基于单神经元PID的风力发电机机舱轮毂专用吊具电液伺服系统控制研究
2021-11-25 09:08孙宇峰苏东海杨皓琦赵志鑫
机械工程师 2021年11期
孙宇峰,苏东海,杨皓琦,赵志鑫
(沈阳工业大学 机械工程学院,沈阳 110870)
0 引言
风力发电机机舱轮毂专用吊具属于液压自平衡梁式吊具。液压自平衡梁式吊具在传统的机械结构上增加了液压系统和电气控制,解决了起吊物起吊不平衡的问题[1]。随着化石能源的枯竭,风力发电越来越被重视[2]。因此风力发电机机舱轮毂专用吊具具有良好的发展前景。在起吊过程中,风力的干扰是不可抗拒的,所以本文采用自学习能力强的单神经元PID对系统进行控制[3]。
1 专用吊具电液伺服系统数学模型
1.1 电液伺服系统各组成部分数学模型
1)伺服放大器数学模型。
伺服放大器可看作比例环节,用放大器系数表示:
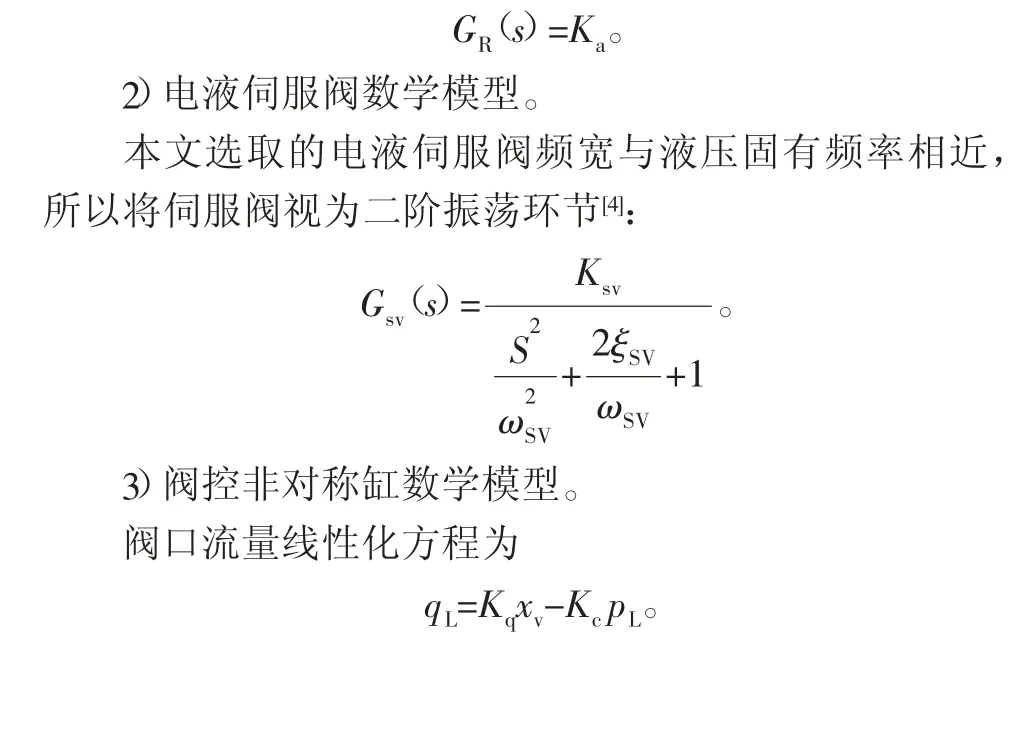
式中:Kq为电液伺服阀的流量增益;Kc为电液伺服阀的压力-流量系数;qL为电液伺服阀流量。
对其进行拉氏变换得
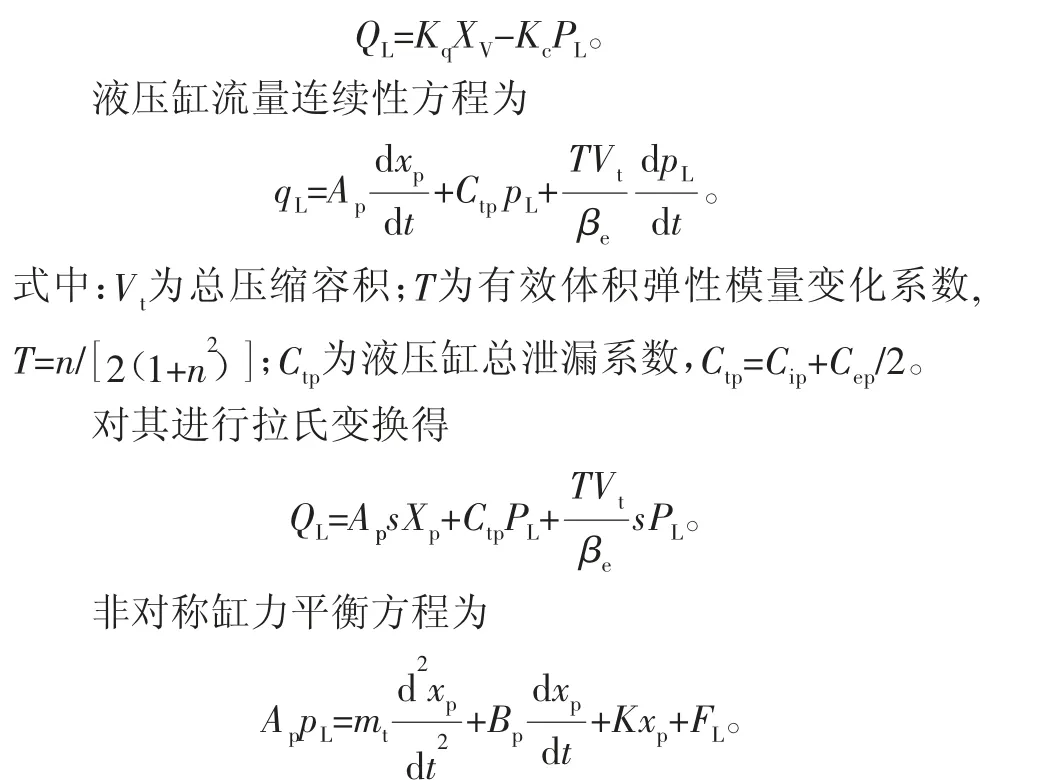
式中:mt为活塞及负载折算到活塞上的总质量;Bp为活塞及负载的黏性阻尼系数;K为负载弹簧刚度;FL为作用在活塞上的意外负载力。
