野战医疗方舱自动调平系统研制
2021-11-27 10:04徐新喜孟令帅曲鹏涛赵秀国
医疗卫生装备 2021年11期
高 升,苏 琛,吴 航,徐新喜,孟令帅,曲鹏涛,赵秀国*
(1.军事科学院系统工程研究院卫勤保障技术研究所,天津 300161;2.军事科学院系统工程研究院,北京 100166)
0 引言
野战方舱医院是实现现场伤病员有效救治的重要装备,主要担负战创伤救护、卫生应急救援、传染病疫情应急防控、突发灾害应急医学救援、国际医疗救援等任务,是战役卫勤保障的主要力量,在现代战争和非战争军事行动中发挥着重要作用。野战医疗方舱作为野战方舱医院的基本功能单元,以方舱为载体,通过加装不同功能的医疗设备实现不同的救治功能,具有机动性能好、环境适应性强等特点[1]。野战医疗方舱展开时,需要对舱体进行调平,从而保证舱体的水平度、安全性和稳定性,确保方舱内医疗设备顺利展开、正常使用,满足医护人员开展医疗作业的需求。调平速度与调平精度是影响野战医疗方舱部署的重要因素。为此,国内外针对医疗方舱的调平装置开展了系列研究。韩俊淑等[2]研制的特诊检验方舱、吴文娟等[3]研制的新型核化伤员洗消方舱和加拿大Weatherhaven公司[4]研制的可扩展方舱均通过手动操作机械调平装置进行调平,且调平时需要观察气泡水平仪来判定方舱是否水平,调平速度慢、调平时间长、操作费力复杂,对操作人员的技术水平也有一定的要求。王政等[5]研制的四板联动方舱和王洪杰等[6]研制的新型移动智能拓展检查检验医疗方舱则采用液压式自动调平。液压式调平虽然具有负载能力大、质量体积小等优点,但其存在液压缸容易漏油、调平精度低、反应滞后、对温度敏感等缺点。与液压式调平相比,机电式调平具有成本低、稳定性好、控制精度高、维护简单且能自锁等优点。此外,伺服电动机的广泛应用以及其他相关技术的不断更新,使得精度和稳定性更高的机电式调平取代液压式调平成为一种趋势。李明等[7]研制的新型大扩展比智能拓展车载医疗方舱及综合检查检验车就采用了机电式自动调平,但该系统主要应用于整车调平,应用于标准方舱的机电式调平系统则未见报道。基于此,为解决现有野战医疗方舱调平精度低、调平时间长、人力需求大等问题,亟须研制一种调平精度高、速度快的机电式野战医疗方舱自动调平系统。本文开展野战医疗方舱自动调平系统研究,旨在提高方舱调平速度和精度,提升野战医疗方舱快速部署能力,实现野战方舱医院快速部署,对于提高平战时伤员救治能力具有极其重要的意义。
