基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析
2021-11-28 20:55王永丽
今日自动化 2021年8期
王永丽


[摘 要]随着现在软件技术的发展,三维建模、仿真软件越来越普及化,SolidWorks软件由其界面操作简单、功能强大被机械设计行业广泛应用,采用SolidWorks软件对某工业机器人机械臂的三维模型结构进行拓扑优化设计,采用SolidWorks simulation软件对机械臂进行静力学、模态仿真分析,几何清理和网格划分,通过计算,设计出较合理的肘关节减速机传动齿轮;达到了工业机器人机械臂高精度柔性运动,机械臂高强度、刚度、最小安全系数和减小应力集中的效果,解决了工业机器人机械臂的优化设计。
[关键词]SolidWorks;工业机器人;机械臂; 仿真分析; 优化设计
[中图分类号]V279 [文献标志码]A [文章编号]2095–6487(2021)08–0–03
[Abstract]With the development of software technology, three-dimensional modeling and simulation software are becoming more and more popular. SolidWorks software is widely used in mechanical design industry because of its simple interface operation and powerful function. SolidWorks software is used to optimize the topology of the three-dimensional model structure of an industrial robot manipulator, and SolidWorks simulation software is used to optimize the statics and dynamics of the manipulator Through modal simulation analysis, geometric cleaning and mesh generation, a more reasonable transmission gear of elbow reducer is designed through calculation; It achieves the effect of high-precision flexible motion, high strength, stiffness, minimum safety factor and reducing stress concentration of industrial robot manipulator, and solves the optimization design of industrial robot manipulator.
[Keywords]SolidWorks; industrial robot; robot arm; simulation analysis; optimal design
工业机器人机械手臂由三部分组成,分别是机械部分、传感部分、控制部分。就机械结构而言,机械臂是工业机器人的主要承载和执行机构,设计和计算每个零件的强度、承载能力是整个机构的核心,机械臂每个肘关节机械传动方式、电机驱动控制方式必须达到理想的精度,要验算机械强度、驱动功率和计算负载的重量,各运动路径的惯量计算,位姿的控制计算,才能使工业机器人在执行工作中确保万无一失。在多自由度机械臂程序设计中,其工作方式主要通过沿着X、Y、Z轴上做线性运动,其中沿X轴平移,沿Y轴平移,沿Z轴平移和绕X轴转动,绕Y轴转动,绕Z轴转动,以达到目标位置。自由度是整个机械臂执行工作的决定因素,为了提高机械臂的运动速度,要尽量减少臂部和肘关节的部分重量,要合理选择零部件的材料,机械臂部设计轻量化,以减少整个手臂对回转轴的转动惯量,必要连接部分必须采用高强度热处理合金钢材料,同时对所选零部件进行受力分析,以达到最优选型。
1 机械臂柔性体动力学对机械臂结构的影响
1.1 机械臂弹性变形
取机械臂关节为研究对象,进行弹性形变测试,机械臂关节变形工作是在传动件配合完成的,关节中的弹性变形是以改变原子间的距离来实现的,外力与弹性变形之间的关系由胡克定律可得知,σi=Cε,即变形与外力的大小成正比,比例常数C为弹性模量,它反映的是金属材料抵抗弹性变形的能力,考虑到机械臂末端手腕关节柔性对动力学性能的影响较小,由此可忽略手腕关节,只考虑机械臂的大摆臂关节、小摆臂关节以及肘关节。
1.2 机械臂固有频率影响因素分析
对于机械臂的结构设计来说,主要分大摆臂、小摆臂、肘关节几个重要连接部件。肘关节由电机驱动减速器,经较大减速比传动后再驱动大摆臂和小摆臂及负载绕关节轴线转动,由此会产生谐振现象,为了降低谐振,机械臂结构谐振频率应当控制在伺服系统闭环带宽的4~5倍,以避免机械臂整个系統产生谐振,不同关节刚度对不同阶段机械臂固有频率影响各不相同,各传动轴带动的负载不同,总体是大摆臂关节影响机械臂末端上下振动频率;肘关节影响肘部弯曲振动频率,这表明基于柔性多体动力学进行机械臂结构优化设计时,需要考虑到不同关节刚度。
