三维流场测量中的微风量多传感器数据融合
2021-12-03 03:27肖欣招刘建旭伍国靖付东翔
电子科技 2021年12期
肖欣招,刘建旭,伍国靖,付东翔
(1.上海理工大学 信息化办公室,上海 200093;2.上海理工大学 光电信息与计算机工程学院,上海 200093)
三维空间的流场测量方法包括接触式和非接触式。接触式测量通过风速传感器如热线风速仪、多孔方向压力探针等常规传感器来测量空间内的各点风速,通过数据拟合得到整个空间的流场分布。非接触式测量包括基于光学方法的激光多普勒测速(Laser Doppler Velocimetry,LDV)法和粒子成像测速(Particle Image Velocimetry,PIV)法[1-3],以及基于超声波的超声多普勒测速(Ultrasound Doppler Velocimetry,UDV)测量方法。LDV应用多普勒效应,利用激光的高相干性和高能量测量流体或固体的流速[4]。PIV是一种基于粒子示踪和粒子图像处理算法的流场测量技术[5-7]。UDV基于脉冲超声回波技术,通过检测流体中分散的微小示踪粒子相位变化来实现流体流场的测量[8]。上述非接触式测量方法通常只能应用于在局部小范围空间进行三维流场测量,例如发动机内部某个区域、局部管道或者阀门内部等[9]。因此,基于接触式测量的三维流场测量仍然是一种常用的测量方法。
本文针对三维流场测量中的多传感器数据融合进行研究。该测量对象为有人工作环境的封闭舱室,微风速流场分布测量可为其通风系统的风速、风向及风机功率等参数提供设计依据。较大室内空间尺寸(例如10 m×2 m×2 m)由于测量空间较大,故采用多只传感器组成的传感器阵列进行风速测量。在这种测量方式中,虽然每个传感器经过了标准数据的标定,但实际使用中仍然会出现无效数据。微风量风速传感器的量程较低,基于单纯最小二乘法建立的线性模型也无法完全反映传感器的实际测量特性[10]。此外,多只传感器数据需要融合,同一测量点微风速条件下的多个传感器测量值跳变范围大,无效数据时有出现。因此排除无效数据、融合有效数据是保证微风速流场测量值准确的关键。
本文提出一种基于相关性函数-卡尔曼滤波算法的多传感器数据融合算法。在上述三维微风速流场测量中,对多个风量传感器进行数据测量,采用相关性判定方法,剔除测量异常数据和无效数据。基于卡尔曼滤波方法[11],将传感器标定的输出数据和方差作为初始预估值和初始方差估计,进行多个风量传感器数据的融合。与普通标定的传感器测量数据相比,新方法提高了风量数据的测量精确。测量实验验证了该方法的有效性,说明使用该方法可确保三维空间微风速流场测量数据的精确性和可靠性。
1 测量原理
根据测量要求,测量系统是对一个封闭的类长方体空间进行各个点的风速测量,采集空间内的各点风速数据,经过数据处理即可得到各个截面的二维风速流场以及整个三维空间的流场分布,为该封闭舱室的通风系统设计提供依据。因此测量方案需在测量空间中划分出一系列测量点。如图1所示,这些点上限至天花板附近,下限至地板附近,左、右限接近墙壁。通过分别测量这些网格点风速,可测定出测量空间流场分布。
图1(a)是一个网格测量点截面,整个测量空间被划分成很多个截面,需对多个位置的点进行测量。如果每点都布置传感器,一方面需要大量传感器,增加了系统成本;另一方面密布的大量传感器及安装支架会对空间流场产生较大影响,使得测量结果无法反映真实的测量空间流场分布。因此,测量方案采用传感器支架,搭载一定数量的风速传感器和三维移动平台,通过移动扫描测量方式来采集各个空间点的风速。

