
基于面阵相机识别生成晶圆图谱的算法研究
2021-12-02 01:26:44袁晓春
电子工业专用设备 2021年5期
周 丹,霍 杰,袁晓春,崔 洁
(北京中电科电子装备有限公司,北京100176)
1 面阵相机定位原理
目前面阵相机的核心成像部件有两种[1]:一种是广泛使用的CCD(电荷藕合)元件;另一种是CMOS(互补金属氧化物半导体)器件。
这两种面阵相机最小感光单位都是像素单元,两者都是利用感光二极管进行光电转换,将图像转换为数字数据,并通过模数转换成数字信号将数据传输给计算机,借助计算机处理手段可以进行轮廓定位,反馈轮廓中心在像素阵列中像素位置(X,Y),如图1所示。

图1 特征点在像素中位置
在半导体设备领域,通常会通过标定运动机构坐标系与相机坐标系[2],来实现相机定位后运动机构补偿。补偿方法是:首先标定运动机构与相机位置关系,假定运动机构位置(CenterPosX,Center PosY)与相机中心点(CenterX,CenterY)位置重合。数码相机进行定位后得出目标中心在相机坐标系内位置(X,Y)。
在两个坐标系完全平行状态下,相机X向与Y向只在对应的运动坐标系X向和Y向上产生影响。两坐标系关系如图2所示。
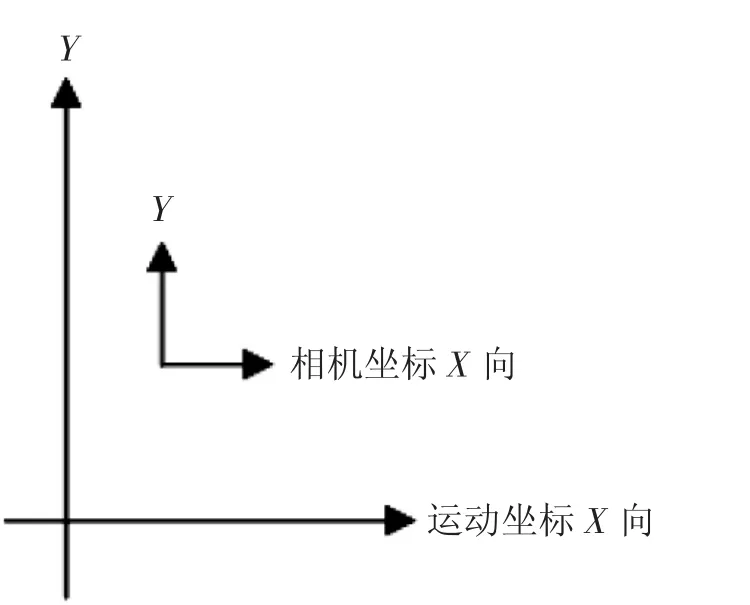
图2 运动坐标系与相机坐标系状态
运动机构坐标系与相机坐标系平行时,将相机坐标系内目标中心(X,Y)转换到运动机构坐标系内位置(TargetPosX,TargetPosY),其计算如公式(1)所示。

2 晶圆图谱
Wafer Map图包含整个晶圆中每个芯片的布局,如图3所示。它是将芯片的好与坏和芯片的其它测试状态信息反映到Map图中,在生产测试过程中,用Map图对所有芯片进行分类,分为合格的芯片和失效的芯片,设备按照Map图输入,就能自动完成操作,做到了生产线自动化,提高了效率。
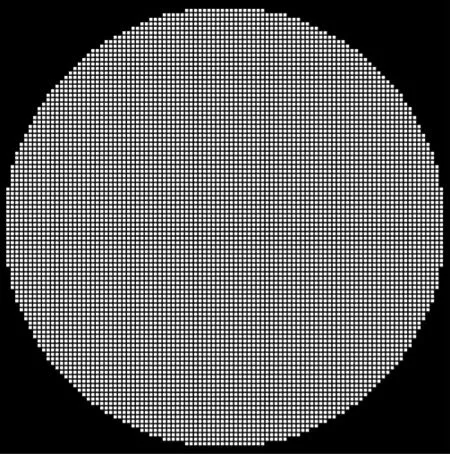
