
基于代价敏感结构化SVM的目标跟踪
2021-12-02 10:14:56袁广林孙子文秦晓燕
电子与信息学报 2021年11期
袁广林 孙子文 秦晓燕 夏 良 朱 虹
(中国人民解放军陆军炮兵防空兵学院信息工程系 合肥 230031)
1 引言
目标跟踪是计算机视觉领域中的基础研究课题,它是视频分析中的一项重要技术,其目标是利用视频数据估计目标的状态。目标跟踪在视频监控、车辆导航、人机交互、智能交通、运动分析和姿态估计等民用领域,以及视觉制导、目标定位和火力控制等军事领域均有重要的应用价值。近年来,虽然目标跟踪有了较大发展,但是其仍然面临复杂背景、目标变化和快速运动等诸多难题,目前仍然是计算机视觉领域中研究的热点问题。
受到结构化SVM在目标检测中应用的启发,Hare等人[1]于2011年在ICCV上首次提出基于结构化SVM的目标跟踪方法Struck,2015年该文的扩展[2]发表在顶级国际期刊IEEE Transactions on Pattern Analysis and Machine Intelligence上。Struck把目标跟踪看作结构化学习问题,避免了传统判别式跟踪的中间分类环节,显著提高了目标跟踪的性能。为了适应目标的变化同时又不丢失目标的时间上下文信息,Yao等人[3]于2012年提出一种加权在线结构化SVM跟踪方法,进一步提升了结构化SVM跟踪的性能。为了提高遮挡与形变目标的跟踪性能,2013年,Yao等人[4]又以在线算法Pegasos为基础,提出一种在线结构化SVM用于目标跟踪。为了解决目标跟踪中存在的模型漂移问题,2012年Bai等人[5]提出一种在线拉普拉斯排序SVM跟踪。同样是为了应对模型漂移问题,Zhang等人[6]于2014年提出了MEEM跟踪,该方法以在线SVM作为基础跟踪建立专家组跟踪目标,取得了较好的效果。2015年Hong等人[7]利用在线SVM指导反向传播特定目标的CNN特征到输入层,进而建立特定目标的显著图跟踪目标,该方法建立的显著图保持了目标的空间结构,增强了目标跟踪的鲁棒性。2016年Ning等人[8]基于对偶坐标下降原理提出一种对偶线性结构化SVM目标跟踪方法,该方法保证了目标跟踪的鲁棒性,同时又提高了目标跟踪的速度。2017年Wang等人[9]提出LMCF跟踪,该方法利用相关滤波对基于结构化SVM的目标跟踪进行了加速。2018年Ji等人[10]采用了与LMCF跟踪类似的思想来加速基于目标部件的结构化SVM跟踪。2019年Zuo等人[11]提出一种基于离散傅里叶变换的交替优化方法求解相关滤波器,并设计了多通道支撑相关滤波器跟踪目标,进一步提升了基于SVM的目标跟踪的性能。
综上所述,基于结构化SVM的目标跟踪方法具有较优的跟踪性能,受到了广泛的关注,但是现有方法存在正样本和负样本不平衡的问题。针对基于结构化SVM的目标跟踪中存在的负样本和正样本不平衡的问题,本文提出一种代价敏感结构化SVM模型,基于对偶坐标优化原理设计了该模型的求解算法,并利用该算法实现了单尺度目标跟踪算法(Dual Liner Cost Sensitive Structured Support Machine, DLCS-SSVM)和多尺度目标跟踪方法(Scale Dual Liner Cost Sensitive Structured Support Machine, Scale-DLCS-SSVM)。利用OTB100数据集[12]和VOT2019数据集[13]对提出的目标跟踪方法进行了实验验证,并与现有的先进目标跟踪方法进行了比较。实验结果表明,本文提出的目标跟踪方法达到了预期的跟踪效果,与现有目标跟踪方法相比具有较好的性能。
2 代价敏感和结构化支持向量机
2.1 代价敏感支持向量机