1 建模分析
1.1 数学模型
野战医疗方舱自动调平系统采用四点支撑调平,其调平示意图如图1所示。其中,X方向的倾角为β,Y方向的倾角为α,水平面坐标系为O-XYZ,方舱调平平面坐标系为O-X'Y'Z'。Pi(i=1,2,3,4)为方舱调平后处于水平状态下的4个支撑点,其坐标为(xi,yi,zi),Pi'(i=1,2,3,4)为方舱调平前非水平状态下方舱的 4 个支撑点,其坐标为(xi',yi',zi')。
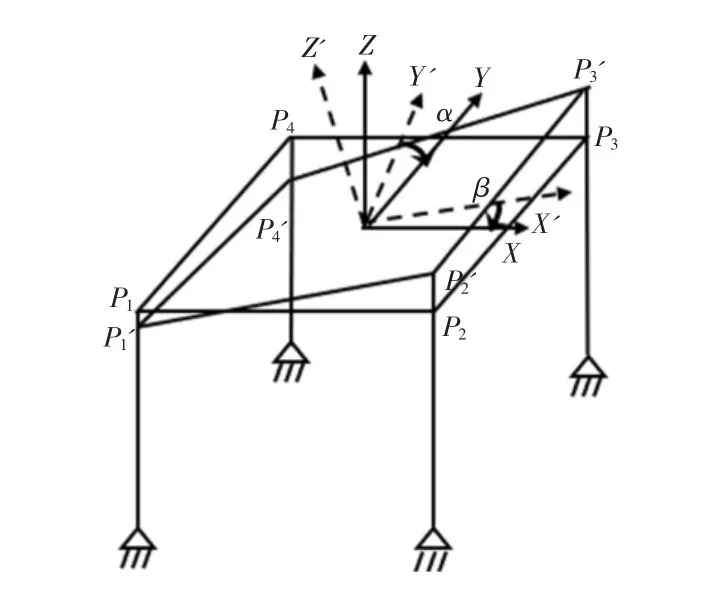
图1 野战医疗方舱自动调平系统调平示意图
由空间坐标变换理论可知,O-XYZ可分别绕Z轴、Y轴、X轴旋转 γ、β、α变换为 O-X'Y'Z'。2个坐标系之间的变换矩阵如下:

调平过程可看作非水平状态下的坐标系O-X'Y'Z'经坐标变换为水平状态下的坐标系O-XYZ,则4个支撑点调平前后坐标有如下关系:

由于自动调平系统的4个调平支腿皆为刚性,且方舱调平是在调平支腿着地之后进行的,4个支撑点在XOY平面内的位移非常小,可忽略不计,因此γ≈0。则公式(2)可简化为
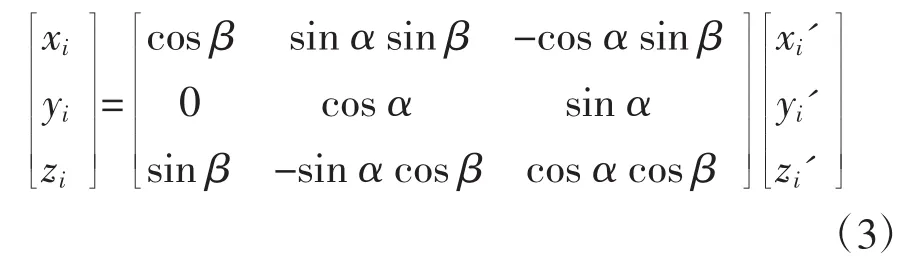
当β和α的角度较小时,可进行如下近似:(1)sin α sin β≈ 0;(2)sin α≈ α,sin β≈ β;(3)cos α≈ 1,cos β≈1。则公式(3)可简化为
实际调平时,若β和α均小于3°时,其相对误差不大于 0.1%[8]。
当β或α的角度较大时,可利用微分的思想,对方舱调平复杂空间运动进行离散,将β或α分成几个较小的角度,再计算相邻2个局部平面支撑点的坐标关系。
1.2 调平策略
调平策略主要可以分为位置误差调平法和角度误差调平法2种。角度误差调平法通过控制支腿的升降,分别调节横向和纵向倾角的大小进行调平。其算法实现较为容易,但调平精度和调平速度较差。位置误差调平法指控制器根据传感器测量的数据判定各支撑点的高低,计算出各支撑点需要调节的高度误差,而后保持某一支撑点不动,控制其他支撑点运动,从而实现调平。该方法适用于任意数量支撑腿的调平系统[9],调平精度高、速度快,但算法实现较为复杂。
