电磁导航辅助下椎弓根钉植入治疗胸椎骨折1例
2021-12-05 08:33:44贾广侯余志平丛海波
中国现代手术学杂志 2021年6期
贾广侯,余志平,丛海波
(1.潍坊医学院,山东潍坊 261000;2.威海市中心医院骨科,山东威海 264400)
临床上针对脊柱骨折一般使用手术内固定治疗,可促进患者脊柱功能恢复,并保障其稳定性[1]。椎弓根钉植入是治疗胸椎骨折最常见的方式之一,徒手置入椎弓根螺钉依赖于术者对于解剖标志辨识及经验,即使有经验的脊柱外科医生也存在着椎弓根螺钉置入不理想的结果[2]。近年来,手术导航系统水平高速发展并应用于诸多骨科领域。威海市中心医院骨科于2020年6月完成电磁导航辅助下椎弓根钉植入治疗胸椎骨折1 例,现报道如下。
1 病例介绍
患者男,50 岁。因车祸伤致骶部、胸背部疼痛、活动受限2.5 h 于2020年6月入院。入院查体:脊柱弯曲正常,腰背部查体因疼痛未配合。双侧肱二头肌肌力3+级,伸腕肌力3+级,屈指肌力3+级,双侧髂腰肌肌力3 级,股四头肌肌力3 级,踝关节背伸肌力3+级,伸趾肌力3+级,腓肠肌肌力3 级。急诊行CT 检查示胸椎压缩性骨折,双侧多发肋骨骨折,L3、L4 右侧横突骨折,左侧髂骨骨折。入院1 d 行胸椎MRI 示:胸椎压缩性骨折(T3、T5)(图1)。患者初步诊断为:胸椎压缩性骨折(T3、T5)。
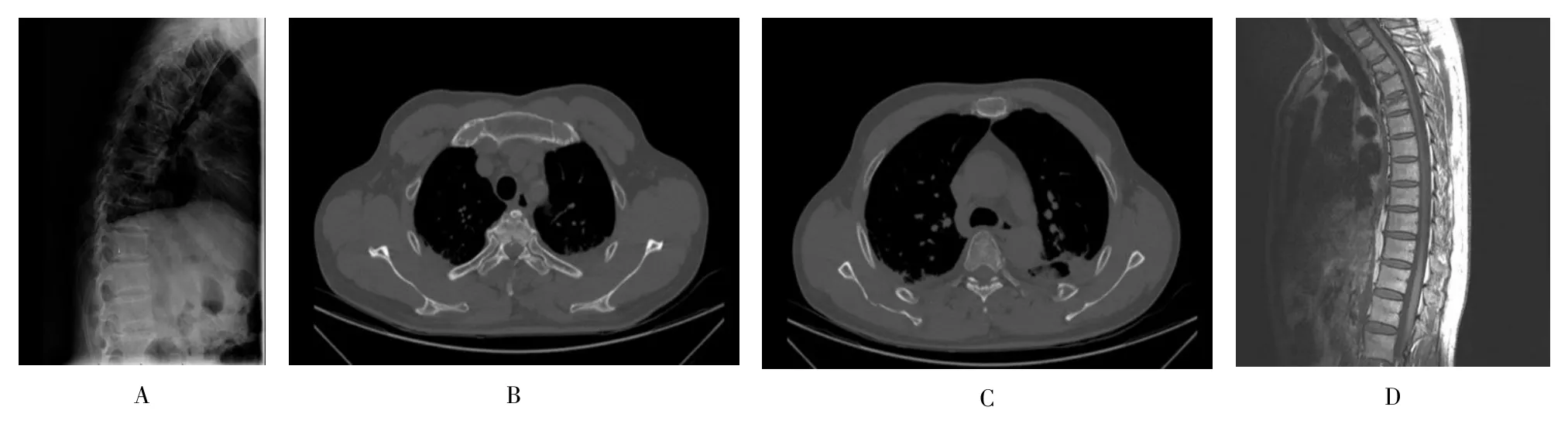
图1 术前胸椎侧位片(A)、胸椎CT(B、C)及MRI(D)示T3、T5 胸椎压缩性骨折
