一种基于ADS-B IN的自主空中冲突探测方法
2021-11-30 04:22李恒,王浩
电讯技术 2021年11期
李 恒,王 浩
(中国民用航空总局第二研究所,成都 610041)
0 引 言
随着通航快速发展,对通航作业类型和作业量的需求日益增长,保障通航飞行安全是丰富通航作业类型和加快通航作业量增长的首要条件。为通航飞行员提供一种类似空中防撞系统(Traffic Collision Avoidance System,TCAS)的空中冲突告警是保障通航飞行安全最直接有效的办法。运输飞机的TCAS II在终端区附近的应用过程中暴露出了诸多问题[1-2],其原因是TCAS II冲突告警算法对高机动飞行的适应力不强,其高昂价格也不满足通航对低成本的要求。
近年来,广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)逐渐被引入到空中冲突探测研究中。文献[3-4]提出了TCAS与ADS-B的组合监视防撞,目的是扩展飞机空中冲突探测范围,减少TCAS询问与应答频繁而带来的射频干扰。但该研究方向的空中冲突预测模型中,TCAS仍然为必要数据源,ADS-B仅作为补充,因此其仅针对具备TCAS机载设备的运输飞机,并不适用于通航飞机。随着ADS-B广播能力在通航飞机的普及和ADS-B机载设备性能要求的规范,加之日渐成熟的“北斗”系统避免了由于全球定位系统(Global Positioning System,GPS)失效带来的安全隐患,基于ADS-B技术的低成本空中冲突告警机载设备成为可能。文献[5-6]提出了基于ADS-B单数据源的空中冲突探测方法,其研究成果主要为地面管制中心提供一种预先过滤无威胁飞机的方法。对于空中冲突探测模型,关键点在于对保护区域(Protected Airspace Zone,PAZ)和避碰区域(Collision Airspace Zone,CAZ)的定义。文献[5]对PAZ和CAZ的定义是依据国际民航组织(International Civil Aviation Organization,ICAO)对于空中交通管制(Air Traffic Control,ATC)使用ADS-B实施5 n mile的最小间隔要求。文献[6]依据航空器大小和飞行任务,将PAZ和CAZ定义为固定大小。这两种方式都不是针对通航机载自主空中冲突告警能力而设计的。另外,文献[5-6]均未涉及基于飞机预测轨迹的空中冲突探测。上述特点意味着,文献[5-6]所提及方法均不符合通航机载自主空中冲突告警对轨迹跟踪能力和冲突预测能力的要求。