图3 Wafer Map图
3 全范围识别生成晶圆图谱算法
面阵相机的视场范围为10 mm×10 mm,描述一个直径为200 mm的晶圆,晶圆内部有部分MARK点,芯片大小为1 mm×1 mm,建立一个200 mm×200 mm的正方形范围,用黑色区域填充,将扫描到有效芯片的识别结果用空格方框表示,部分无效芯片及MARK点用实心方框表示,如图4所示。将10 mm×10 mm的相机从左到右依次扫描,每行扫描20次,共20行,全范围拼接,覆盖全部正方形范围。
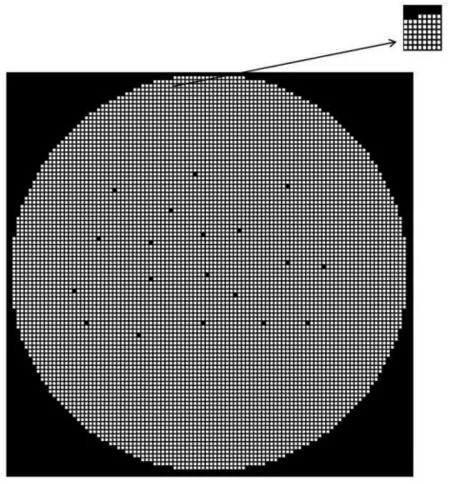
图4 200 mm×200 mm Wafer Map图
将每次扫描相机内识别结果计算为绝对坐标系,并通过绝对坐标系计算某颗芯片坐标点[3],相机扫描定位后得出芯片中心在相机坐标系内位置(TrsPosX,TrsPosY)。设运动机构位置(CoorPosX,CoorPosY),相 机 中 心 点 位 置 为(CenterX,CenterY),芯片大小为1 mm×1 mm,则步距为1 mm,可通过公式(2)计算出偏差值OffsetX,OffsetY,然后通过公式(3)计算出识别到的点在运动机构坐标系内位置(CurCoorX,CurCoorY)。根据计算出的识别结果填充该坐标点Map类型。
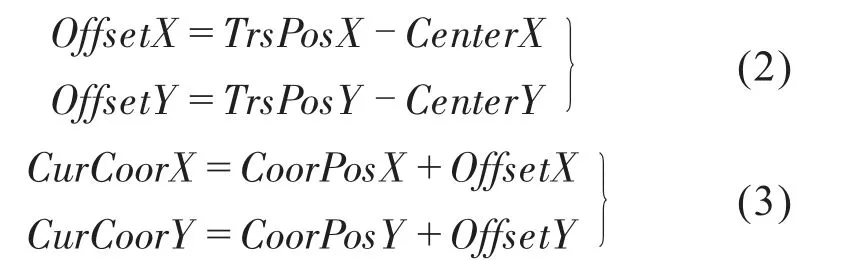
该方法可以完整扫描到整个Wafer中每一个芯片信息,如图4所示,空格方框为识别到的芯片,识别到的MARK点用实心方框标记。
4 边缘识别生成晶圆图谱算法
面阵相机的视场范围为10 mm×10 mm,芯片大小为1 mm×1 mm,该算法具体描述如下:
(1)建立一个200 mm×200 mm的正方形范围,用黑色区域填充,假定逻辑MAP为(100,100)为中心,半径为100 mm的圆;