对其进行拉氏变换得

联立三式,并对传递函数进行简化,得到阀控非对称
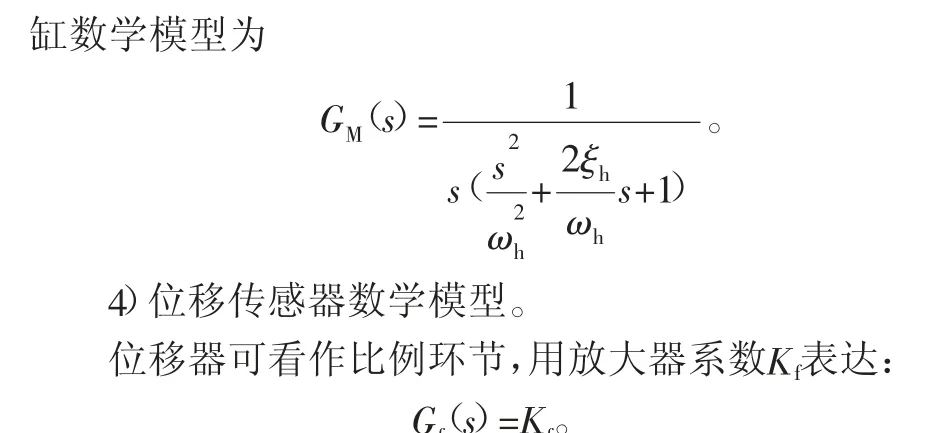
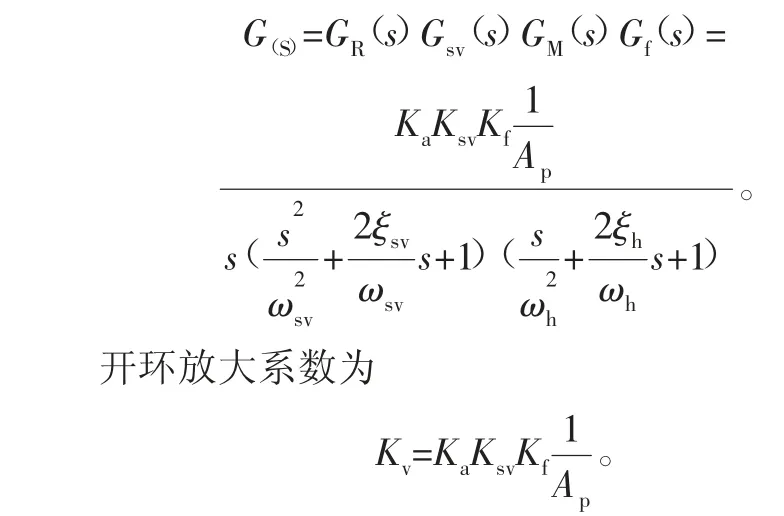
1.2 系统传递函数
电液伺服系统的开环传递函数为
2 专用吊具电液伺服系统普通PID控制器设计
普通PID控制将系统检测到的误差进行组合,然后反馈到被控对象上,对系统误差有很强的矫正能力。普通PID控制的数学表达式为

本文在MATLAB/Simulink中建立普通PID控制的电液伺服系统仿真模型,运用Z-N临界比例法确定比例系数上限后通过不断试凑,得到了控制效果最好的一组PID控制器参数,仿真结果如图1所示。
设定不同的KP、KI和KD等3个参数的取值,对比不同的KP、KI和KD等3个参数的取值对系统输入信号响应的影响。从图1中可以看出,设定KP=3.6、KI=1.5和KD=0.01时,系统的响应速度、系统的稳定时间和系统的稳态误差相比于其他几组表现更好,并且系统没有发生超调,此时PID控制的控制效果较好。
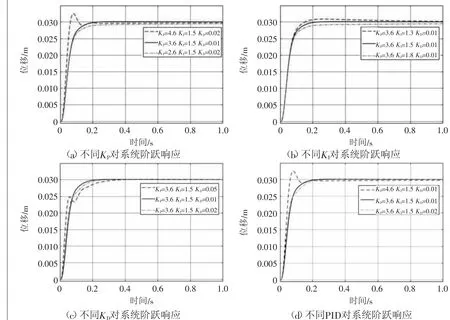
图1 基于电液伺服控制系统阶跃响应仿真结果
3 专用吊具电液伺服系统单神经元PID控制器设计
3.1 单神经元PID控制器设计