本文研制的自动调平系统采用最高点不动的位置误差调平方法,具体调平过程如下:
(1)根据β和α判断4个支撑点的高低。
(2)根据方舱长 6.058 m、宽 2.438 m,计算出各支撑点的坐标信息。将O-X'Y'Z'坐标系下4个支撑点的坐标P1'(-3.029,-1.129,0)、P2'(3.029,-1.129,0)、P3'(3.029,1.129,0)、P4'(-3.029,1.129,0)代入公式(4),可得4个支撑点在O-XYZ坐标系中的坐标矩阵:

(3)通过公式(5)中的坐标信息即可获得各支撑点距离最高点的高度差。以α>0、β>0时为例,此时支撑点2最高,可求得其他各支腿需要上升的距离:Δ h1=6.058 β,Δ h2=0,Δ h3=2.438 α,Δ h4=6.058 β+2.438 α。
2 系统设计
2.1 系统组成
野战医疗方舱自动调平系统主要由调平支腿、控制系统、传感器(包括倾角传感器、压力传感器和限位开关)和直流电源等组成,原理框图如图2所示。

图2 野战医疗方舱自动调平系统原理框图
野战医疗方舱自动调平系统对调平时间和精度的要求较高,同时需要其调平支腿能够自锁。本文研制的自动调平系统采用精度和稳定性更高的机电式自动调平技术,采用基于倾角传感器的调平方法实现方舱调平。倾角传感器用于检测方舱的倾斜程度,然后反馈给控制系统,控制系统驱动调平支腿运动,调节方舱直至水平。通过在调平支腿上安装压力传感器[10]来实时检测4个调平支腿的受力值,以快速消除“虚腿”现象。
2.2 调平支腿设计
调平支腿是系统的执行机构,起到承担方舱载荷、调节方舱水平和驱动方舱升降的作用,主要由伺服电动机、伺服驱动器、螺旋升降机(包括蜗轮蜗杆传动机构和滚珠丝杆)和限位开关等装置组成,驱动器接收控制系统发送的上升或下降控制指令,然后驱动伺服电动机运转,伺服电动机通过蜗轮蜗杆传动机构带动滚珠丝杆旋转,在丝杆旋转力矩的驱动下,螺母与滑套做往复直线运动,使得调平支腿上升或下降。调平支腿设计升降行程为910 mm,完全收拢时最低点距地面为100 mm,能保证方舱在运输过程中调平支腿不与地面接触,并能充分满足调平和举升需求。图3为调平支腿设计图,图4为调平支腿实物图。