入院后给予常规消肿、止痛等治疗。10 d 后患者病情稳定,复查胸部CT,示左肺下叶空洞伴气液平面,因疼痛未配合行CT 引导下穿刺,给予雾化等对症支持治疗。入院16 d 评估患者可耐受手术后,拟在电磁导航(山东威高集团有限公司)辅助下行胸椎骨折钉棒系统内固定术。全麻下,患者取俯卧位,自T2 至T5 棘突切开皮肤、皮下组织,长约10 cm,分离组织及肌肉显露T3~T5 棘突、椎板、横突、关节突关节,将光学导航定位器安装至T5 棘突。然后,术中CT 扫描脊柱,将数据导入电磁导航系统构建脊柱三维模型,采取四点配准法进行配准;用鼠标在三维重建图像上,按顺序选择4 个分散点,完成图像选点(图2)。将电磁导航系统自配探针点置于与图像选点相同位置(图3),并保持静止1 s,该点自动被系统选中,完成4 个分散点操作后软件自动进行粗配准;再用探针在患者脊柱划动,进行“患者点云选择”,完成精确配准。完成光学导航手术器械配准后进行光学导航验证,经验证通道深度及角度位置满意后,植入椎弓根螺钉(图9),将连接棒穿入、固定,锁紧钉棒连接,将胸3、胸5 椎体高度及椎间隙的正常高度恢复后,锁紧钉棒结合部螺帽,术中CT 透视见内固定位置良好,骨折复位满意,固定效果满意(图10)。
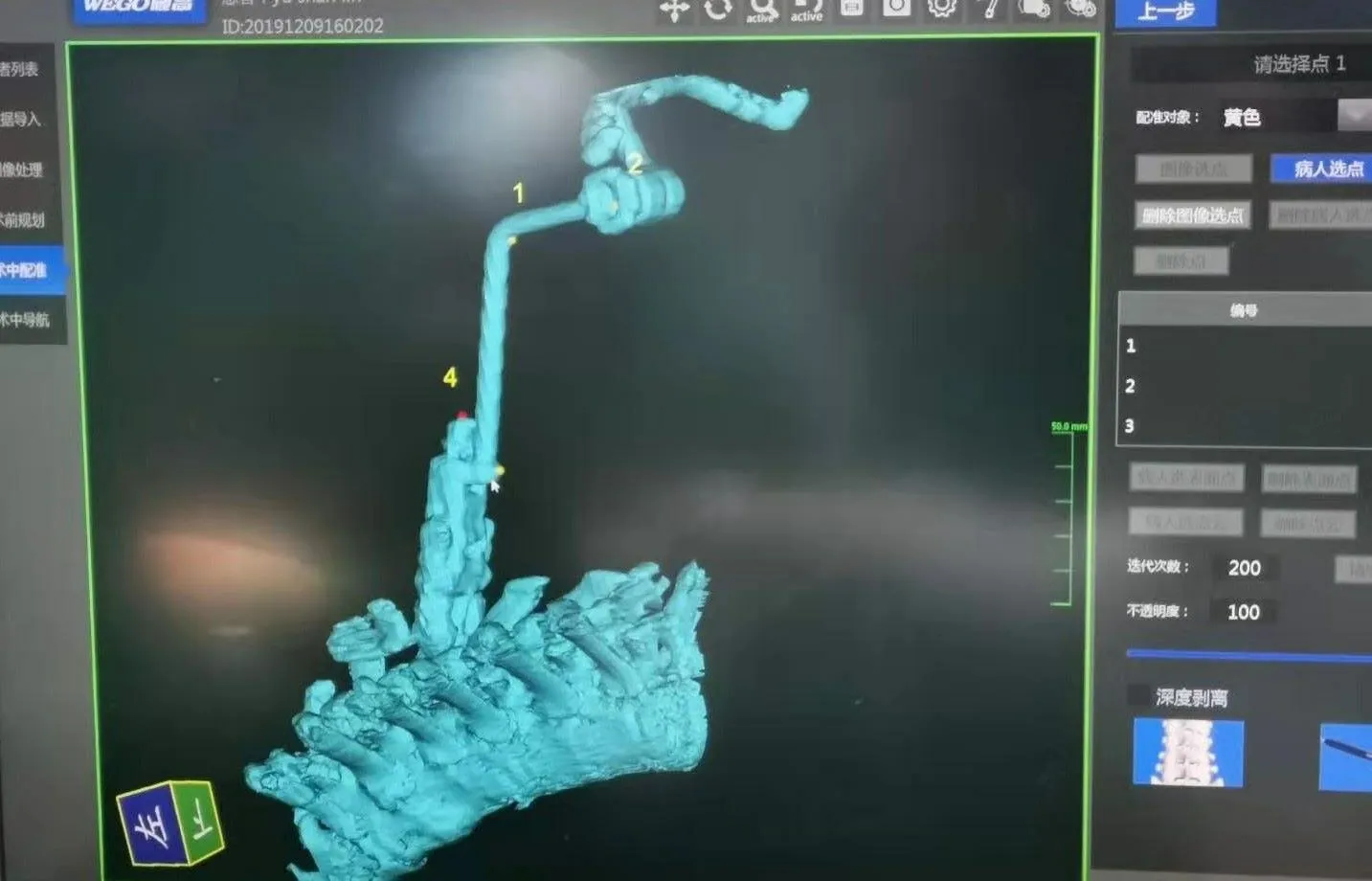
图2 将术中CT 数据导入电磁导航工作站中并完成三维重建选点

图3 将电磁导航系统自配探针点在与图像选点相同位置完成配准
通过电磁导航导视系统用探针在患者脊柱上设计最佳开路器入路角度及进针点并做好标记(图4);使用开路器开路逐步扩通通道并实时经电磁导航探针验证(图5~7),依次完成6 个通道扩张并再次进行电磁导航探针验证;电磁导航验证满意后使用光学导航O 形臂扫描患者脊柱影像资料(图8),
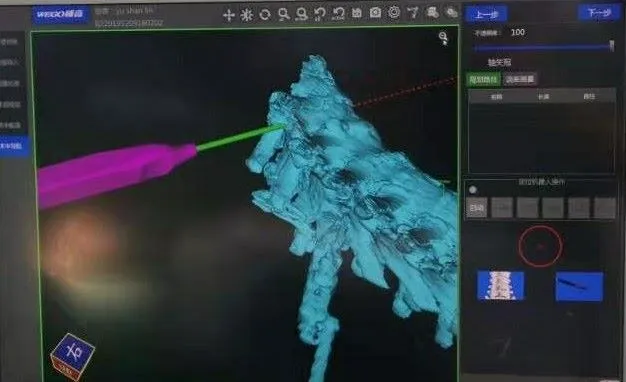
图4 使用电磁导航探针设计最佳开路器入路角度及进针点
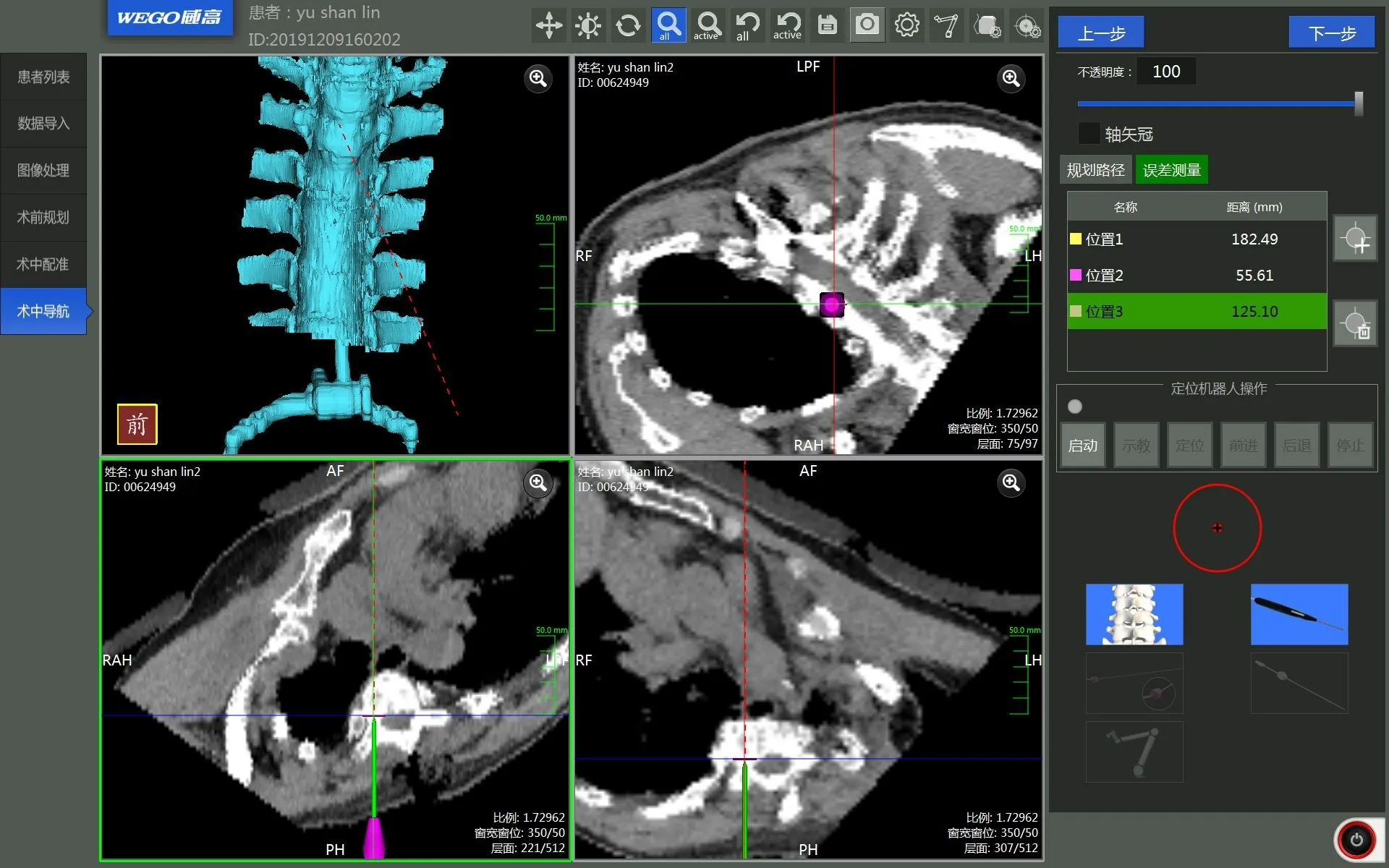
