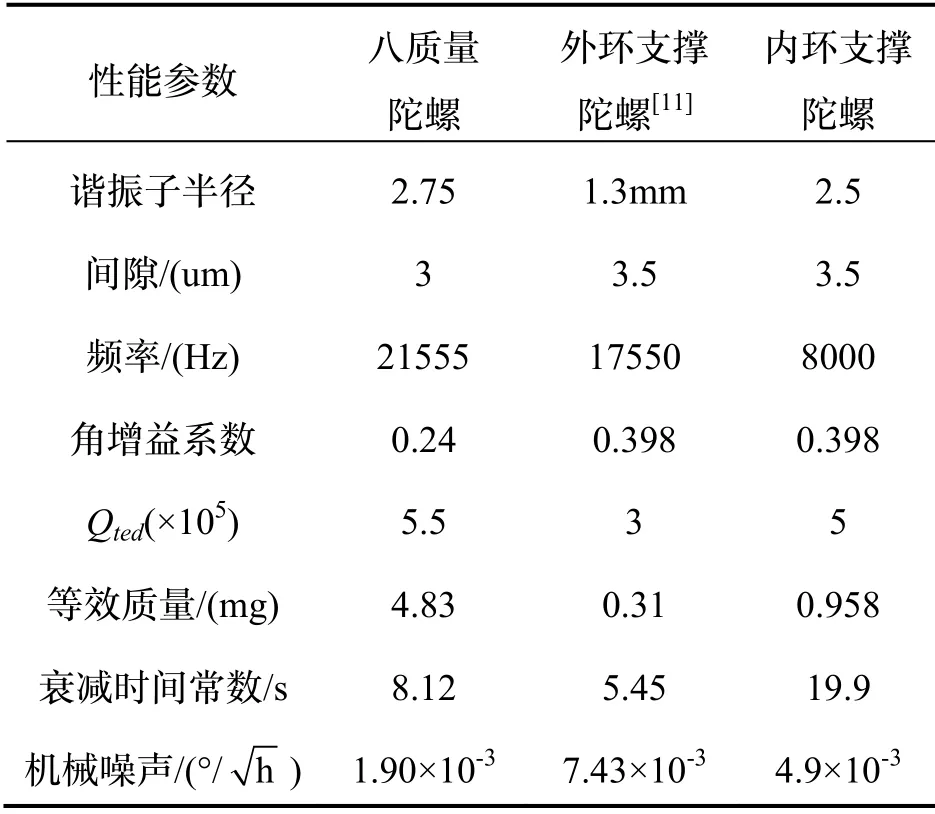
表1 八质量陀螺与环形MEMS陀螺谐振子设计指标对比Tab.1 The comparison of resonator design indexes between eight-mass gyroscope and ring MEMS gyroscope
3 结 论
本文报道了一种全对称八质量MEMS陀螺,该结构具有较好的对称性。结构通过质量块以及耦合梁实现了2θ工作模式,可以工作在全角模式下。谐振子结构具有敏感质量大、电容量大的优势,有希望成为下一代高性能、轻小型、快速响应陀螺。
猜你喜欢
佳木斯大学学报(自然科学版)(2020年3期)2020-10-26
小学生学习指导(低年级)(2019年10期)2019-10-16
中国惯性技术学报(2019年1期)2019-05-21
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
城市轨道交通研究(2015年3期)2015-02-27
原子与分子物理学报(2014年4期)2014-02-28