
基于虚拟现实技术的无人机远程激光装置高质量成像方法
2021-11-30 06:05吴建美
内蒙古民族大学学报(自然科学版) 2021年5期
吴建美
(福州软件职业技术学院,福建 福州 350005)
0 引言
无人机在军事和民用领域发挥着非常重要的作用.可长时间进出各种危险空域,具有体积小、结构简单、维护方便、灵活性好等优点[1-2].然而,无人机的驾驶和正常使用是一个复杂的过程[3-4],无人机目标成像过程较为复杂.
徐伟等[5]以实现遥感卫星设计和多光谱成像为研究对象,根据星载一体化理念和多模式成像理念,完成卫星相关指标、方案和关键技术设计和多模式下光学成像.实验结果表明,该技术完成过程简单,但存在成像质量较差的问题.兰富洋等[6]以剪切光束成像技术为依据,在二维成像模型基础上构建三维目标成像模型,同时根据所建模型分析两剪切光和参考光之间频差对目标成像产生影响.实验结果表明,该技术成像后质量较高,但存在成像过程灵活性差的问题.张驰等[7]以解决计算机视觉相关问题为目标,从4个角度分析光场成像技术进展:光场成像设备作为视觉传感器存在的优势与劣势;光场相机是计算机视觉传感器标定和解码与预处理的一种渠道;四维光场下图像渲染及重建方法;将四维光场信息数据当作成像特征表征方式.实验结果表明,该技术下成像过程稳定性较好,但存在成像耗时长的问题.
成像技术在遥感、医学等方面均有着十分广泛的应用[8-9].为了解决成像质量低、成像过程灵活性差和成像耗时长的问题,提出基于虚拟现实技术的无人机远程激光装置高质量成像方法.
1 基于虚拟现实技术的无人机远程激光装置高质量成像
1.1 无人机远程激光装置高质量成像抗干扰设计
利用远程激光技术实现无人机远程激光装置高质量成像过程中,激光在大气传输会受到很多因素干扰,影响成像质量和成像效率[10-12].为降低远程激光成像的误判率,提升成像质量和效率,设计抗干扰单元.无人机远程激光装置高质量成像抗干扰单元主要是在远程激光发射与接收2个位置进行信号的编码,能够基于不同成像条件实现特定激光信息编码,进而达到比较好的成像效果.在该模块中,对激光信号实施二进制编码操作,其中,1代表发射1个激光,0代表不发射激光.接收回波信号过程中信号放大设备能够读取最开始发射时的信息编码,假设回波编码信息匹配程度低,则不将其当作有效回波信号.图1中,编码信号是1,0,1,0,0,在接收系统中,假设回波信号调制编码不是1,0,1,0,0,那么将其当作无效的回波信号;反之,假设回波信号编码为相同的,则能够继续进行成像,以此避免干扰因素对成像过程的影响.
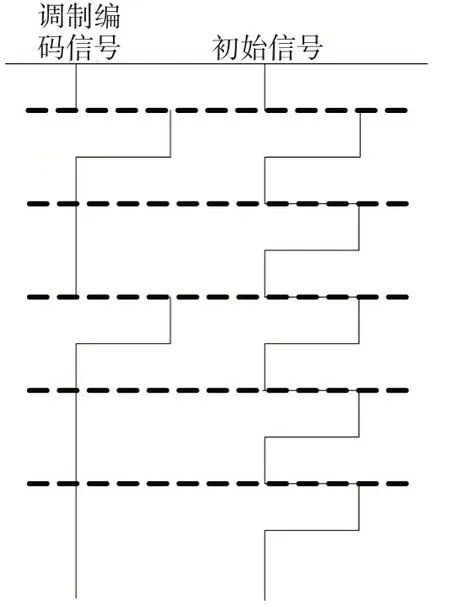
图1 编码信号原理 Fig. 1 Principle of coded signal
1.2 无人机远程激光装置高质量成像
基于1.1抗干扰设计,利用远程激光完成无人机远程激光装置高质量成像.远程激光成像主要以空间几何为依据实现,激光经过物体而产生反射,并在摄像机画面上形成一个像点,像点会随着激光与物体之间的距离不同,在传感器上来回移动,以此提升成像过程的灵活性.
为了满足无人机远程激光装置高质量成像需求,在此采用一种线性结构远程激光,在成像时向被测对象投射一个激光条,因物体表层的曲率不同,相机拍摄时的光线中心也不同.利用线结构激光,能够得到激光条上相应点位置信息.图2为远程激光成像模型.
在远程激光成像中,需要先考虑处在水平面上激光点A,利用计算激光点在投影平面产生的像素点x的值,能够得到点A至远程激光成像体系平面上距离d和照射点至板面中心距离L.RtΔABC与RtΔDEC在一个平面,角ACB和角DCE相等,根据三角形相似可知ΔABC和ΔDEC相似,进而可得:

其中,依据图2中存在的等量关系能够得到式(2)和式(3):

图2 远程激光成像模型Fig. 2 Remote laser imaging model


其中,s代表激光到相机中心距离,f代表相机焦距,ω代表相机像素值,N代表图像横向像素数量.
根据上述计算,能够得到距离d与L表达式:

针对水平面之外的点A′,引入补偿角γ.在远程激光成像过程中,A与A′ 至板面中心产生的夹角和至相机中心产生的夹角α近似,则有:

依据式(6)可知:

其中,y代表投影点A′ 在相机画面中占据的行数,N′ 代表图像纵向像素数量.
得到补偿角γ之后,能够获取点A′ 至成像中心之间的距离L′.以此类推,能够获取激光带上随机点至成像中心之间的距离:

利用操控舵机转动角ε,将板面中心轴作为转动轴,以此带动远程激光相机实现距离深度测量,进而得到光点在空间坐标中三维坐标,通过三维坐标可准确定点成像位置,完成无人机远程激光装置高质量成像.

其中,θ代表照射点到中心和远程激光成像平面产生的夹角,ε代表远程成像采集板面与横轴产生的夹角.
基于式(10)的计算,得到的最终成像结果可表示为:

1.3 无人机远程激光装置高质量成像结果优化
为了使成像结果更好地呈现,需要对成像结果进行处理.在此,利用图像分割法处理成像结果,使图像区域划分明确,特征点更加突出.
当前,比较常见的图像分割方式有:以图像灰度特性为依据的方差法,还有以图像方向信息为依据的方向图法.其中的方差法比较适合分割背景区域,对于灰度变化比较小的区域,该方法有误判现象.方向图法对变化较小区域有着比较好的分割效果,但背景区域分割效果不是十分理想.在无人机远程激光装置高质量成像结果处理中,将方向图法与方差法结合,然后通过简单阈值法将边缘效应消除,最终得到较为理想的图像分割效果.详细分割过程如下:
假设z(i,j)代表无人机远程激光装置高质量成像结果中各块灰度方差,g(i,j)代表无人机远程激光装置高质量成像结果中各个像素点灰度值,a(i,j)代表根据方向图法分割之后无人机远程激光装置高质量成像结果中各个像素点灰度值,b(i,j)代表根据方差法分割之后成像结果中各像素点灰度值,c(i,j)代表通过简单阈值法分割之后成像结果中各像素点灰度值,G(i,j)代表根据结合法分割之后成像结果中各像素点灰度值,即最终分割结果.
根据上述参数设置则有:

式(12)中,V代表灰度方差阈值,在成像结果分割实现中,将该值取值设置为无人机远程激光装置高质量成像结果中各块灰度方差均值.R代表灰度阈值,该值取值为无人机远程激光装置高质量成像结果平均灰度值.
2 实例测试与分析
为验证基于虚拟现实技术的无人机远程激光装置高质量成像方法有效性,测试选用无人机如图3所示,实验场地为某无人机试飞区.

