换枪盘解锁系统闭环控制在汽车制造中的应用分析
2021-12-02 05:04潘状
科学与生活 2021年25期
关键词:闭环控制
潘状
摘要:在工業4.0时代,随着我国越来越多的工业机器人取代人类工作。不仅降低生产劳动力成本,而且提高产品的品质,因此得到广泛推广。为了稳定机器人系统实现切换不同的工具头,达到多个工序的完成。机器人换枪盘得到普及应用。然而机器人为了实现多个工序需要切换不同的工具,怎样才能实现快速、安全、可靠、简单对接系统的闭环控制呢,本文由此展开。
关键词:工具头;切换;对接系统;闭环控制
1.概述
在汽车工厂中很多自动化设备,在自动控制程序里都是通过硬件和软件的输出、输入信号实现闭环控制。然而一汽大众成都工厂使用的新式STAUBLI换枪盘在解锁系统中没有形成一个完整闭环控制,给生产、维护带来极大的影响。为了消除该影响开展了研究和改进方案。
2.换枪盘在汽车制造中的应用现状
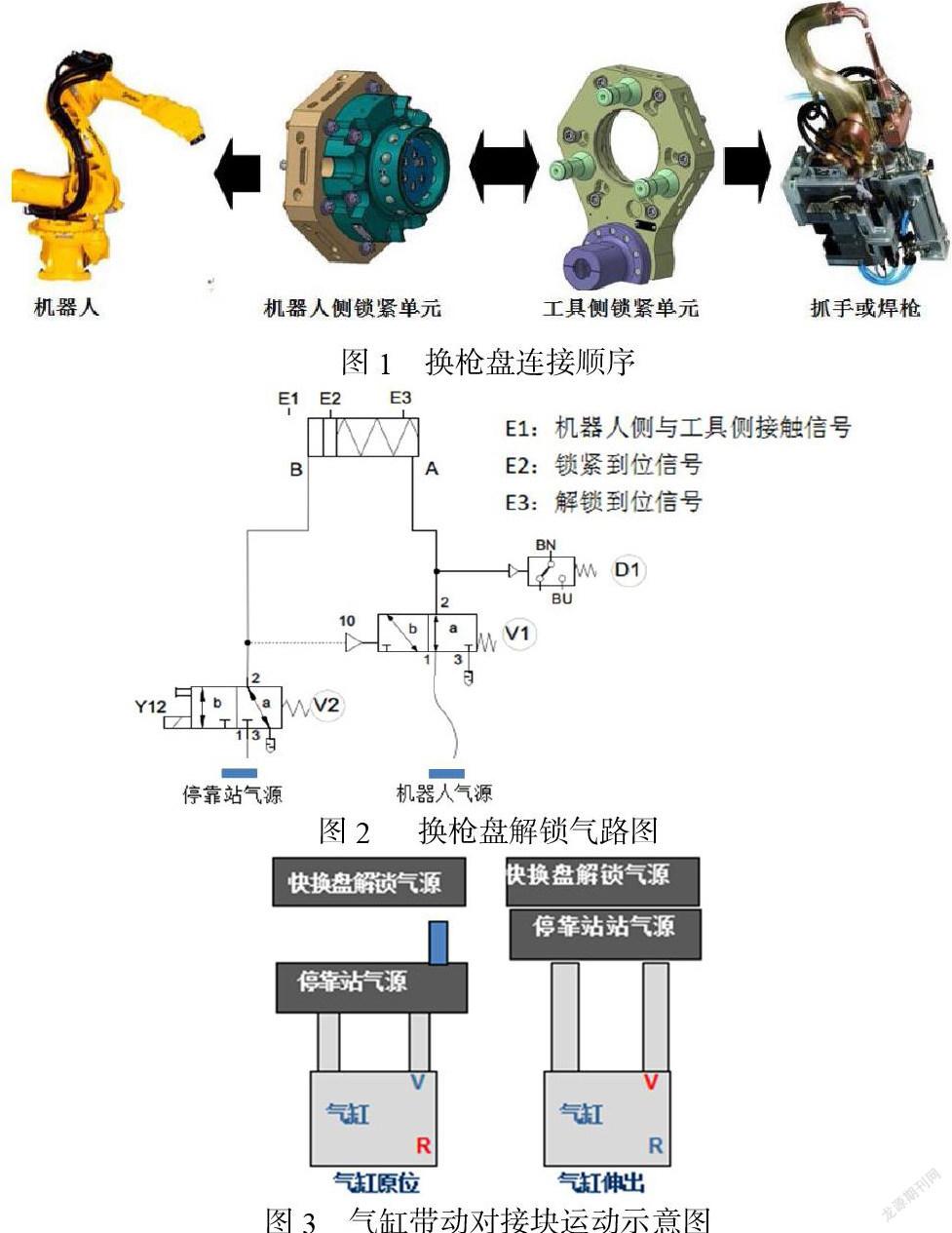
换枪盘是工业机器人用来切换不同工具(抓手、焊枪等)的装置,主要应用于汽车制造领域。具体包含:(1)机器人侧换枪盘及其周边模块,作用:安装于机器人第六轴及其连接机器人管线包内的信号、能源、流体介质等线路 。(2)工具侧换枪盘及其周边模块,作用:安装在工具(抓手、焊枪等)上及其连接工具(抓手、焊枪等)所需要的信号、能源、体介质线路。 通过换枪盘来满足不同车型的切换从而降低汽车制造的成本。
3.换枪盘功能演示如下:
4.换枪盘的解锁对接的闭环控制技术
4.1向停靠站存放抓手
当机器人到达停靠站后,通过停靠站上检测开关检测到抓手到位信号反馈给机器人。执行气缸伸出带动停靠站上的气源模块与抓手上的模块实现对接。机器人收到气缸的V位信号时。执行换枪盘解锁发出信号使得V2换向阀Y12得到高电平换向(见图2)。气源通过V2换向阀1口进入2流出,分支两路一路进去V1左边10口使V1换向。另一路进去换枪盘B腔使活塞向右运动,换枪盘A腔气体经过V1流出。当E3检测到活塞运动到最右端时反馈给机器人,机器人离开停靠站实现解锁,使得机器人侧与工具侧分开。
4.2向停靠站取抓手