图1 测量空间、测量点及传感器分布图(a)测量空间测量点网格划分 (b)H型支架 (c)风速传感器角度Figure 1.Measurement space,points and sensor distribution map(a)Meshing of measurement points (b)H style stand (c)Wind speed sensor angle
测量空间网格点划分如图1(a)所示,图中圆点为测量位置点。传感器支架如图1(b)所示,呈H型,共8个端点(见图中A~H位置)。每个端点上呈垂直角度布置2个热球式风速仪,如图1(c)所示。这里需要考虑风向的因素,根据测试要求,风速传感器选择TSI 的全向热球式风速传感器。虽然是全向传感器,但实际上热球式也有一定的方向性。由于测试环境内各个点的风向是不确定的,传感器的布置和测量数据处理方法对保证风速测量的准确性至关重要。
测量以单个截面为单位,依次对每个截面进行扫描测量。图2为单个测量截面中传感器选择测量点的示意图。如图2(a)所示,传感器节点A~D在该截面内。测量根据就近原则,单个传感器节点选择离它最近的位置点测量,例如传感器顶点D测量第1个测量点。本文规定先在垂直方向测量,下一个测量位置是测量点2,对该点的测量可以由传感器节点A或D来进行。如图2(b)所示,节点A距离该点最近。此外,还需要判断传感器支架向下运行是否有限位,例如在临近地板的测量点。如果支架往下移动,可能会触碰到垂直方向下方的限位挡板。因此,如果传感器节点A不受限位条件限制,则测量点2由节点A测量,否则由节点D测量,如图2(c)所示。

图2 测量截面网格点及测量过程示意图(a)测量位置1 (b)测量位置2 (c)测量位置3Figure 2.Schematic diagram of measurement section grid points and measurement process(a)Positon 1 (b)Positon 2 (c)Positon 3
本研究通过机电控制系统和上位机软件系统采集测量点的移动和数据。机电系统的主要功能是通过控制电机驱动该传感器支架平台做三维移动至各个测量点进行测量。16只风速传感器的测量值由上位机软件系统读取和处理。
2 微风速多传感器数据融合方法
2.1 相关函数
对多个风速传感器测量同一个坐标测点的风速数据,记第i个传感器和第j个传感器测得的数据分别为Yi和Yj,均服从高斯分布。以它们的概率分布函数作为传感器的特征函数,记成pi(y),pj(y)。yi、yj分别为Yi和Yj的一次观测值。为评估yi和yj之间偏差程度,计算两者之间的置信距离测度dij[12]
(1)
同理,yj和yi之间的偏差程度置信距离测度dij为
(2)
根据测量误差概率积分函数Φ(t)计算上述置信测度dij和dji[9]。
(3)
(4)
n个风速传感器测量同一个坐标测点的风速数据,置信距离测度dij(i,j=1,2,…,n)构成多个风速传感器数据的置信距离矩阵Dn,如式(5)所示。
(5)
根据上述定义,dij值为概率密度函数是正态分布的两个测量值[yi,yj]范围内的积分,0≤dij≤1。该值越小说明第i个风速传感器与第j个风速传感器测量输出越接近,第j个传感器对第i个传感器的支持程度越高。为消除传感器的无效数据和多个传感器数据的融合,根据模糊理论中的相关性函数定义,可令
f(i|j)=1-dij,i,j=1,2,…,n
(6)
相关性函数f(i|j)的大小表示传感器i被传感器j支持的程度,相关性函数定义为
(7)
构造由f(i|j)值组成的矩阵J,其为方阵且秩为n,i,j=1,2…,n。