航空无线电技术委员会(Radio Technical Commission for Aeronautics,RTCA)提供了一种基于ADS-B IN技术的空中冲突告警典型算法[7],其为通航机载设备使用ADS-B IN实现空中冲突探测提供了一种新的PAZ和CAZ定义方式。
作者基于ADS-B IN空中冲突告警典型算法,结合通航机载自主空中冲突探测实际要求和大量仿真场景测试经验积累,研究了一种符合通航作业实际需求的自主空中冲突探测方法,设计了一种性能评估平台,为本文所述空中冲突探测方法的设备可靠应用提供了保障手段。
1 自主空中冲突探测方法
自主空中冲突探测方法如图1所示,其将接收到的周围他机ADS-B信息与本机信息输入到入侵飞机粗选模块,入侵飞机粗选模块对两机的位置和速度进行卡尔曼滤波,并根据两机相对运动态势、距离、机载显示屏范围、他机地空状态等信息对入侵飞机进行一次粗选,目的是减少后面处理流程的压力,满足机载设备对高处理效率的要求。为了完成对冲突的提前探测,为飞行员预留足够的反应告警时间,采用自适应匀速率转弯模型对两机轨迹进行短期预测,利用改进的机载自主空中冲突模型对两机的预测轨迹进行冲突探测。为了保证探测结果发布的正确性,采用一种多重判定方法,对探测结果进行再次判定,最后将冲突探测结果发布到机载显示屏上,以图像和声音的方式对飞行员进行冲突告警。
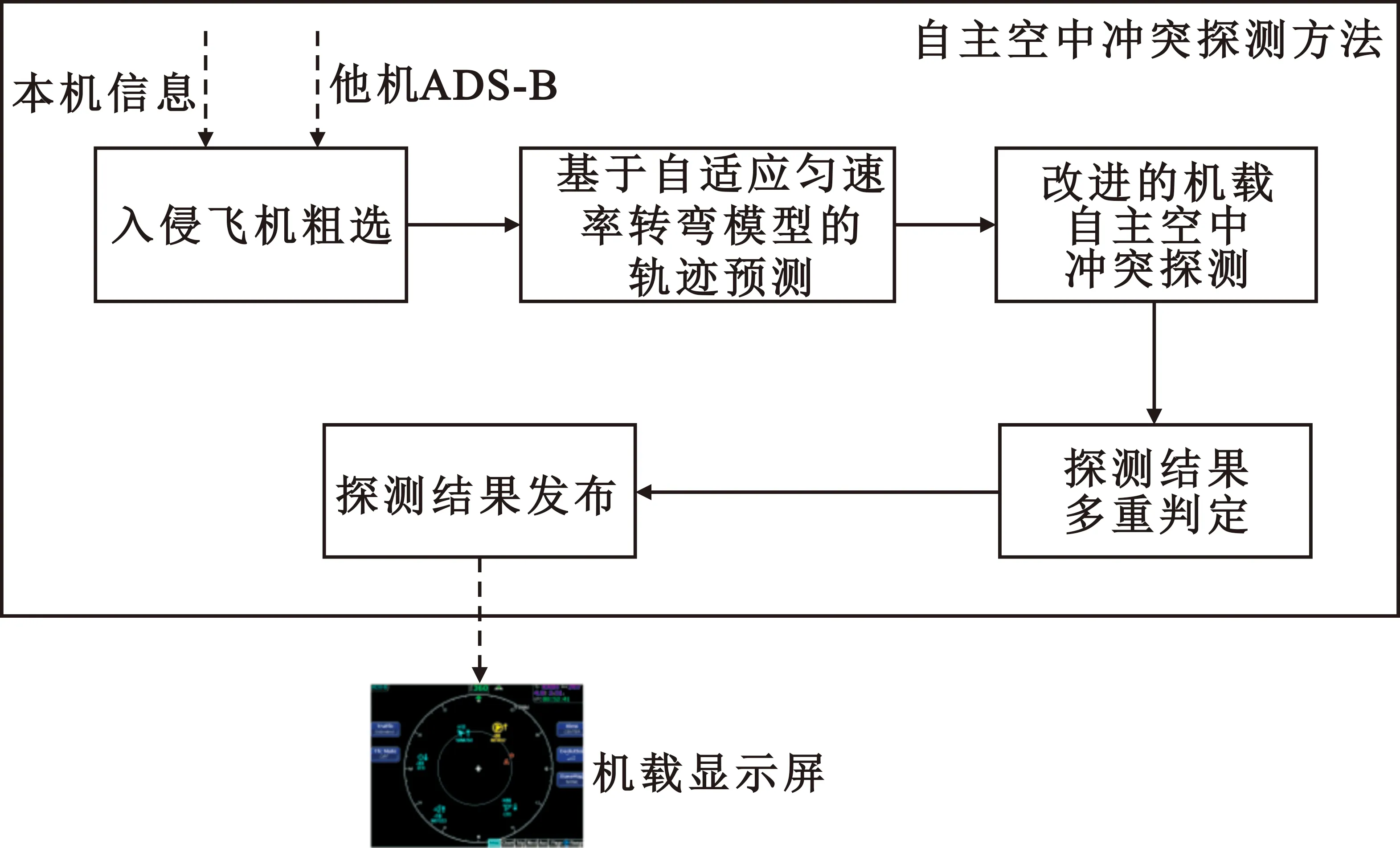
图1 自主空中冲突探测方法
1.1 基于自适应匀速率转弯模型的轨迹预测
轨迹预测的精度决定了冲突探测的正确性,本文所述轨迹预测方法是应用在通航机载设备上的短期轨迹预测。目前轨迹预测算法可以分为两种:基于卡尔曼滤波的无参数方法[8]和基于飞行器模型方法[9-10]。这两种方法各有优缺点:基于卡尔曼滤波的无参数方法只是单纯利用跟踪滤波算法进行轨迹预测,对于机动性强的通航,轨迹预测准确率不高;基于飞行器模型的轨迹预测方法需要大量的飞行器参数,然而获取这些参数的难度较大,缺失的参数会严重影响轨迹预测的准确性。本文所述的基于自适应匀速率转弯模型的轨迹预测方法既不需要大量的飞行器参数,又能灵敏跟踪飞行转弯速率的变化,从而保证轨迹预测能真实反映飞行器飞行轨迹。