当机器人侧达到停靠站停留的工具侧之前,执行气缸伸出带动停靠站上的气源模块与抓手上的模块实现对接。机器人收到气缸的V位信号时。执行换枪盘解锁发出信号使得V2换向阀Y12得到高电平换向(见图2)。气源通过V2换向阀1口进入2流出,分支两路一路进去V1左边10口使V1换向。另一路进去换枪盘B腔使活塞向右运动,换枪盘A腔气体经过V1流出。当活塞运动到最右端时E3检查到活塞信号时反馈给机器人,机器人实现解锁。机器人继续运动使机器人侧与工具侧相贴合。贴合后E1检测到工具侧的信号,执行换枪盘锁死信号使V2换向阀Y12失电在弹簧复位下换向。同时V1换向阀失去先导气情况下由弹簧复位。最终由机器人气源通过图3中V1换向阀从1口进入2流出,进入了换枪盘A腔。使活塞向左运动直到E2得到信号时实现锁死,同时机器人执行气缸返回带动停靠站上的气源模块与抓手上的模块实现脱开。当得到气缸返回R位信号时机器人带工具侧离开,实现取抓手过程。
5.换枪盘在汽车工业制造中的发展趋势
对工业制造行业来讲,现在在一步一步走向数字化转型。对于设备控制要求更精简、快捷、安全可靠。从机器人替代人工,再到一个机器人做2人及其多人以上的工作,都是通过换枪盘去执行。现在换枪盘通过气动技术控制,通过不断优化改进已经满足了安全可靠。未来将伺服驱动控制技术应用其中,不仅改善了环境污染。并且能带来能源的节约。
结束语
综上所述,在汽车行业中为了提高生产率、减少劳动力情况下。高效、准确、快速的自动化设备闭环控制系统是工厂的不可缺少的部分。在生产中不断总结、不断积累、不断的改进优化将设备的故障率降低最低,提高设备运行的可靠性。
参考文献
【1】韩建海.工业机器人(第二版)].华中科技大学出版社,2012.
【2】刘海萍.机械设计基础,苏州大学出版社,2014.
【3】左键民,韩屋谷.液压与气动技术第三版,机电工业出版社,2011.
【4】陈韶飞.发展工业机器人产业,促进制造业转型升级[J].黑龙江科技信息,2015.
猜你喜欢
纺织导报(2017年2期)2017-03-10
商情(2016年46期)2017-03-06
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
现代电子技术(2015年22期)2015-12-02
科技与创新(2015年20期)2015-10-29
哈尔滨理工大学学报(2015年1期)2015-06-23
科技与创新(2015年1期)2015-02-04