图3 调平支腿设计图

图4 调平支腿实物图
2.3 控制系统设计
2.3.1 控制系统硬件设计
控制系统是野战医疗方舱自动调平系统的控制核心,决定了其调平速度和调平精度。控制系统主要包括控制器、操作屏和控制电路等。其中,控制器和控制电路设置在方舱内的控制箱内,操作屏设置于方舱外部。控制系统接收倾角传感器测量的倾角角度和压力传感器检测到的调平支腿受力值,经控制器处理,发送调平支腿运动信号,驱动执行机构动作,实现方舱的自动调平。此外,控制器还需要和操作屏进行通信,操作屏可显示方舱倾角角度、支腿伸长量和支腿受力值等系统参数,可选择不同的工作模式等,方便操作人员对自动调平系统进行操作。控制系统拓扑关系图如图5所示,控制箱实物图如图6所示。
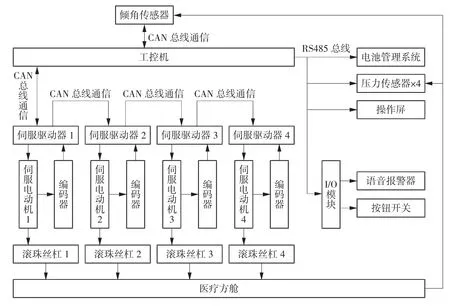
图5 控制系统拓扑关系图

图6 控制箱实物图
控制器采用阿普奇TAC-2020工控机,具有USB、COM、网络接口等多种串口接口,支持Wi-Fi、4G等无线连接,最高支持8 GiB内存,具有4核CPU处理器,输入电压为9~32V。设备网络以工控机为计算和控制核心,通过3种物理总线连接所有外围设备。
2.3.2 控制系统软件设计
工控机安装Ubuntu 18.04系统,在PyCharm环境下使用Python作为主要编程语言,并进行模块化设计,加强了程序的可移植性。自动调平系统调平流程如图7所示。系统开启后,首先进行自检,自检正常后方可进行操作,否则将显示故障。然后通过操作屏选择不同的控制模式,对系统进行操作控制。
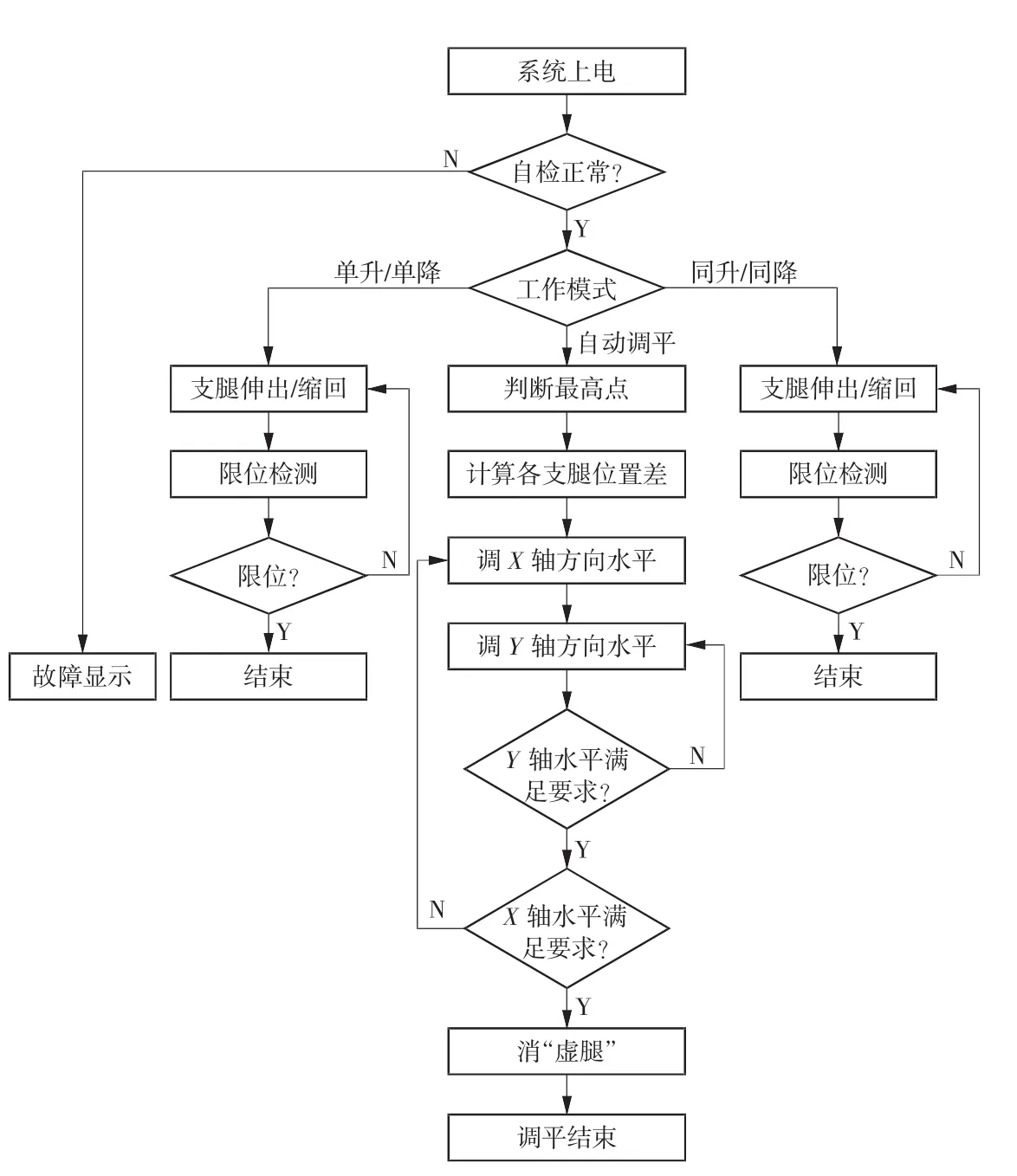
图7 野战医疗方舱自动调平系统调平流程图
2.4 关键器件选型及其主要技术参数
2.4.1 直流电源
直流电源采用锂电池储能,电池工作电压为48 V,容量为100 Ah,能满足3次调平展收要求,同时可通过充电器为锂电池充电。
2.4.2 倾角传感器