首先设定一个点迹数量为3的窗区域,然后将窗分别在入侵飞机和本机点迹序列上按照指定步长进行滑动。基于ADS-B IN与GPS更新率为1 s且允许最大掉点数为2的原则,将滑窗取值成功的判定依据定为:窗内3个点迹到达时间(Time of Arrival,TOA)之差小于3 s,并且窗内最新点迹TOA与当前系统时间之差小于3 s。
然后,对于每一次滑窗取值成功的入侵飞机和本机,通过外推完成两机基于当前系统时间的TOA对齐,利用窗内TOA最新的两个点迹和对齐当前系统时间的外推点,计算最新转弯速率:
(1)

将噪声滤波器应用到估计的转弯速率中,以减少飞行路径中正常振荡引起的转弯速率抖动。
最后,基于匀速率转弯模型,完成入侵飞机和本机未来35 s的轨迹预测:
(2)
式中:k=1,2,…,35,α为飞机最新转弯速率,φ为航向角,v为水平速度,vz为垂直速度,dt为相邻位置的TOA差。
如图2所示,蓝色为飞机真实轨迹,红色为飞机预测轨迹,在飞机发生转弯机动时,本文所述预测方法在转弯速率跟踪上具有较好的灵敏性能,能快速将预测轨迹调整到与真实轨迹一致,说明了本文所述预测方法具有较好的自适应性。
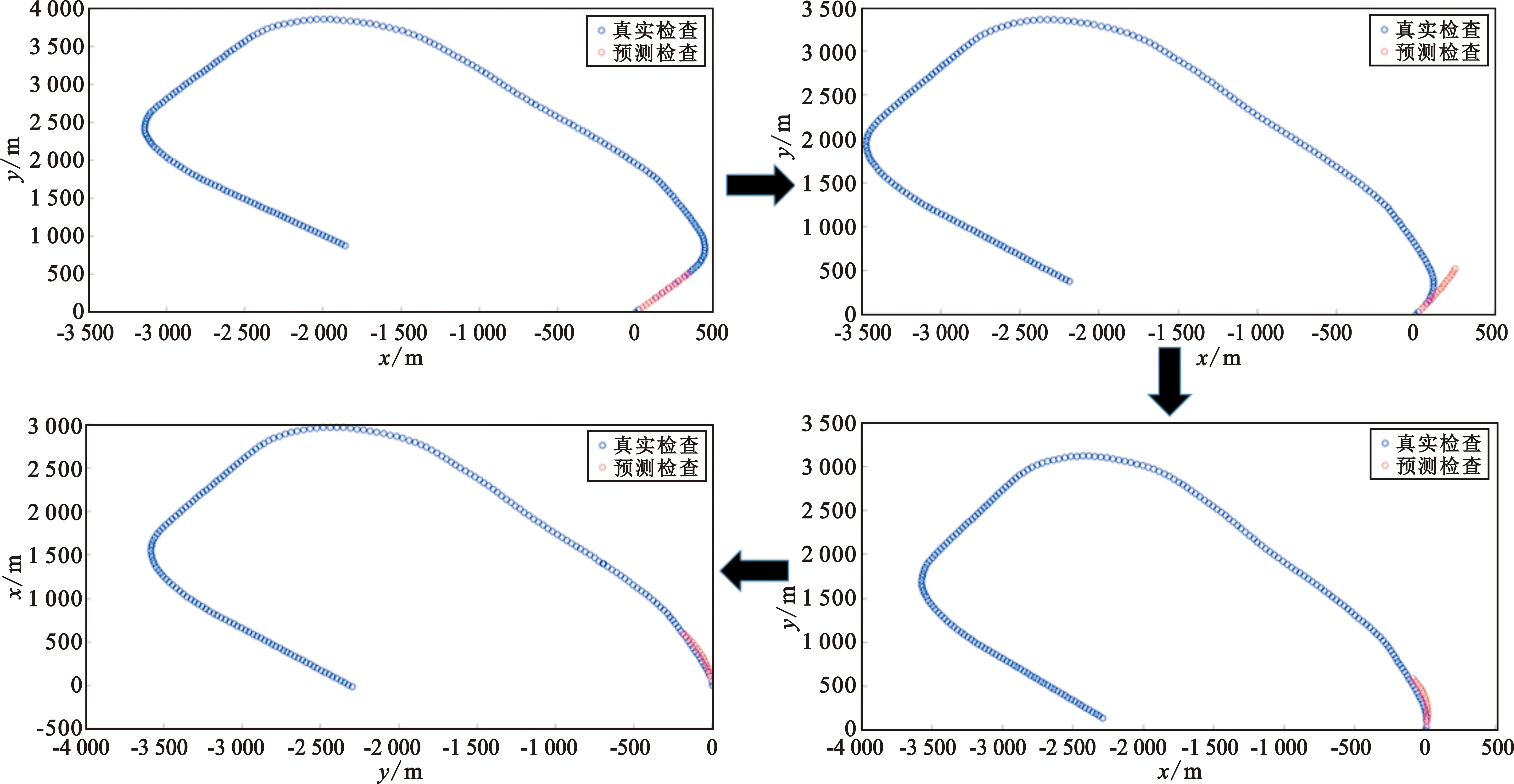
图2 本文所述轨迹预测方法对转弯的自适应效果
1.2 改进的机载自主空中冲突探测模型
ADS-B IN空中冲突告警典型算法基于PAZ和CAZ模型,PAZ和CAZ都是以入侵飞机质心为中心的虚拟圆柱体。如图3所示,将PAZ和CAZ圆柱体投影到二维平面,入侵飞机周围白色区域代表CAZ区域,黄色区域代表PAZ区域,两机随着位置的靠近,在t=30 s时刻,本机进入到入侵飞机的PAZ区域,发生PAZ告警。随着两机位置的继续靠近,本机进入到入侵飞机的CAZ区域,发生CAZ告警。
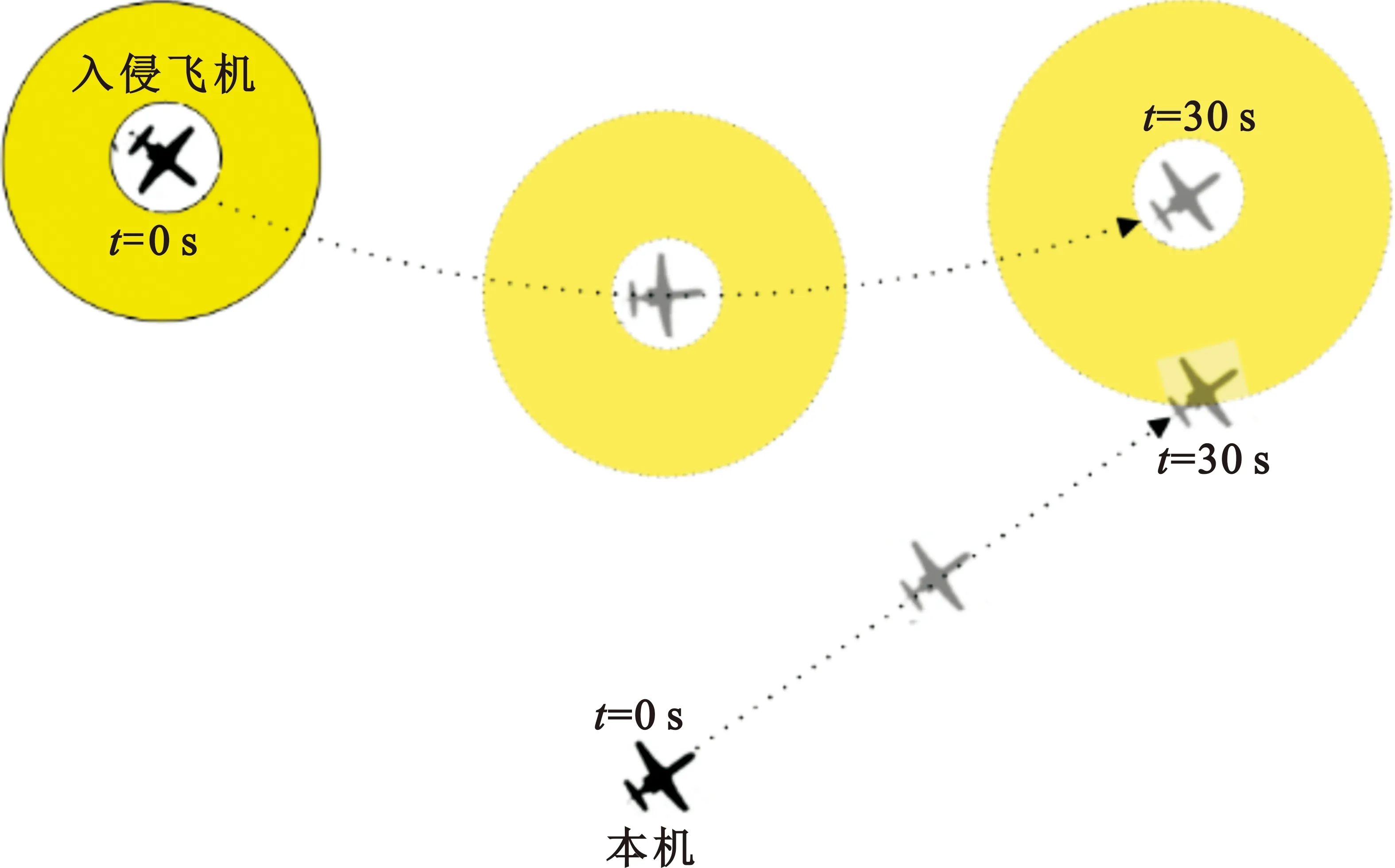
图3 PAZ和CAZ告警模型