w和b分别是SVM分类器的法向量和偏置,ξi是松弛变量,C, C1, C-1和κ是正则化参数。
2.2 结构化支持向量机

3 代价敏感结构化SVM
3.1 代价敏感结构化SVM模型
现有基于结构化SVM的目标跟踪方法存在正样本和负样本不平衡的问题。如图1所示,与目标重叠区域较大的训练样本称为正样本,与目标重叠区域较小的训练样本称为负样本。目标跟踪需要在当前目标周围区域中进行采样更新表观模型。从图1可以看出,在采样得到的样本中,负样本的数量远大于正样本的数量,即负样本与正样本严重不平衡。其中,黑色实线是非代价敏感结构化SVM的超平面,红色虚线是代价敏感结构化SVM的超平面。当训练数据集不平衡时,SVM分类器对少数类的识别率较低,因此该问题制约了目标跟踪的性能。为了解决正样本和负样本不平衡对基于结构化SVM目标跟踪方法性能的影响,本文将文献[14]的思想引入到文献[1]提出的结构化SVM中,设计一种基于代价敏感的结构化SVM模型,描述为

图1 结构化SVM目标跟踪中存在的正样本和负样本不平衡问题

3.2 代价敏感结构化SVM算法



在基于结构化SVM的目标跟踪中,随着时间的推移,结构化SVM中的支持向量的数量不断增加。为了保证目标跟踪的效率,需要固定支持向量的数目。为此,当结构化SVM中模式数超出预算时,根据式(23)选择一个支持向量删除,本文提出的代价敏感结构化SVM采用这一策略。

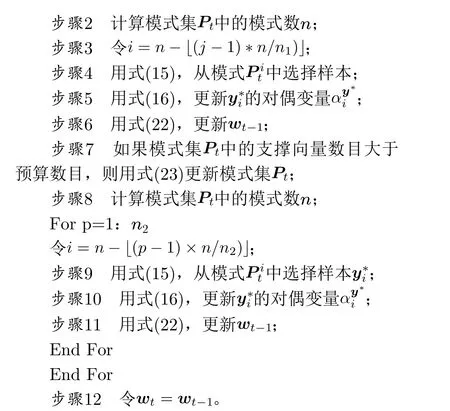
说明:算法1中n1和n2是外部循环和内循环的迭代次数,本文分别取5和10。
4 目标跟踪方法
本文使用网格搜索生成候选样本,搜索区域的大小由跟踪目标的大小自适应确定。样本的大小设定为20×20。在得到代价敏感结构化SVM的超平面w后,利用内积运算计算候选样本的得分,根据最大得分准则式(24)估计目标的状态。

对于目标特征,本文选择目标的Lab颜色和局部秩变换(Local Rank Transformation, LRT)特征,LRT特征的计算方法同文献[16],这里不再详述。基于上面的分析,本文提出的代价敏感结构化SVM目标跟踪方法描述如下。


