
激光雷达在智能网联汽车上的应用
2021-11-27 02:33:54任保宽
山东交通科技 2021年5期
任保宽
(山东工程技师学院,山东 聊城 252000)
引言
激光雷达(LIDAR)基于光的探测与测距,以激光作为载波,向目标物发出激光探测信号后接收目标物返回信号,激光雷达对接收信号进行比较分析、处理,从而获取目标物的目标方位、距离、速度、高度、状态、形状等相关参数信息[1],实现对目标的探测、跟踪和识别。如果将激光雷达与惯性导航设备、GPS等装备在智能网联汽车上配合使用,可获取有效数据信息并生成精准数字高程模型。
《智能网联汽车技术路线图2.0》中提及,到2035年智能网联汽车技术及产业体系将全面建成,车辆智能化大大提高,高度化的自动驾驶网联智能车辆将大规模应用。激光雷达作为环境感知技术设备在智能网联汽车上应用将会更加普遍。
1 激光雷达传感器结构及原理
1.1 激光雷达传感器结构
激光雷达主要由发射部分、接收部分、扫描模块和控制系统等组成。激光雷达传感器机械部分主要由激光发射器、扫描与光学部件和感光部件等组成。激光发射器是激光雷达中的激光发射机构。激光接收器是汇聚由激光器发射的激光照射到障碍物后,通过障碍物反射后的光线。控制系统可对信号处理单元负责控制激光器的发射,以及接收器收到的信号进行处理,并根据这些信息计算出目标物体的距离信息。扫描机构能扫描所在平面,并产生实时平面图信息。
1.2 激光雷达传感器工作原理
1.2.1 激光雷达脉冲测距
测距仪发出光脉冲信号,打在地面的树木、道路、桥梁和建筑物等障碍物上引起散射并返回,测距仪接收系统接收产生的光脉冲返回信号;激光雷达通过对比光脉冲发射与接收的时间间隔,根据光速计算目标距离,见图1。
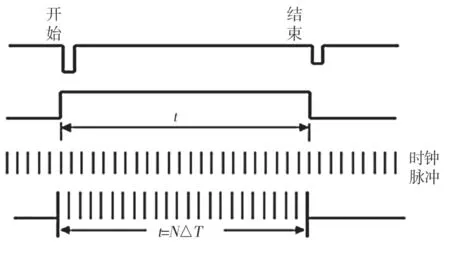
图1 激光雷达脉冲测距原理
1.2.2 激光相位测距
对发射的激光强度进行连续调制,测定调制光往返过程中所经过的相位变化,从而间接测量出传播时间,进而计算出距离,产生强度成余弦变化的连续波,见图2。该精度高于脉冲测距,负载小[2]。

图2 激光雷达激光相位测距原理
假如发射点与反射点的距离(目标距离)为x,激光的速度为c,激光往返时间为t,则有调制波频率为f,从发射到接收间的相位差为φ,则有;N为完整周期波的个数,△φ为不足周期波的余相位;从而得到目标距离
2 激光雷达传感器在智能网联车辆的安装及标定
激光雷达能够探测物体与车之间的距离。道路路面和车道线因反射度不同可被区分,但激光雷达无法探测到被遮挡的或光束无法达到的物体。激光雷达一般被安装在车顶位置,通过高速旋转获得周围空间点云数据,绘制实时车辆周边的三维空间地图,激光雷达还能够测出该车周围车辆在三维方向上的距离、速度、加速度等信息,结合GPS地图计算出车辆位置,ECU对传输的大量数据进行分析处理后对车辆进行快速决策。以速腾聚创16线激光雷达(RS-LiDAR-16)在智能车辆的安装、标定为例进行说明,该雷达为混合激光雷达,有16个激光发射组件。