(2)运动相机依次扫描每一行的最左端和最右端,每行扫描2次,共20行,每一行返回边缘两个点的坐标位置,将每次扫描到的边缘用实心三角框表示,如图5所示;
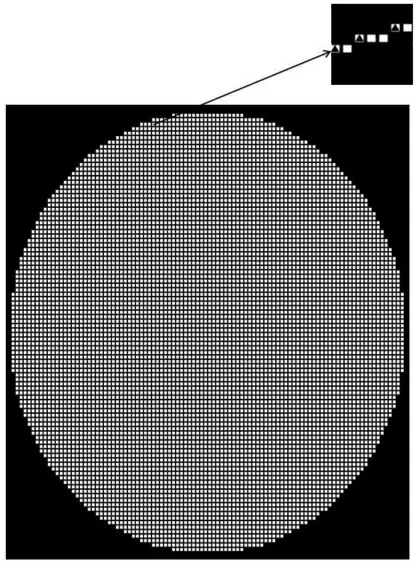
图5 边缘识别算法Wafer Map图
(3)将每行扫描结果中间区域填充为空格方框,认为是有效芯片。
该方法每行扫描2次,并根据识别结果填充该晶圆边缘部分,可以准确得出与实际边缘部分相符的晶圆MAP,减少了识别次数,大大提高了算法效率。
5 两种算法的执行效率与适用范围比较
假定面阵相机的视场范围为10 mm×10 mm,晶圆直径为200 mm,芯片大小为1 mm×1 mm,两种算法比较如表1所示。
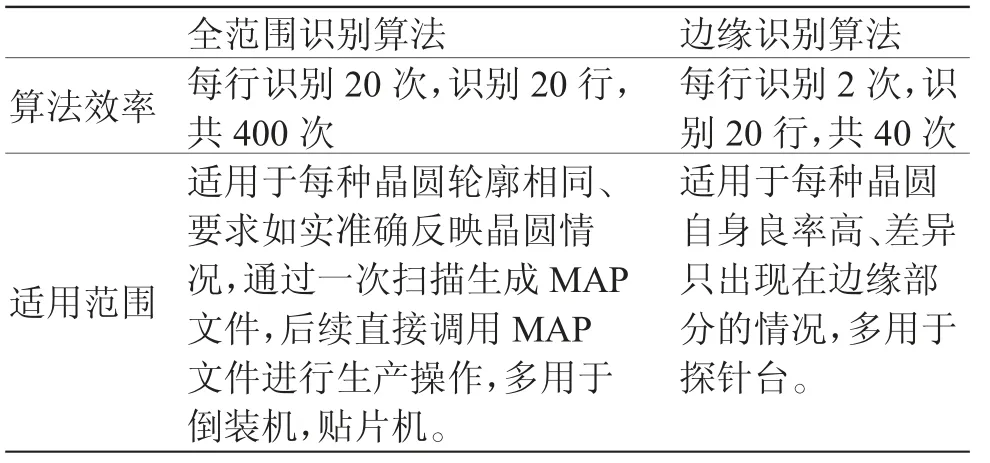
表1 两种算法比较
从表1可以看出,全范围识别算法可以如实反映整个晶圆情况,可应用于倒装机,贴片机等设备;边缘识别算法用时少,效率高,检测晶圆的边缘信息,内容采用逻辑填充,适用于晶圆自身良率高、差异只出现在边缘部分的情况,可应用于探针台等设备。
猜你喜欢
科学与信息化(2024年3期)2024-02-20 01:12:38
科学与信息化(2023年1期)2023-01-31 08:11:46
数学小灵通(1-2年级)(2022年12期)2022-12-23 05:38:18
数学小灵通(1-2年级)(2020年5期)2020-06-24 05:48:02
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:46
电子测试(2018年15期)2018-09-26 06:01:20
科学与财富(2018年20期)2018-08-22 19:35:16
数学小灵通(1-2年级)(2017年12期)2018-01-23 03:37:08
测绘科学与工程(2017年1期)2017-05-04 03:40:45
系统工程与电子技术(2016年2期)2016-04-16 05:16:51