方法1中It,k=Scale(It, Sp[k])的功能是利用尺度参数Sp[k]对图像It进行缩放,结果赋予It,k。对于单尺度目标跟踪,尺度参数Sp设定为{1},即可完成单尺度目标跟踪,称为单尺度代价敏感结构化SVM目标跟踪方法(简称DLCS_SSVM)。对于多尺度目标跟踪,尺度参数Sp={Sp[1], Sp[2], ···,Sp[n]},本文Sp={1, 0.995, 1.005},即在3种不同尺度图像上分别跟踪目标,以最大得分作为跟踪结果,即可完成多尺度目标跟踪,称为多尺度代价敏感结构化SVM目标跟踪(Scale-DLCS_SSVM)。
5 实验
5.1 实验环境、数据集和参数设置
在SYS-7048GR-TR台式机(CPU型号为Intel Xeon(R) ES-2630v4@2.20 GHz×20,内存为64 GB,GPU为RTX2080Ti 11 GB)上使用Matlab和OpenCV实现了本文提出的跟踪方法,其中Matlab版本为R2017a, OpenCV版本为2.4.8。一方面利用OTB100数据集[12]对提出的目标跟踪方法进行实验验证。评价指标为OPE, TRE和SRE[12]。另一方面利用VOT2019数据集[13]对提出的目标跟踪方法进行实验验证。评价指标为EAO, Accuracy,Robustness[13]。本文提出的目标跟踪方法中有一些需要设置参数,实验中这些参数固定不变。惩罚系数C的值为100,支持向量的预算设为100,C+的值设为2,κ的值设为0.67,正样本与负样本的阈值m设为0.5。多尺度估计参数设置为Scale={1,0.995, 1.005}。
5.2 实验结果及分析
5.2.1 与其它基于结构化SVM跟踪器在OTB100数据集上的比较
表1给出了本文方法DLCS_SSVM, Scale-DLCS_SSVM, DLSSVM[8], Scale-DLSSVM[8],Struck[1]和LMCF[9]等6种基于结构化SVM跟踪器在OTB100数据集上的OPE性能指标比较结果。从表1可以看出,在精度和成功率两项指标上,本文提出的方法Scale-DLCS_SSVM均明显优于其它跟踪器。在跟踪速度上,本文选择一个长视频liquor(1741帧)[12]进行评估。由表1中的比较结果可以看出:本文方法与DLSSVM[8]方法相比不仅在性能上有明显提升,而且对目标跟踪速度几乎没有影响。
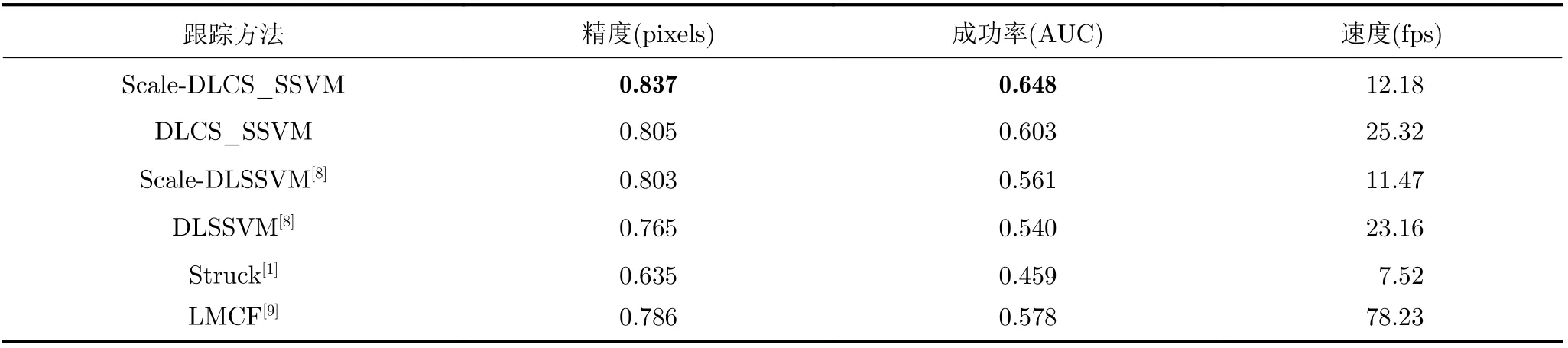
表1 6种基于结构化SVM的跟踪器在OTB100数据集上的OPE性能与速度指标
5.2.2 与其它高性能跟踪器跟踪速度比较
由表2与其他高性能跟踪器跟踪速度比较可知,相较于深度学习目标跟踪方法,如DeepLMCF[9]和DeepSRDCF[17],本文方法速度明显更快。相较于相关滤波目标跟踪方法,如TADT[18],本文单尺度方法速度与其速度相当,能够达到实时的跟踪效果。