ADS-B IN空中冲突告警典型算法中,CAZ圆柱体大小为固定值,并综合考虑了GPS精度、高度表精度、ADS-B信息精度、现存最大通用航空器等因素,将CAZ在垂直方向的间隔标准设置为±60.96 m(200 ft),将水平方向的间隔标准设置为152.4 m(500 ft)。同样根据通航机载空中冲突告警的实际要求,PAZ圆柱体大小被重新定义,其最小值来源于ADS-B IN空中冲突告警典型算法对终止告警的判定要求,即垂直方向的最小间隔标准为±137.16 m(450 ft),水平方向的最小间隔标准为228.6 m(750 ft),PAZ圆柱体大小随着入侵飞机与本机的接近程度而变化:
RPAZ=RPAZmin+tauPAZr×crh,
(3)
HPAZ=HPAZmin+tauPAZv×crv 。
(4)
式(3)中:RPAZ为入侵飞机和本机水平接近程度计算得到的PAZ水平方向间隔,RPAZmin为PAZ水平方向的最小间隔标准,tauPAZr为水平预留时间,crh为入侵飞机和本机的水平接近程度。式(4)中:HPAZ为入侵飞机和本机垂直接近程度计算得到的PAZ垂直方向间隔,HPAZmin为PAZ垂直方向的最小间隔标准,tauPAZv为垂直预留时间,crv为入侵飞机和本机的垂直接近程度。根据RTCA对ADS-B IN空中冲突告警典型算法为飞行员预留20~40 s反应告警时间的要求,并结合大量仿真冲突场景的测试,本文采取的方法中将tauPAZr和tauPAZv分别设置为20 s和10 s。
由此可见,PAZ的设定是为了提醒飞行员有飞机在向其靠近,并有可能继续靠近,为飞行员采取措施提供缓冲时间;CAZ的设定是为了防止飞机之间发生实际上的机身碰撞。PAZ告警判定的关键在于对入侵飞机与本机运动过程中的水平接近程度crh和垂直接近程度的crv跟踪。改进的机载自主空中冲突探测模型在crh跟踪模型和crv跟踪模型上都进行了新的定义。
改进的机载自主空中冲突探测模型的crh跟踪模型建立在:随着入侵飞机与本机在水平方向上接近程度的增加,PAZ圆柱体的水平方向间隔增大;反之,若入侵飞机与本机在水平方向呈远离趋势,PAZ圆柱体水平方向维持在最小间隔标准。
因此,首先需要判定入侵飞机与本机的相对运动态势[11]:
S=dx,i×Vrel,x,i+dy,i×Vrel,y,i。
(5)
式中:dx,i为第i时刻两机在x方向上的距离,Vrel,x,i为第i时刻两机在x方向上的速度差,dy,i为第i时刻两机在y方向上的距离,Vrel,y,i为第i时刻两机在y方向上的速度差。如果S大于零,代表两机相对运动态势是远离;S小于零,代表两机相对运动态势是接近;S等于零,代表两机相对静止。基于本文所述的crh跟踪原则,由式(5)可以推导出crh跟踪模型:
(6)
式中:crhi为第i时刻两机的水平接近程度。当两机相对运动态势是接近,则随着接近程度增加,crh值增大,PAZ圆柱体水平方向的间隔随之增大;当两机相对运动态势是远离或者相对静止,crh值维持为零,PAZ圆柱体水平方向维持在最小间隔标准。
改进的机载自主空中冲突探测模型的crv跟踪模型建立在:依据入侵飞机与本机在垂直方向的相对位置,若入侵飞机与本机在垂直方向呈接近趋势,crv则为两机在垂直方向上的速度差,随着接近程度的增加,PAZ圆柱体垂直方向的间隔增大;若入侵飞机与本机在垂直方向呈远离或相对静止,crv则维持为零,PAZ圆柱体垂直方向维持在最小间隔标准。
综上所述,本文所提改进的机载自主空中冲突探测模型对入侵飞机与本机相对运动态势跟踪的灵敏性更高,更加符合机动灵活性高的通航对告警时效性的要求。
1.3 探测结果多重判定方法
多重判定方法是建立在大量仿真冲突场景的测试结果分析下,针对轨迹预测误差随时间的增加而增大和转弯速率噪声对漏警的影响而设计的,是对上述空中冲突探测模型在实际使用中的补充。
多重判定方法的第一重判定是为了减少轨迹预测误差带来的虚警。根据2.2节的仿真测试结果,可得到结论:预测的35个轨迹点中,前15个预测轨迹点的可靠性较高。因此,若首个告警预测点是发生在前15个预测轨迹点中,则认为本次告警可靠,如图4(a)所示;若首个告警预测点是发生在后20个预测轨迹点中,则认为本次告警不可靠,如图4(b)所示,此时将启动双触发判定机制,即连续两次的告警都发生在后20个预测轨迹点中,即可发布本次告警。
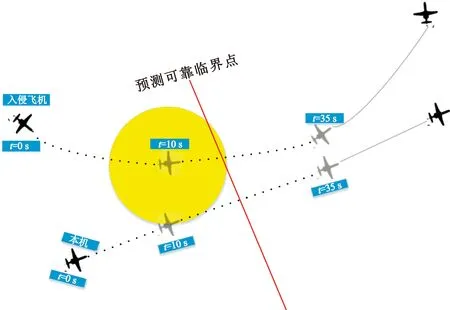
(a)首个告警预测发生在预测可靠临界点之前
多重判定方法的第二重判定是为了减少转弯速率噪声带来的漏警,即当两机当次预测结果是无告警时,若系统一段时间内对两机状态判断保持在告警且两机当前运动状态处于临近,则当次发布为告警。
2 性能评估与测试结果
2.1 性能评估平台
基于本文所述方法的机载设备属于航空新型机载设备,其应用前景广阔,但是,若该机载设备的可靠性得不到保障,会误导通航飞行员的判断与操作,反而会增加通航的空中飞行危险。一种新型机载设备的应用和推广需要一个快速、有效的性能评估平台对其进行正确评估。本文所述性能评估平台不仅可以用于机载设备初始适航取证时的性能检测,还能用于持续适航能力跟踪的性能监测。