单神经元PID控制器控制原理如图2所示,单神经元PID控制具有结构简单、响应迅速的特点。
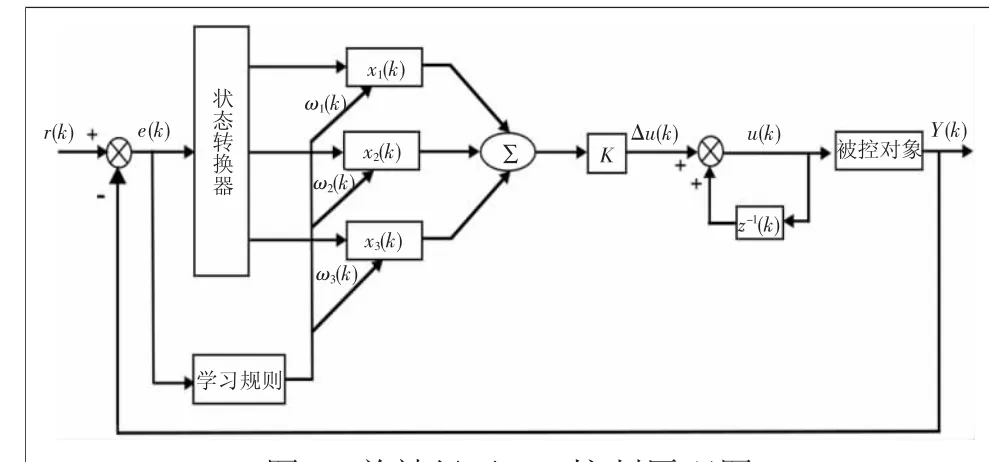
图2 单神经元PID控制原理图
单神经元PID控制器的学习规则分为无监督型和有监督型[5]。本文将采用有监督型Hebb学习规则。单神经元PID控制器的输出为:
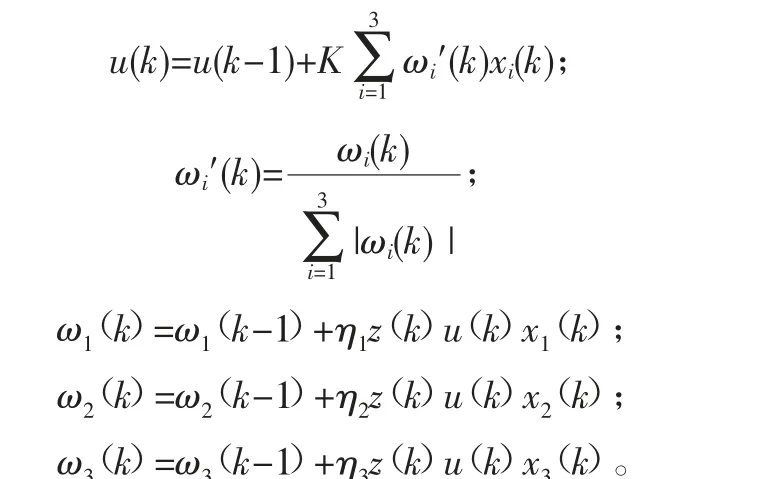
对比增量式PID控制模型可得,kω2、kω1、kω3分别对应于KP、KI、KD, 因此单神经元系数k和学习效率是影响最终输出结果的关键因素。单神经元系数k的数值选择是非常重要的,当k的取值越大,系统达到稳定的时间越短,但超调量也会增大,系统的振荡也会增大;当k的取值超过某一极限后,系统甚至会处于不稳定的状态。
将基于有监督型Hebb学习规则的单神经元PID控制算法编写成.m函数再封装成为s函数。建立的单神经元控制模块如图3所示。
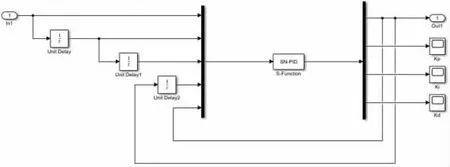
图3 单神经元控制模块
3.2 单神经元PID控制仿真分析
在MATLAB/Simulink中建立添加单神经元PID控制的专用吊具电液伺服系统与加普通PID控制的专用吊具电液伺服系统仿真模型,同时对两种控制方式的电液伺服系统输入一个阶跃信号,仿真结果如图4所示。