2.1 激光雷达传感器安装
2.1.1 16线激光雷达设备安装
安装设备时,固定激光雷达的安装底座尽可能平整,安装底座上的定位柱应严格遵循激光雷达底部定位柱的深度;安装激光雷达时,设备倾斜角度不应超过90°,激光雷达线缆不要拉得太紧,激光雷达端子插接正确。
2.1.2 解析数据包
通过解析数据包获得旋转角、测距信息及校准反射率。使用设备时,需把电脑的IP设置为与设备同一网段上,激光雷达和电脑通信时,主数据流输出协议MSOP,将激光雷达扫描出来得出距离、角度、反射率等信息封装成包输出给电脑。
2.1.3 计算坐标值
依据雷达的旋转角,测距及垂直角度计算X、Y、Z轴上坐标值,因雷达仅封装距离和水平旋转角度等参量数据,将极坐标下的距离、角度等参数转化为笛卡尔坐标系下x、y、z坐标,从而达到更好呈现三维点云效果目的。

式中:ω—激光垂直角度,(°);r—激光实测距离,m;α—激光水平旋转角度,(°);x、y、z—极坐标投影到X、Y、Z轴上的坐标,见图3。

图3 激光雷达极坐标投影
2.1.4 存储数据
对于从RS-LiDAR-16得到的原始数据,通过数据可视化软件RSView,能够保存数据,RSView还能将测得的距离测量值显示为一个点,支持多种自定义颜色显示数据,并能将数据导出保存,见图4。
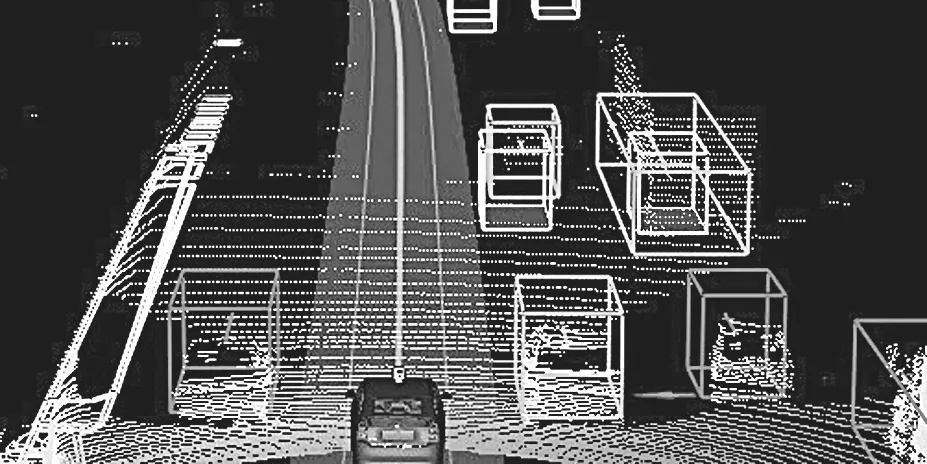
图4 激光雷达点云成像
2.1.5 读取并配置信息
通过RSView软件能够读取装置当前状态配置信息。根据需求重新配置以太网、转速、时间等数据。
2.2 激光雷达传感器标定
为保证相对姿态和位移固定不变,将激光雷达固定在车辆上,对安装的激光雷达进行简单标定来建立各激光雷达之间相对坐标关系,使雷达数据从激光雷达坐标统一转换到车辆坐标上,便于获取目标的距离、角度、速度等参数。
以单线激光雷达为例,车体坐标X轴作为激光雷达扫描角度为零时车辆的指向,Z轴指向车辆上方,X、Y、Z轴构成右手系,激光雷达所有扫描点在同一个几何平面S上,将扫描点P投影到坐标面及坐标轴,扫描点P在车体坐标系中的坐标。

式中:ρ—扫描点到激光雷达的距离,m;h0—安装高度,m;a0—安装俯角,(°);θ—激光扫描角度,(°),见图5。
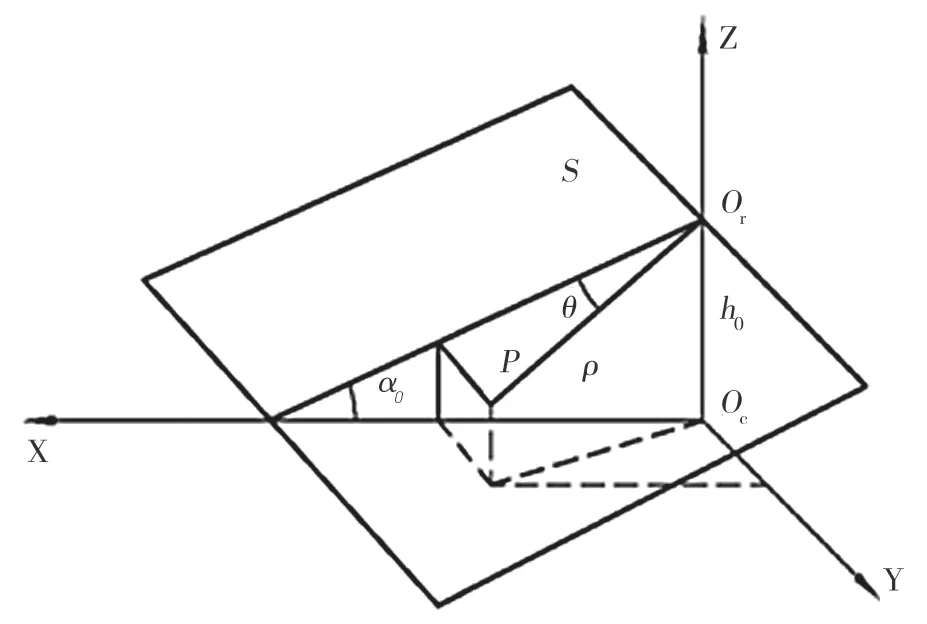
图5 单线激光雷达模型
3 激光雷达传感器在智能网联车辆的应用
3.1 车辆高精度定位
借助定位系统,车辆系统能够通过获得实时位置信息做出决策。但定位方式会受信号的干扰,特别是在经过城市建筑、隧道时信号容易中断。为获得精准位置,激光雷达比对车辆初始位置与高精地图信息。(1)由惯性导航装置、全球定位系统和轮速等传感器提供车辆初步位置;(2)将激光雷达局部点云信息进行特征提取,结合初始位置获取全局坐标系下矢量特征;(3)将矢量特征与高精地图特征信息进行匹配,获取精确的车辆位置。因此,相对其他车载传感器,激光雷达的定位精度及稳定性方面优势明显。
3.2 障碍物识别及目标跟踪