图5 术中电磁导航工作站实时进行验证

图6 完成通道扩通并实时进行电磁导航验证
图7 电磁导航工作站示通道扩通完毕且位置满意

图8 使用光学导航O 形臂进行患者脊柱数据扫描

图9 光学导航实时验证钉道扩通完成且位置满意
椎弓根钉植入完毕后术中CT 实时扫描患者脊柱数据,示椎弓根钉植入位置良好(图10)。内固定术后1 d 复查X 线片、CT 显示内固定位置满意(图11)。术后切口Ⅰ期愈合,2 周后拆线。术后4 个月X 线片示内固定位置满意(图12)。患者恢复良好,可下地活动,无不良反应。

图10 术中CT 示椎弓根钉植入位置良好
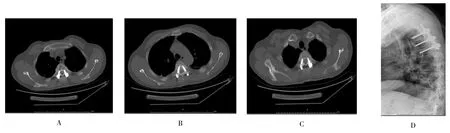
图11 术后X 线及CT 示椎弓根钉位置良好

图12 术后4 个月X 线复查示椎弓根钉位置良好
2 讨 论
椎弓根螺钉内固定技术是脊柱外科的核心技术之一,但即便是有着丰富的临床经验及大量手术操作例数作为支撑的医生,徒手进行椎弓根螺钉的置入也难以完全避免椎弓根螺钉穿破椎弓根皮质、损伤周围组织,有报道称透视引导的置钉成功率约为90.3%~94.1%[3]。随着技术进步,骨科手术机器人在脊柱外科领域的应用越来越广泛,手术安全性及植钉准确度得到显著提高[4]。van Dijk 等[5]分析机器人辅助下完成椎弓根螺钉植入准确度,结果显示根据Gertzbein-Robbins 分级标准,机器人辅助下植入的487 颗螺丝中的477 颗(97.9%)放置位置满意(<2 mm,A+B 类),C 类8 颗螺钉,D 类1 颗,明显高于徒手组植入准确度。Keric 等[6]在机器人引导的脊柱椎弓根钉植入术中总共植入了2 067 颗螺钉,通过术后CT 评估了1 857 颗螺钉。