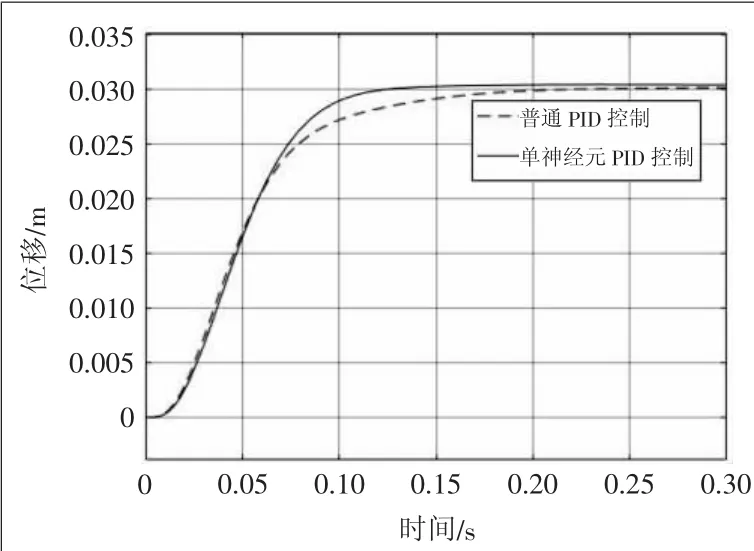
图4 单神经元PID控制与普通PID控制仿真曲线
对图4进行分析可得,改进型单神经元PID控制响应速度更快,相对于普通PID控制,改进型单神经元PID控制更早进入稳定状态,最终稳态误差略大于普通PID控制,但仍在设计要求允许范围之内。
4 结语
本文研究了风力发电机机舱轮毂专用吊具电液伺服系统的2种控制方式,在MATLAB/Simulink建立了仿真模型,对比分析仿真结果得出,单神经元PID控制稳定时间更短,控制效果良好,满足专用吊具的使用要求。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
起重运输机械(2021年21期)2021-11-24
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
测控技术(2018年12期)2018-11-25
专用汽车(2018年10期)2018-11-02
中国铸造装备与技术(2017年3期)2017-06-21
专用汽车(2016年4期)2016-03-01
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11