激光雷达可不依赖光照进行实时扫描,扫描视角可达360°,且计算量较小。在扫描中先对障碍物(车、人、隔离带等)进行识别,从而获取该障碍物的空间位置。对障碍物分类、跟踪,则先通过分割点云关联目标,确认上下桢是否属于同一个物体,再进行目标跟踪,输出目标跟踪信息。
3.3 自动泊车系统
安装在车顶或车身四周的激光雷可以检测车辆停车位的位置、感知周围车辆等障碍物,并将获取的有效信息输入到车辆控制系统,为车辆自动泊车的控制决策提供可靠的环境信息。
3.4 车道保持辅助系统
借助激光雷达对车道线检测,车道保持辅助系统在检测到车辆偏离预计行车轨迹时,通过逻辑运算并作出决策,从而控制车辆按照既定的车道轨迹进行行驶。激光雷达对车道线检测方法可基于雷达扫描点密度。该方法为获得所需车道线,可先获取雷达扫描点坐标信息,然后转化为栅格图,最后利用栅格图中点的密度进行提取,该方法实时性好。
3.5 防撞及行人保护
车辆通过快速、实时分析激光雷达等传感器采集的车辆附近环境数据,可提前开启车辆主动安全系统,并向驾驶员发出警告信号,防止与潜在的障碍物发生碰撞,并在车辆可能发生碰撞前及时停车,避免与行人发生碰撞。
3.6 车道偏离预警
如果车辆行驶偏离预定轨迹时,激光雷达通过检测车辆车辆行驶前方车道线标识可能的危险障碍物,并采集车辆在行驶道路中的实时位置信息,若检测车辆行驶轨迹发生偏离并存在危险时,车道偏离预警系统便发生预警信号,使车辆驾驶员及时修正行驶路线,按照预定轨迹行驶。
3.7 自动紧急制动
激光雷达通过对车辆行驶路线前方存在可能发生碰撞的静态或动态危险障碍物进行检测,并将采集信息发送给车辆系统,系统分析可能发生危险时作出决策,使车辆自动紧急制动。
4 结语
利用安装在车辆上的相关传感器,先进驾驶辅助系统(ADAS)能够快速获取车辆内外部环境数据信息,对物体进行静态、动态识别和监测与追踪等处理,让驾驶者及时察觉潜在危险。尽管激光雷达在ADAS方面有优势,但在实际应用中也面临技术、计算性能、价格等问题。未来车用激光雷达将会向高技术指标、全固态、小型化、环境适应能力好、抗干扰能力强、低成本化等方面发展[3],从当前的辅助驾驶系统过渡到半自动驾驶甚至完全自动驾驶,并满足多种视觉与传感技术融合。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
工业经济论坛(2020年6期)2020-04-13 00:38:20
科学(2020年3期)2020-01-06 04:02:51
中国交通信息化(2019年1期)2019-03-26 06:43:46
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
电子制作(2018年16期)2018-09-26 03:27:00
电子制作(2017年7期)2017-06-05 09:36:13
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