图3 测试选用无人机Fig. 3 UAV selected for experiment
实验之前的准备工作为:确保各个实验需要的传感器能够正常获取数据;将计算机控制系统开启;初始化调试体系;对相机进行白平衡操作;开启激光.
准备工作完成后,成像前,为使成像结果更为精确,要将整个成像体系标定好,保障所得数据为有效数据.
依据上述实验环境设定,在以下方面验证所提技术:
(1)成像结果质量;(2)成像过程灵活性;(3)成像耗时.
实验结果如下:
由图4可知,基于虚拟现实技术的无人机远程激光装置高质量成像方法下的成像结果有效像素数量要高于当前相关研究成果,这表示该技术具有很高的可靠性.该技术在成像之前,分析了成像过程中存在的干扰因素,并设计了抗干扰模块,初步增强了成像质量,以抗干扰设计为基础,通过远程激光技术完成了无人机远程激光装置高质量成像,为了进一步提升成像结果质量,将方向图法与方差法结合,通过简单阈值法将边缘效应消除,以此得到的成像结果更为理想.
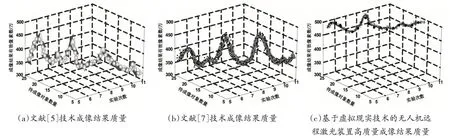
图4 不同技术成像结果质量对比Fig. 4 Quality comparison of imaging results of different technologies
分析图5,所提技术运行过程灵活性明显优于文献[6]技术和文献[7]技术,因为该技术以空间几何为成像依据,激光经过物体而产生反射,会在摄像机画面上形成一个像点,而像点会随着激光与物体之间的距离不同,在传感器上自适应性地来回移动,该智能性操作有效提升了无人机远程激光装置高质量成像过程的灵活性.

图5 不同技术成像过程灵活性对比Fig. 5 Comparison of flexibility of imaging process of different technologies
表1中,H1代表待成像对象编号.H2代表文献[7]技术成像耗时,单位为s.H3代表文献[5]技术成像耗时,单位为s.H4代表基于虚拟现实技术的无人机远程激光装置高质量成像方法成像耗时,单位为s.
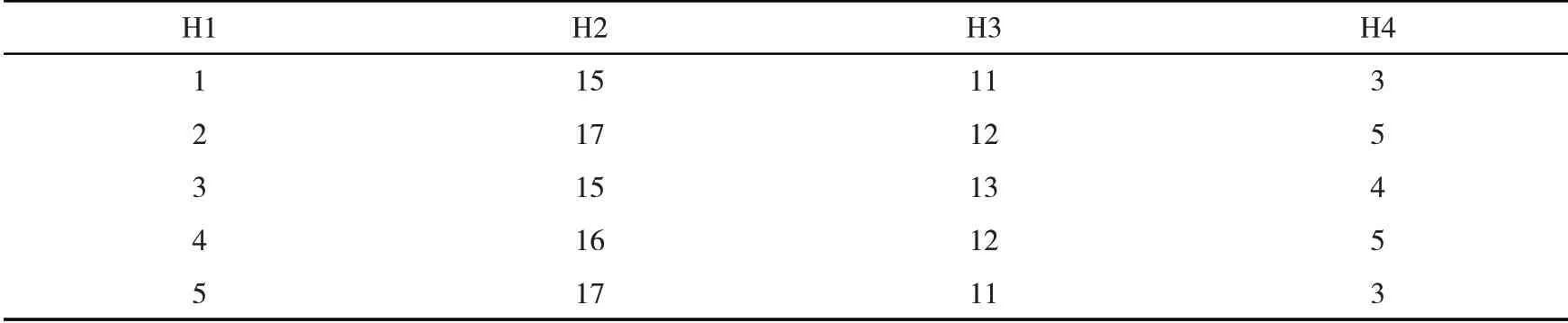
表1 不同技术成像耗时对比Tab. 1 Comparison of imaging time of different technologies s
从表1中可以看出,基于虚拟现实技术的无人机远程激光装置高质量成像方法整体运行耗时最短,因为该技术考虑到无人机远程激光装置高质量成像过程中,激光在大气传输时会受到众多因素干扰,降低成像效率,设计了成像过程抗干扰模块,以此减少成像耗时,增强成像性能.
3 结论
提出基于虚拟现实技术的无人机远程激光装置高质量成像方法.分别通过抗干扰设计、远程激光成像、处理成像结果完成整个无人机远程激光装置高质量成像过程,并通过实验证明了所提技术的有效性.
针对下一步研究,提出以下建议:数据采集是激光成像中的重点内容,可引入GPS等技术更多地采集无人机运行环境信息数据,以提升无人机远程激光装置高质量成像精度;数据处理和匹配是得到高质量成像结果的重中之重,可结合性能较为优越的数据处理方法和匹配算法,进一步完善成像技术.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代妇女(2022年5期)2022-05-25
英语文摘(2021年11期)2021-12-31
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
学生天地(2018年19期)2018-09-07
海外星云(2016年7期)2016-12-01
IT时代周刊(2015年7期)2015-11-11
声屏世界(2015年7期)2015-02-28