若f(i|j)=1,则认为第i个风速传感器与第j个风速传感器相融性好,称第i个风速传感器支持第j个风速传感器。若f(i|j)=f(j|i)=1,称第i个风速传感器与第j个风速传感器互相支持。如果一个风速传感器被一组风速传感器所支持,则这个传感器的读数是有效的。若一个风速传感器不被其它风速传感器所支持,或只被少数的风速传感器所支持,则这个风速传感器的读数是无效的,进行数据融合时,需删掉该数据,保证数据有效性的客观判断。
为确定每个风速传感器被其它传感器支持的程度,令
(8)
传感器支持度矩阵Ji给出了第i个风速传感器被其它风速传感器支持的程度。通过计算处理排除掉支持度为0或支持程度低的传感器数据,得到最终的多个传感器的有效测量数据。
2.2 基于Kalman滤波算法的多传感器数据融合
设有m个风速传感器,通过风洞标定的每个传感器风速数据Yk=(y1,y2,…,yk),对m个风速传感器风速数据进行融合。当前时刻m个风速传感器测量数据为Yk,m=(yk,1,yk,2,…,yk,m)。随机噪声和测量噪声取高斯噪声,随机噪声和测量噪声协方差分别为Qk,m和Rk,m。用Xk,n|j表示根据j时刻及j以前时刻的传感器测量值对k时刻状态Xk,n的估计值,得出n个估计输出,即可得到风速传感器数据融合的Kalman滤波方程[13],具体过程如下:
首先估计状态的更新,Φk,n|k-1为状态转移矩阵。
(9)
多次更新之后得到最终的估计数据Xk,n
(10)
式中,εk,n为每次状态更新产生的信息[14-15];Kk,n为增益矩阵;Hk,nm为n×m矩阵,其元素为风速测量数据。
(11)
(12)
最终得到估计方差矩阵Pk,n。Kk,n|k-1,n为预测方差矩阵[16-18]
Pk,n=(I-Kk,nHk,n)Pk,n|k-1,n
(13)
(14)
经过上述Kalman滤波方程融合之后得到新的预测融合传感器数据输出
(15)
融合后,最终估计方差Pk,n=(Pk,1,Pk,n,Pk,2,…,Pk,n)。
3 测量实验与结果
3.1 风洞数据测试
为验证上述数据相关性判断和融合方法,选取3只相同型号的风速传感器在风洞中进行实验。本文所使用的传感器型号为TSI 公司的热球式8475型传感器。该传感器主要特点为:(1)全向探头尖端;(2)精确测量风速范围0.05~2 m·s-1;(3)适合未知或不同的流向,输出为4~20 mA信号。
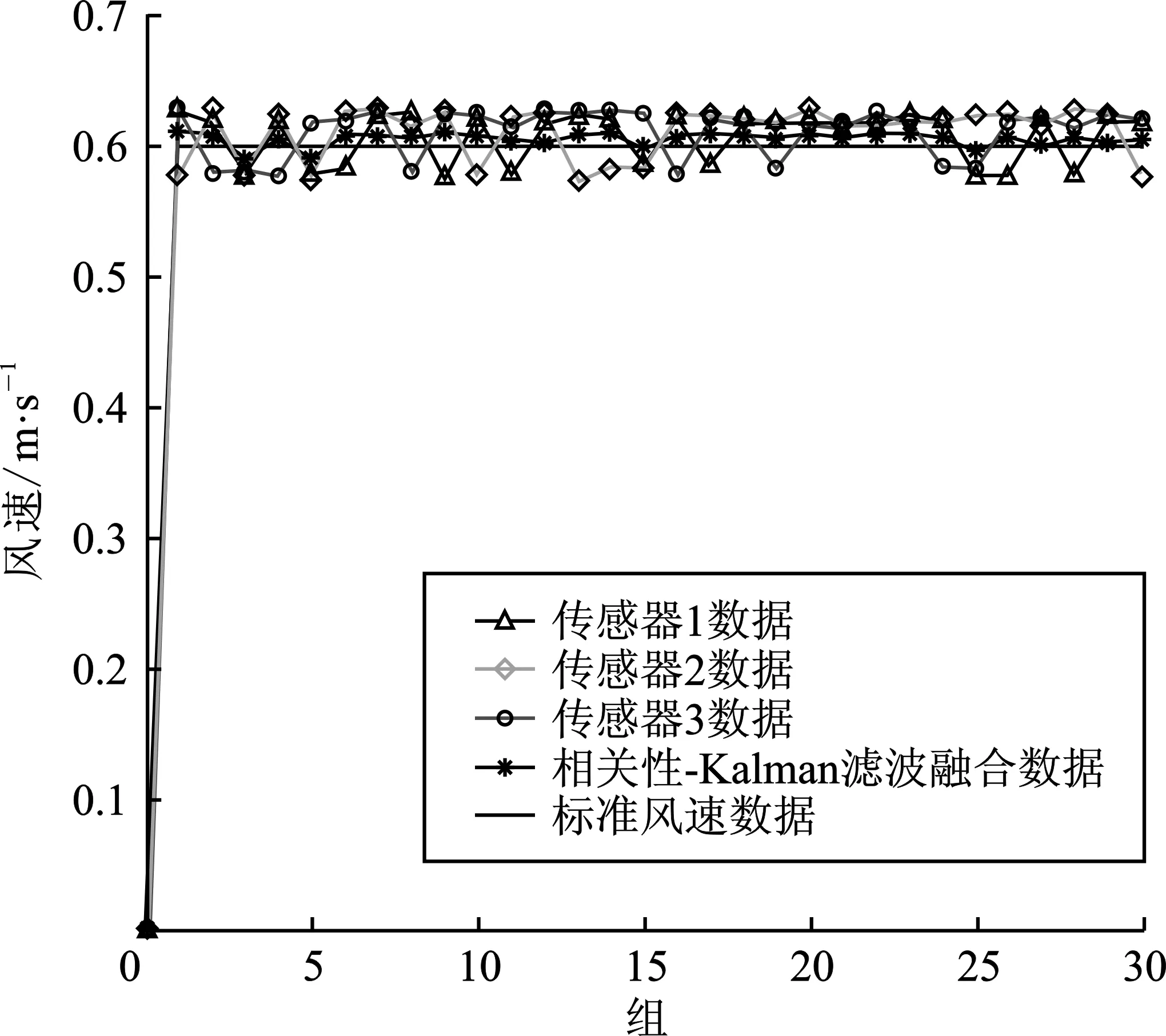
设定风洞理论风速0.6 m·s-1作为标准风速数据。每个风速传感器在该标准风速下同时采集10组,每组10个数据。3个传感器得到30组测点的风速数据。以30组测点风速数据作为样本,先对风速数据进行相关性判定,剔除部分无效数据点和支持程度低的传感器数据点,再对余下的有效数据点运用上述Kalman滤波方法进行数据融合。融合后数据的风速对比和数据均方根误差(Root Mean Square Error,RMSE)对比结果如图3(a)和图3(b)所示。
(a)
风洞实验数据表明,数据经过相关性判断和融合后,给出的测量值更接近真实值。图3表明融合后的测量值误差更小。
3.2 三维空间流场测量实验
上述传感器风洞测量数据融合验证了多传感器测量数据融合的有效性,下文将进行三维空间的流场测量实验。本研究中封闭空间大小(x×y×z)为5 000 mm×1 700 mm×1 800 mm,测量系统结构示意图如图4所示。该系统由便携式工业PC、风速传感器阵列、三维移动测量平台及其H型支架、导轨和信号与电源箱及拖链电缆等主要部分组成。16只风速传感器阵列布置在H型支架上,搭载于三维移动测量平台上,随平台三维移动。

图4 测量系统示意图Figure 4.Schematic diagram of measurement system