自动调平系统的调平精度与倾角传感器的精度密切相关。选用北微双轴高精度倾角传感器BWH525。该传感器采用微机电系统(micro-electro-mechanical system,MEMS)技术、控制器局域网络(controller area network,CAN)输出,内置自动补偿和滤波算法,减小了环境变化引起的误差。其测量范围为±30°,精度为0.005°,输出频率为 5~100 Hz,防护等级达 IP67,工作温度为-40~85℃。
2.4.3 压力传感器
压力传感器用来测量支腿受力值,以避免因支腿受力过大而造成支腿受损和“虚腿”导致的舱体不稳定状态。采用中皖金诺JHBM-H1型平面膜盒式称重传感器,量程为3 t,灵敏度达到(2.0±0.1)mV/V,综合精度为0.1%FS,工作温度范围为-20~70 °C,防护等级为IP66。
2.4.4 伺服电动机
电动机选用大功率直流伺服电动机,型号为惠斯通110ST-J06030B-48 V,其额定功率为1.8 kW,额定电流为 44.1 A,额定转速为 3000 r/min,额定扭矩为6 N·m,峰值扭矩为18 N·m,转子惯量为 7.6 kg·cm2,机械时间常数为 20.2 ms。
伺服驱动器选用低压直流伺服驱动器,型号为风得控VSY30D72,可通过位置、速度和力矩3种方式对伺服电动机进行控制,从而实现高精度的传动系统定位。其额定电流为30 A,最大电流为60 A,驱动频率为8~14 kHz,具有硬件保护、欠压保护、过压保护、过热保护、超载保护、过流保护、故障锁定等功能,通信协议为RS485和CANopen。
2.4.5 螺旋升降机
螺旋升降机是将伺服电动机的旋转运动转变为丝杠升降运动的传动机构,主要包括蜗轮蜗杆传动机构和滚珠丝杆。螺旋升降机选用军飞SJA80,其最大提升力为80 kN,最大输入功率为2.5 kW,丝杠导程为8 mm,满载启动扭矩为75 N·m,蜗轮蜗杆减速比为 1∶8,空载扭矩为 1.85 N·m。此外,螺旋升降机还具有自锁功能,即使没有制动装置也能保持当前的状态。
2.5 整体设计