性能评估平台如图5所示,其完成两个重要功能,分别是性能检测功能和性能监测功能。性能检测功能用于机载设备初始适航取证阶段,性能监测功能用于机载设备通过初始适航后使用过程中机载设备持续适航性的监测。
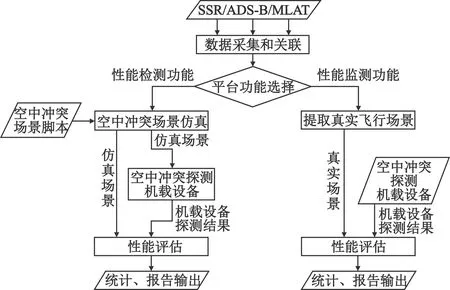
图5 性能评估平台功能图
影响空中冲突探测机载设备性能好坏的主要因素是对本机和他机飞机轨迹的预测准确性,所以,图5的性能评估平台采用一种事后分析的评估方法,如图6所示。基于本机和他机的真实飞行轨迹(如图5中的仿真场景、真实场景),根据航空器的运行区域特点,设置适当的危险区域(Hazard Zone,HAZ)和非危险区域(Non-Hazard Zone,HAZ′)大小,再将本机和他机的真实轨迹在时间上对齐,计算得到两机空间距离最近时间点(Closest Point of Approach,CPA)。若CPA落入HAZ内,则表明输入飞行场景存在冲突;若CPA落入HAZ′内,则表明输入飞行场景不存在冲突。最后与机载设备告警结果进行对比,分析得到正确率、误警率、漏警率、重复告警率、迟警率。通过大量飞行场景的输入,可以统计出空中冲突探测机载设备的性能报告。
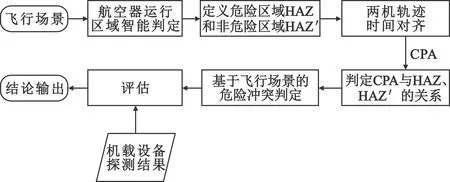
图6 性能评估方法
由于从传感器获取到的本机和他机的真实轨迹在时间上并不是完全同步的,甚至存在轨迹断点的情况,所以在进行CPA计算之前有必要采用一种高效算法将本机与他机的真实轨迹时间对齐,如图7所示。因为不同的传感器具有不同的位置信息更新率,所以对各类民航监视传感源特点加以分析和量化,得到一种自适应的时间对齐判定门限设置方法,根据监视源类型设置合适的时间对齐判定门限。另外,采用一种主动方主动查询的方式,在本机与他机重叠轨迹检测中找到本机和他机最适合作主动方的一方,利用单方驱动查询的方式减少遍历次数,从而提高CPA计算效率。
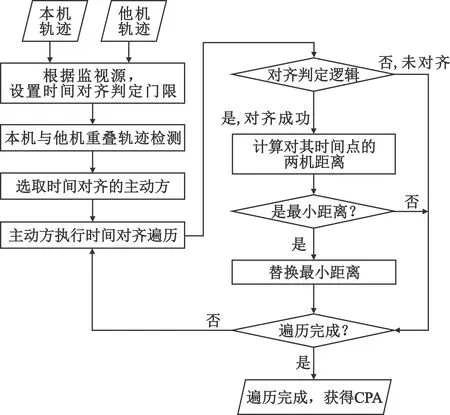
图7 航迹时间对齐算法
2.2 仿真测试与分析