图4中的每个传感器节点由上述两个呈垂直角度布置的两个热球式风速8475型传感器组成,风速传感器如图5所示。电源箱内布放两个24 VDC电源,分别为所有传感器和3个步进电机供电。信号线缆和电源电缆置于拖链内,当测量平台移动时,拖链保证了线缆的拉伸不受损坏。测量平台每次移动到测量点,为了消除平台移动导致的气流扰动,在每个测量点平台都要停留若干秒钟,该值可以在软件系统中调整。

图5 8475型低风速传感器Figure 5.The 8475 type low wind speed sensor
测量过程中,风速传感器位置移动如前所述,传感器阵列共16只传感器,分别布置在A~H共8个位置上,为8个节点。如图1(b)所示,每个节点上有两个传感器,传感器编号S={s1,…,si,…,s16}。
测量步骤如下:(1)对每个测量网格点p,距离最近的传感器i移动至点p,读取传感器节点i的两个测量值si和si+1,1≤i≤16,该点的传感器数据支持矩阵J由si和si+1决定;(2)根据传感器支持度判断该两个传感器是否互相支持,如果si和si+1相互支持,则由si和si+1融合得到该点的风速值;如果两个传感器相互不支持,则由其它7个传感器节点中距离点p最近且满足运动至该点条件的一个传感器节点运动至点p。设该节点为j,其测量数据为si和si+1,1≤i≤16,这里j≠i。该点的传感器数据支持矩阵J由si、si+1、sj、sj+1决定。如果si、si+1、sj、sj+1这4个传感器值相互不被支持的传感器超过2个,则再由其它6个传感器节点中最近的而且满足运动条件的一个传感器节点加入测量。这样该点的传感器数据支持矩阵J由6个传感器数据决定。以此类推,同一个测量点的测量至少被测量2次,最多可以16次,即16只传感器全部加入测量;(3)根据传感器数据支持矩阵J,接下来对测量数据进行判断,排除无效数据,然后对有效数据进行融合,给出测量点的最终风速值。
测量系统对测量空间进行了扫描测量,以X方向间隔为200 mm,测得10个yoz截面的风速数据,如图6(a)所示。x=450 mm,x=850 mm,x=1 250 mm处3个yoz截面风速流场如图6(b)~图6(d)所示。

(a)
由于测量空间大,空间网格测量点数量较多,如果每个网格点都采用8个传感器节点和16个传感器进行测量,会大幅度延长总测量时间。在实际测量中,大部分测量点的测量次数为2~4次。这种测量方式还可以较快发现某个传感器的故障,及时将其屏蔽,使其不参与测量。
4 结束语
为满足某特殊装备的舱内低风速流场测量精度的要求,本文研究了基于接触式测量的多传感器测量数据融合方法。针对风速传感器阵列的测量数据处理,提出一种基于相关性函数-卡尔曼滤波算法的多传感器数据融合算法,对多个传感器的测量数据,运用相关性判定方法,排除测量数据中的异常数据和无效数据;把传感器标定输出数据和方差作为卡尔曼滤波的初始预估值和初始方差估计,进行多传感器数据的融合。与普通传感器标定的数据相比,该方法融合得到的风速数据测量误差更小。测量数据融合实验结果表明,该方法能有效提高测量精度,基于该数据处理方法的三维空间流场测量结果准确可靠。
猜你喜欢
航空学报(2022年5期)2022-07-04
海洋通报(2020年5期)2021-01-14
模具制造(2019年10期)2020-01-06
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
海洋信息技术与应用(2017年2期)2017-06-21
西南交通大学学报(2016年4期)2016-06-15
汽车实用技术(2015年8期)2015-12-26
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
电测与仪表(2015年8期)2015-04-09