野战医疗方舱自动调平系统可实现方舱的自动调平和自动举升,还具有良好的移植性和通用性,使其应用领域进一步拓宽。方舱最大总质量为10 t,外形尺寸为 6058 mm×2438 mm×2438 mm(长×宽×高)。考虑到医疗方舱抗倾覆性、“虚腿”问题[11]以及其结构特点,自动调平系统采用四点刚性支撑结构。野战医疗方舱自动调平系统在方舱上的安装设计如图8所示。方舱四角分别设计了调平支腿,通过连接件与方舱连接。倾角传感器安装于方舱内部顶板中心,控制箱和直流电源位于舱内。操作屏设置在方舱外壁,包括显示屏和控制按钮,可以对自动调平系统进行操作控制,显示系统的倾角角度、支腿位移和受力值等各项参数。
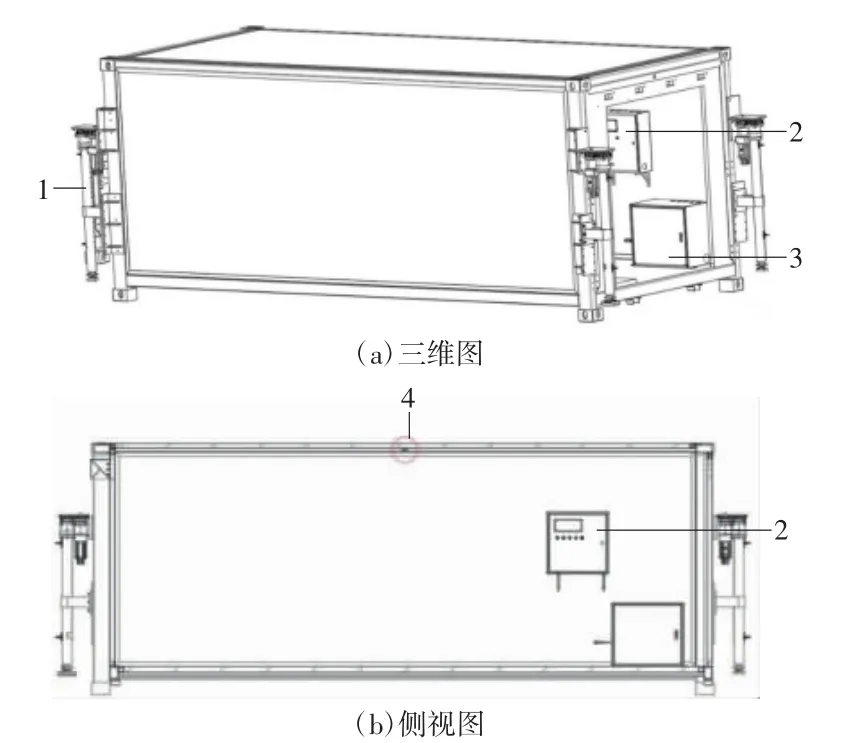
图8 野战医疗方舱自动调平系统在方舱上的安装设计图
野战医疗方舱自动调平系统在方舱上的安装实物如图9所示。自动调平系统接通电源后,通过操作屏[如图9(c)所示]即可对自动调平系统进行操作控制。显示屏可实时显示调平支腿的高度、压力、电流和电池电量及方舱倾角等参数[如图9(d)所示]。操作屏下方设置急停按钮,无论系统运行至任何状态,按下急停按钮,系统将进入停止状态。

图9 野战医疗方舱自动调平系统方舱安装实物图
自动调平模式下,在显示屏主界面上按下启动即可自动调平。手动控制模式下,分为单调平支腿操作和调平支腿同步操作。调平支腿同步操作时,可设定4个调平支腿为同时升降模式,在显示屏输入调平支腿上升/下降量(或按住上升/下降按钮),所有支腿同步上升/下降。单调平支腿操作时,可选定单腿升降模式,可以实现调平支腿的单腿操作,以满足不同调平情况下的使用要求。
3 系统试验
3.1 试验目的
野战医疗方舱自动调平系统研制后,开展了性能试验,主要包括功能试验和调平性能试验。其中,自动调平系统的功能试验主要是测试其各项功能是否正常、设计是否合理,以保证试验能够安全、顺利地进行;调平性能试验主要是验证系统能否实现方舱快速、准确的调平。
3.2 试验方法
自动调平系统功能试验在手动控制模式下进行,分别对调平支腿进行单腿升降、调平支腿同步升降,观察各个调平支腿是否按要求进行升降运动,并监测显示屏上显示的支腿位置变化信息。在调平支腿升降过程中,测试限位开关和急停按钮是否正常工作。