目前,在空中冲突探测方法研究中,空中冲突场景的仿真主要有两种方法:一种是基于蒙特卡洛方法的单个位置点的冲突仿真[12],这种方法并非仿真入侵飞机与本机的存在潜在冲突的连续轨迹,而是仿真本机周围存在冲突的位置点,主要用于对本机周围其他飞机单次冲突位置判定的测试;一种是基于长期的、全覆盖的雷达数据采集,并在此基础上建立一个多种冲突类型的空域冲突模型,但由于对数据量要求较高,该方法实施难度较大。本文采用的仿真方法是,基于通航在低空飞行的冲突场景模型[7],利用蒙特卡洛方法随机生成飞机的初始位置、速度、航向角,最终仿真出入侵飞机与本机存在潜在冲突的连续轨迹。
本文主要对四种典型低空冲突场景测试结果进行分析,如图8所示。图8中,黄色圆圈是围绕入侵飞机质心的PAZ水平区域,红色圆圈是围绕入侵飞机质心的CAZ水平区域,绿色圆圈代表发生第一次PAZ告警,黑色圆圈代表发生第一次CAZ告警。可见四种仿真场景测试中,随着两机距离的接近,依次预测到PAZ告警和CAZ告警,并为飞行员提供的反应告警预留时间分别是36 s、17 s、34 s、29 s。其中仿真场景2的测试结果不符合RTCA关于为飞行员预留20~40 s反应告警时间的要求。对仿真场景2的分析结果是,在预测到第一次冲突后,本机出现的急转弯机动恰好加速了两机CPA的发生,从而造成首次告警与CPA的时间差小于20 s。但是在实际飞行中,当机载设备向飞行员提示冲突警告后,飞行员会立即建立起空中冲突情景意识,并做好避撞的机动准备。
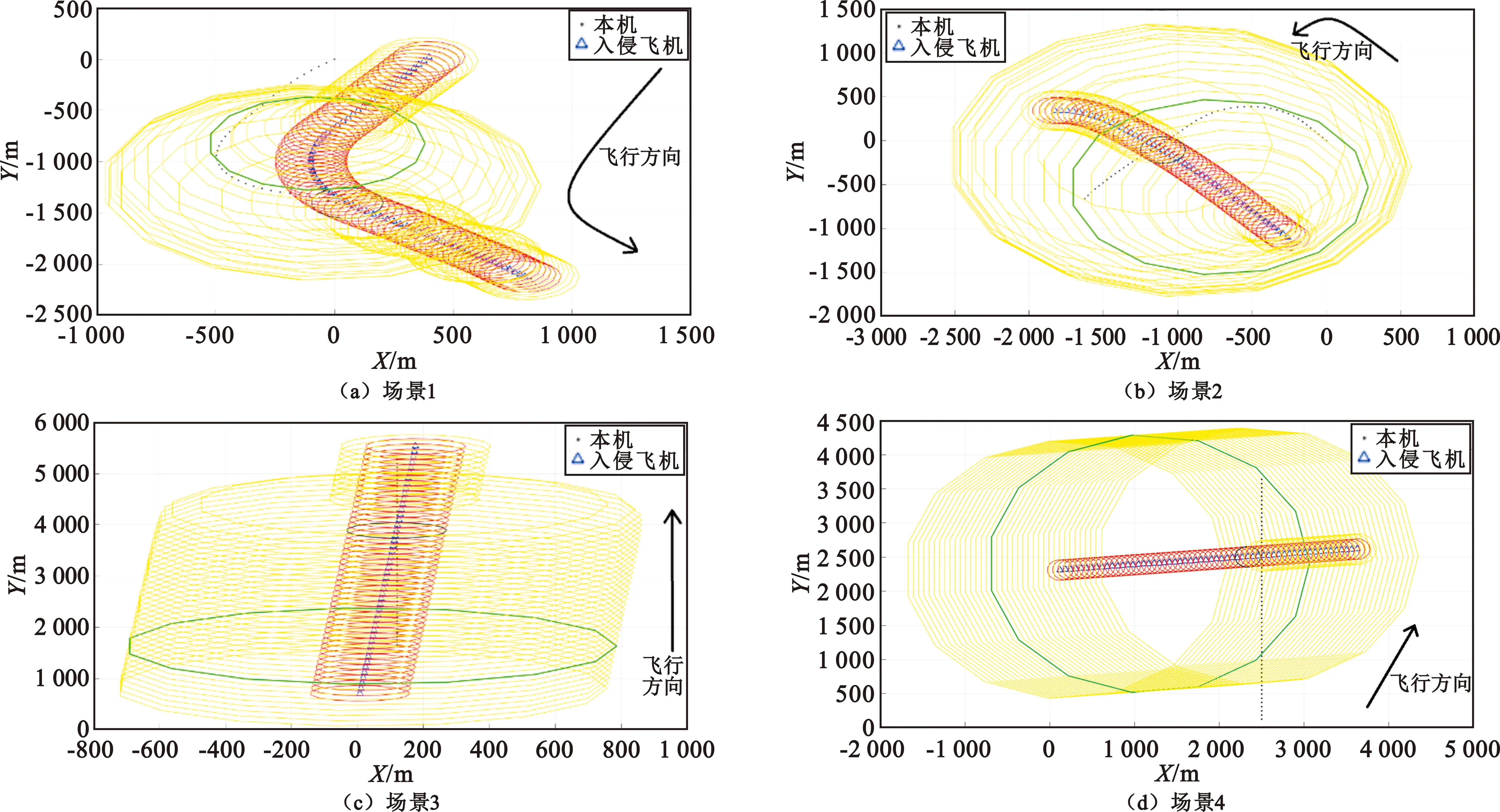
图8 四种典型低空冲突场景及测试结果
2.3 通航飞行测试与分析
目前,已经完成了基于本文所述空中冲突探测方法的通航机载原型机研制,并安装在两架通航飞机上,在某通航机场完成了飞行测试。飞行测试目的是检验该机载原型机在通航实际飞行中对空中冲突探测的正确性和即时性。飞行测试中两机采用目视飞行,处于后方的入侵飞机通过加速完成对前方飞机的追赶、临近、冲突、避让。
如图9所示,机载原型机为飞行员发出了连续的告警提醒,两机进行避让机动不久后,机载原型机停止告警提醒。如图10所示,首次告警与CPA的时间差较大,即为92.618 6 s,说明机载原型机为飞行员提供了足够的反应告警时间。由此可见,机载原型机在冲突发生前92 s便预测到了未来存在冲突危险,飞行员可以根据提前的告警提醒,感知到此时飞行轨迹存在潜在冲突,并根据机载显示屏上本机与周围飞机信息的显示,提前完成机动避撞。