2 机械臂结构拓扑优化设计方式
2.1 优化设计模型分析
图1为某机械臂SolidWorks三维建模模型,整个机械臂是通过大机座固定于某一工作台面,大机座上承载整个柔性机械臂的运动环节,所以材料不能有应变和断裂现象,一般选择经过热处理的优质合金钢,大摆臂和小摆臂由于是运动部件,且机械臂需要有良好的受控性,因此选型材料不能太过笨重,则采用优质轻型高强度铝材料即可,其目的是减小转动惯量,然后通过有限元分析大机座受力情况。
2.2 具体优化设计方式
取机械臂大摆臂为研究对象,设计机械臂大摆臂要根据结构造型和选择材料进行最少化和优化考虑,采用以高强度7075铝替代钢或铸铁材料,选用高强度铝材料后一般将大摆臂末端固定端壁厚加厚,中间部分掏空,四周拉起加强筋,最中心位置再加一横筋,使整个大摆臂撑起抵抗扭转变形的目的,使其强度完全满足强度设计要求,防止在机械臂工作过程中受力变形,经过基于柔性多体动力学机械臂结构优化设计后,机械臂重量下降 10%;优化后的机械臂载重和自重比未经过优化的机械臂会提高0.42。
3 以六自由度工业机器人的大摆臂为研究对象
3.1 静力学分析
在SolidWorks simulation软件中打开新算例进行静力学分析。大摆臂材料设置为材料为7075合金,密度2.81 kg/cm3,弹性模量71 E/GPa,泊松比0.33,屈服强度455 MPa。如图2将大摆臂底面绿色箭头设为固定约束面,上面和侧面红色箭头为施加力面,由分析結果可知,大摆臂的最大应力为83.80 MPa,最小应力为47.70 MPa,最大位移0.112 8 mm,最小安全系数为15.22,强度完全满足要求;仅在零件的红色区域弯角处,存在部分应力集中。如图2将大摆臂底面设为固定约束面和施加力面。
3.2 模态分析
在SolidWorks simulation中选择新算例进行模态分析,选择适当的参数进行网格划分,如图3设置大摆臂底面绿色箭头为固定约束面;上面和侧面红色箭头为施加力面,在结果后处理阶段设定好前6阶模态的总变形,进行模态分析。由分析结果可知,大臂结构的最低频率为1 111.1 Hz,比优化前的大摆臂频率高,动态特性较好,结构设计较合理。
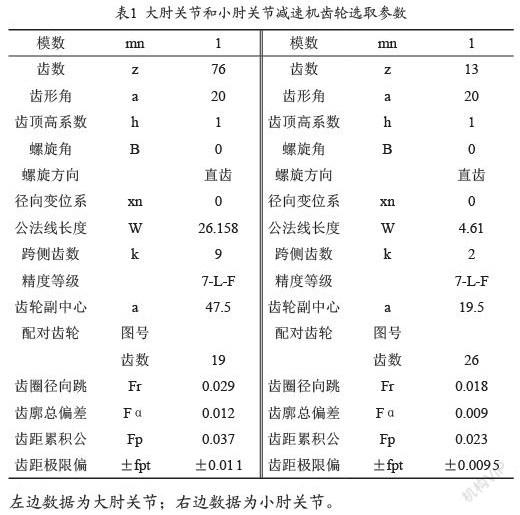
3.3 肘关节电机驱动部分减速机圆柱齿轮传动设计
(1)设计参数
传递功率:1 传递转矩:9.549
齿轮1转速n1:1000 齿轮2转速n2:250 传动比i:2
(2)齿轮精度
第Ⅰ组精度JD1:7 第Ⅱ组精度JD2:7
第Ⅲ组精度JD3:7 齿厚上偏差:F 齿厚下偏差:L
大肘关节和小肘关节减速机齿轮选取参数见表1。
4 结论
在对某型号工业机器人的大摆臂静力学分析和模态分析,由分析和设计结果得知大摆臂结构设计较合理,只有弯角部分存在少量应力集中的现象。结构优化和减速机齿轮设计符合柔性机械臂自由度传动要求。通过对比优化设计前、后大摆臂的分析结果,优化后大臂的结构更加合理,其刚度、强度性能明显增强,最小安全系数提高显著,轻量化效果明显,为机械臂的加工生产降低了成本。
参考文献
[1] 梁明轩,李正刚,唐任仲,等.基于柔性多体动力学的机械臂结构优化设计[J].中国机械工程,2017(21):2562-2566.
[2] 刘宇佳.串联机械臂柔性多体动力学性能研究[D].北京:北京理工大学,2016.
[3] 任立敏,杨忠良,谭益松.多关节新型机械臂设计及其坐标反馈系统研究[J].东北电力大学学报,2018(2):34-39.
[4] 崔中,文桂林,姜潮.基于ADAMS柔性体的高速磨床主轴系统结构分析及优化设计[J].中国机械工程,2009(5):518-522.
[5] 林舒静,郑誉煌.基于SolidWorks的多关节机械臂设计分析[J].山东工业技术,2019(21):37-1222.
[6] 韩德东,魏占国,邵忠喜.基于SolidWorks与有限元理论一种机械臂设计方法的研究[J].信息技术,2013,41(1):85-88.
[7] 魏占国,刘晋浩.基于SolidWorks与有限元理论联合采伐机机械臂的设计方法[J].东北林业大学学报,2010,38(8):111-114.
[8] 夏学文,李峰,郭小刚,等.基于SolidWorks的机械手三维建模及其运动仿真[J].煤矿机械,2010(10):215-216.
[9] 陈进平,郑伟,姚海峰.基于SolidWorks软件与VB编程的渐开线齿轮精确建模[J].科技广场,2009(7):108-110.
[10] 刘军,李振军.如何提高SolidWorks的装配体性能[J].CAD/CAM与制造业信息化,2006(12):53-55.
猜你喜欢
农机使用与维修(2016年12期)2017-01-17
科技创新导报(2016年21期)2016-12-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
计算机教育(2016年7期)2016-11-10
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19