自动调平系统调平性能试验时,将方舱调整至非水平状态,然后启动自动调平系统并设置为自动模式。在自动模式下,方舱自动调整至水平状态,记录调平时间和调平前后方舱倾角,横向、纵向倾角均小于0.1°视为合格。在3种不同的初始条件下重复试验3次,分别记录每次试验数据。
3.3 试验结果
功能试验结果表明,自动调平系统各部分功能正常、设计合理,能够完成后续各项试验,详见表1。调平性能试验结果表明,方舱自动调平时,3次试验调平时间分别为 22、31、37 s,均小于 1 min,调平精度均小于0.1°,详见表2。自动调平系统有效提高了方舱调平时间和调平精度,提高了野战医疗方舱的快速部署能力。
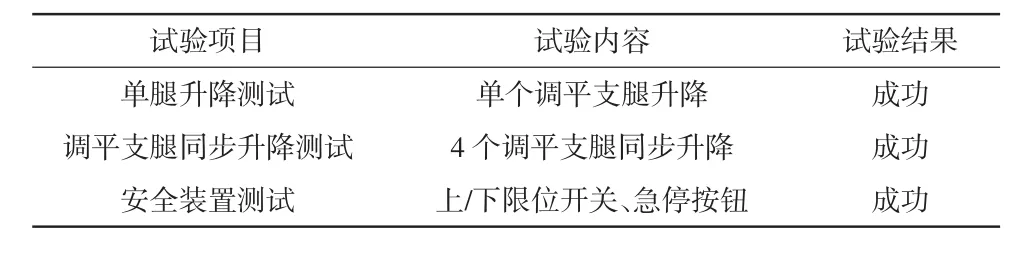
表1 野战医疗方舱自动调平系统功能试验结果
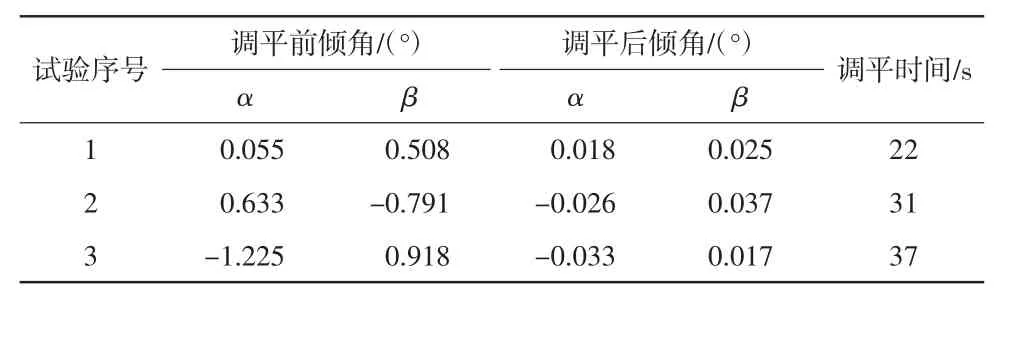
表2 野战医疗方舱自动调平系统调平性能试验结果
4 结语
本文针对现有方舱调平装置调平精度低、调平时间长、人力需求大等问题,研制了野战医疗方舱自动调平系统,用于实现方舱快速、精准调平。自动调平系统采用最高点不动的位置误差调平策略,采用四点支撑机电式调平的方式,使用倾角传感器测量方舱倾角,并通过在调平支腿上安装压力传感器来解决“虚腿”问题。试验结果表明,自动调平系统的调平时间小于1 min、调平精度小于0.1°,实现了方舱快速、准确调平。自动调平系统的研制提升了野战医疗方舱的展开速度,对于提高野战方舱医院的部署速度、增强平战时卫勤保障能力具有极其重要的意义。本文自动调平系统试验均在硬质地面和正常环境条件下进行,其在松软地面和极端环境条件下的性能和可靠性仍有待进一步验证,尚需进行后续深入研究。
猜你喜欢
大学数学(2022年6期)2023-01-14
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
森林工程(2018年4期)2018-08-04
中国公路(2017年15期)2017-10-16
百姓生活(2017年6期)2017-06-10
航天工业管理(2017年4期)2017-05-12
幸福(2016年9期)2016-12-01
幸福家庭(2016年10期)2016-11-25
幼儿教育(2015年26期)2015-11-24