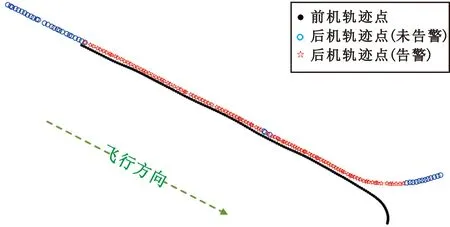
图9 告警正确性的飞行测试结果
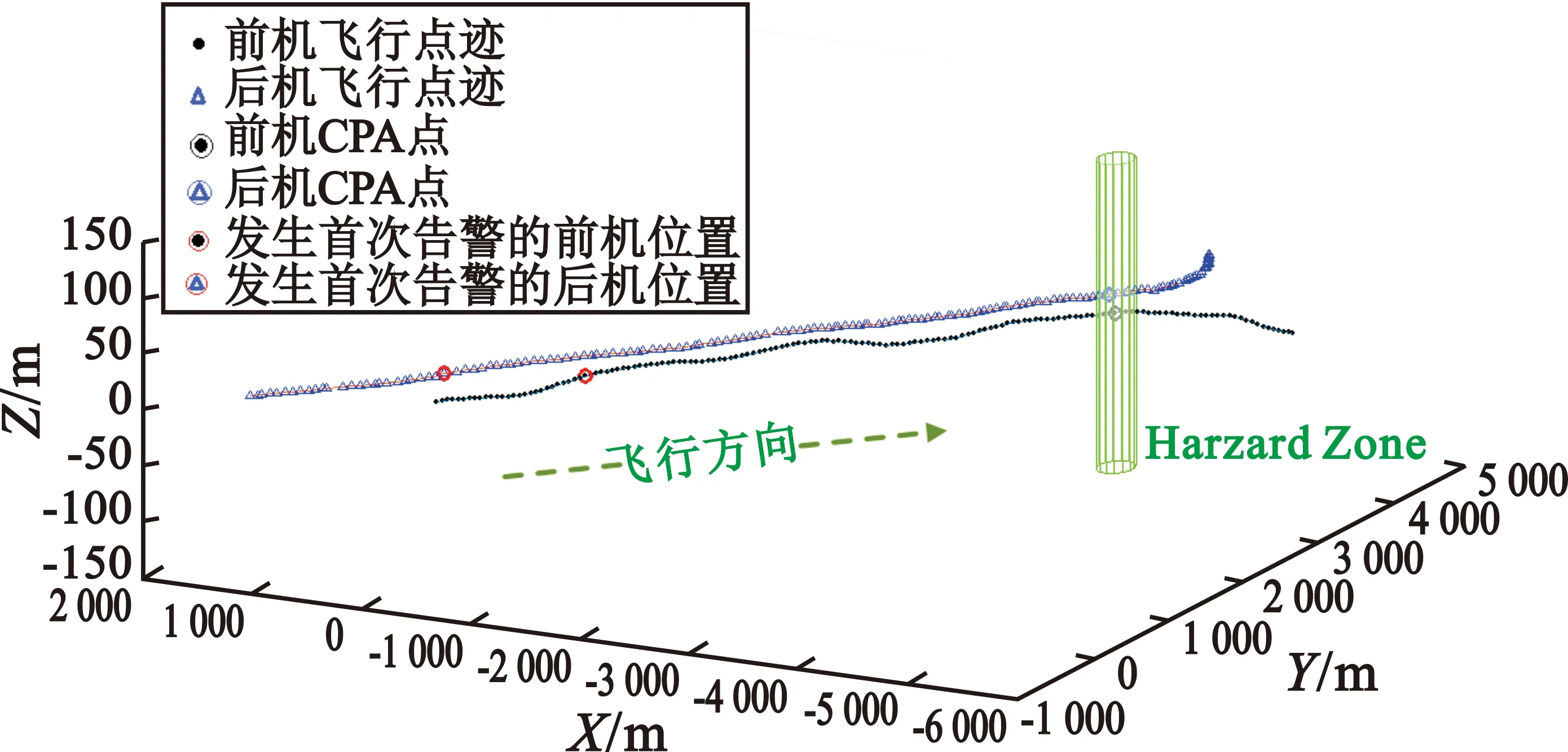
图10 告警即时性的飞行测试结果
但是注意到,图9中的告警过程出现了两次漏警,分析原因是,由于这两次的两机运动趋势判定结果为远离,PAZ圆柱体大小恢复到最小值,导致触发PAZ告警失败。由此可见,两机运动趋势的正确判定,不仅决定了PAZ圆柱体的大小,还决定了多重判定方法中对漏警的减少率。本文采取的两机运动趋势判定方法是离散型的,在振荡较强的通航目视飞行中,判定的运动趋势抖动较大。下一步工作需要采集更多通航目视飞行数据,对飞行的运动趋势离散特点进行分析和仿真,完成对运动趋势的滤波和平滑处理。
3 结束语
本文针对通航飞机机载缺少自主空中冲突探测能力的问题,在ADS-B IN空中冲突告警典型算法基础上提出了一种改进的自主空中冲突探测方法,其中,自适应匀速率转弯模型轨迹预测和多重判定方法进一步保障了冲突预测的准确性和即时性。分别采用仿真测试以及通航飞行测试对本文所述方法进行测试验证,结果表明该方法能准确预测到飞行存在的潜在冲突风险,并为通航飞行员提供符合RTCA要求的反应告警时间。此外,该方法对于无人机的自主防撞也具有参考价值。目前,基于本文所述方法的机载原型机已经完成研制,这对航空机载设备的国产化具有重要意义。在基于目视飞行的通航飞行测试中,运动态势判定的离散型引起了两次漏警,因此,下一步的研究方向是基于大数据的运动态势特征分析和滤波处理。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
西安航空学院学报(2021年1期)2021-07-24
科学技术创新(2020年28期)2020-09-23
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电脑爱好者(2020年6期)2020-05-26
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
中国市场(2016年36期)2016-10-19
科教导刊·电子版(2016年13期)2016-06-28