表2 5种跟踪方法在OTB100数据集上的速度指标(fps)
5.2.3 与其它高性能跟踪器在OTB100数据集上的比较
在OTB100数据集上,将本文提出的目标跟踪方法与4种优秀的目标跟踪方法进行比较。4种方法分别是基于深度学习的DeepSRDCF[17]、基于相关滤波的Staple[19]、基于结构化SVM的多尺度跟踪Scale-DLSSVM[8]及基于结构化SVM与相关滤波的LMCF[9]。图2为6种跟踪器在OTB100数据集上取效果前5名的OPE, TRE和SRE性能指标曲线。从图2中的结果可以看出,本文提出的Scale-DLCS_SSVM与DLCS_SSVM跟踪器在准确度和成功率两个指标上相比Scale-DLSSVM跟踪方法都有明显的提高。且在OPE评价指标上Scale-DLCS_SSVM相比DeepSRDCF[17]在成功率上高1.3%,在TRE评价指标上Scale-DLCS_SSVM相比DeepSRDCF[17]在成功率上高1.5%,在SRE评价指标上Scale-DLCS_SSVM相比DeepSRDCF[17]在成功率上高1.0%。
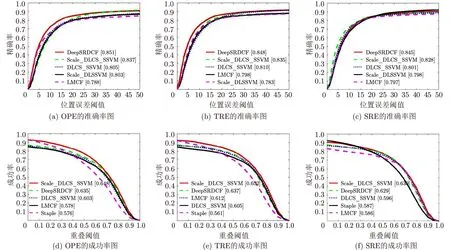
图2 6种高性能跟踪器在OTB100数据集上取效果前5名的OPE, TRE和SRE性能指标曲线
5.2.4 与其它高性能跟踪器在VOT2019数据集上的比较
如表3所示,本文选取近两年高性能的深度学习与相关滤波跟踪方法在VOT2019数据集上进行比较。由表3可知,本文多尺度方法在单个指标上略低于SiamMask,但是相较于其他高性能方法来说在各个性能上有着优势。

表3 本文多尺度方法与近年来4种高性能跟踪方法在VOT2019数据集上实验结果
从上述所有实验结果可以看出:本文提出的目标跟踪方法达到了预期的跟踪效果,其跟踪性能优于现有基于结构化SVM的目标跟踪方法;与相关滤波目标跟踪方法相比,本文方法跟踪精度较高;与深度学习目标跟踪方法相比,本文方法具有速度优势。
6 结束语
本文分析了基于结构化SVM的目标跟踪在进行训练时存在正样本和负样本不平衡的问题。针对该问题,基于代价敏感SVM和结构化SVM提出一种代价敏感结构化SVM模型,并利用对偶坐标下降优化设计了代价敏感结构化SVM算法。最后,利用提出的代价敏感结构化SVM实现了一种多尺度目标跟踪方法。利用OTB100数据集和VOT2019数据集分别对提出的目标跟踪方法进行了实验验证和分析。实验结果表明,与相关滤波目标跟踪中的一些优秀方法相比,本文方法跟踪精度较高,与深度目标跟踪中的一些优秀方法相比,本文方法具有速度优势。在目标跟踪中,由于跟踪误差会引起模型漂移,进而导致跟踪失败,如何利用结构化SVM解决这一问题是进一步研究的方向。
猜你喜欢
太阳能(2022年3期)2022-03-29 05:15:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:44
太阳能(2020年3期)2020-04-08 03:27:10
数学物理学报(2019年6期)2020-01-13 06:08:16
当代工人·精品C(2019年2期)2019-05-10 00:13:22
海峡姐妹(2017年12期)2018-01-31 02:12:22
数学物理学报(2017年5期)2017-11-23 07:51:31
计算机应用与软件(2017年7期)2017-08-12 15:45:55
作文与考试·初中版(2017年12期)2017-04-19 20:24:45
中学生(2015年12期)2015-03-01 03:43:53