在1 857 颗螺钉中,有1 799 颗(96.9%)被归类为具有可接受的或良好的位置,而38 颗螺钉(2%) 的偏差为3~6 mm,而20 颗螺钉(1.1%)的偏差大于6 mm。Macke 等[7]应用骨科机器人辅助技术治疗青少年特发性脊柱侧弯也得到了类似结论。目前市场上导航系统主要有光学导航、电磁导航、超声导航等。其中光学导航定位精确,但是存在手术视线遮挡、易受环境光干扰、人机协同交互能力弱、制造工艺及产品标准缺失的缺点;而超声导航具有无创伤、无辐射、操作简便的优点,但是单纯二维超声会受到图像显示的限制,造成三维空间定位不精确甚至偏移;电磁导航不受手术视线的遮挡、可视光干扰,在骨科手术中存在较大优势[8]。
综上所述,在胸椎椎弓根螺钉植入手术中,与徒手植钉技术相比,电磁导航系统辅助椎弓根螺钉植入具有更高的植钉准确率、较高的安全性与准确性,且此病例中术中透视次数为3 次(包括验证透视在内),术中透视次数更少,优势明显。
猜你喜欢
中国临床医学影像杂志(2021年5期)2021-08-13 09:01:36
中华养生保健(2020年4期)2020-11-16 01:31:36
广东医科大学学报(2020年4期)2020-08-24 07:11:16
中国医药指南(2019年27期)2019-10-22 03:33:24
浙江中西医结合杂志(2019年7期)2019-07-27 08:54:02
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:04
中华骨与关节外科杂志(2016年5期)2016-05-17 06:10:52
云南中医学院学报(2014年4期)2014-07-31 18:22:23
现代医药卫生(2014年18期)2014-03-11 19:33:20
中国中医药现代远程教育(2014年20期)2014-03-01 04:31:27