一种四自由度并联机构及运动学分析
2021-11-25 09:08李特奇周毅钧陈建鹏
机械工程师 2021年11期
李特奇,周毅钧,陈建鹏
(安徽理工大学机械工程学院,安徽淮南 232001)
0 引言
并联机构的发展突飞猛进,在理论上,并联机构的运动平台由多个支链支撑,使得该机构具有很高的结构强度[1-2]。基于并联机构的运动模拟器在民用、军用设施上都应用广泛。并联机构现有的6自由度运动模拟器在汽车制造、航空航天、船舶、机器人、工业及民用娱乐领域都有着广阔的应用。随着技术的发展,6自由度运动模拟器已成为一种高度耦合的系统,对其进行高精度的运动控制比较复杂。同时,6自由度并联机构运动模拟器造价高昂,缺乏低自由度并联机构的经济适用性。4自由度并联运动模拟器属于少自由度并联机构,常见的有2R2T型和3T1R型,该运动模拟器结构简单,充分考虑到设计、制造和控制的经济性[3]。
赵铁石等[4]首次提出了支链由简单串联链组成的3T1R 型对称4自由度并联机构;陈巧红等[5]运用李群理论对3T1R型并联机构自由度分岔特性进行了分析;张超等[6]对2RPU/2SPS并联机构进行了位置正反解研究和运动学传动性能研究。
同3自由度和6自由度并联机构相比,2R2T型4自由度并联机构问题相对复杂。李秦川等[7]首次提出了对称2R2T型4自由度并联机构;叶伟、张伟中等[8-9]分别提出了一种运动部分解耦的2R2T并联机构,并对该机构位置正反解、奇异位型和工作空间进行了分析。
根据车辆路面行驶时的运动特性,并结合2R2T型并联机构实际应用中的巨大潜力,本文提出了一种2RRS/2UPS并联机构,运用螺旋理论对该机构自由度进行分析,并确定了该机构合理的输入选取;采用运动影响系数理论,推导并联机构的一、二阶影响系数,并得到相应的数值算例,最后用Adams View软件对其建模、仿真,进行了数值验证。
1 建立模型
1.1 机构描述
2RRS/2UPS 并联机构采用5自由度支链添加约束,机构如图1所示。

图1 2RRS/UPS并联机构结构简图
2RRS/UPS 并联机构由定平台、动平台、2个RRS支链及2个UPS支链组成。两类支链在2个平台之间呈对称式分布。2个RRS支链的转动副轴线相互平行,所有支链都通过球铰与动平台连接。该并联机构定平台、动平台表面均为正方形,在两平台上分别建立定坐标系Oxyz和动坐标系Pxyz。定坐标系的原点为点O,处于x轴的A1A3和y轴的A2A4相交于点O,z轴垂直于定平台方向向上。动坐标系的原点为点P,在初始位置时,点P在点O正上方,两坐标系x、y轴分别平行。
1.2 自由度分析
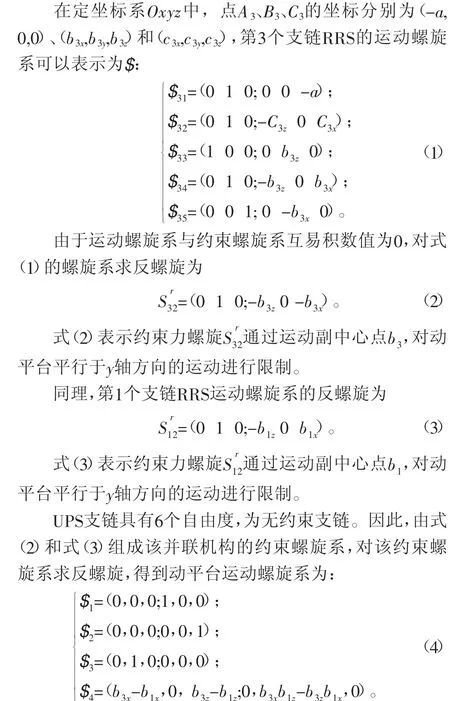
式(4)中,表明2RRS/2UPS并联机构动平台具有沿x轴、z轴移动及绕x轴、y轴转动的自由度,基于该机构设计的运动模拟器可实现纵向、升降、横滚、俯仰4种运动,侧向和偏航运动被限制。
修正的Grübler-Kutzbach自由度公式为

式中:λ为空间自由度;n为机构中含基连杆的连杆数目;fi为关节i具有的自由度;fp为所有的被动自由度。
将各参数代入式(5),得机构自由度为4。
2 位置分析
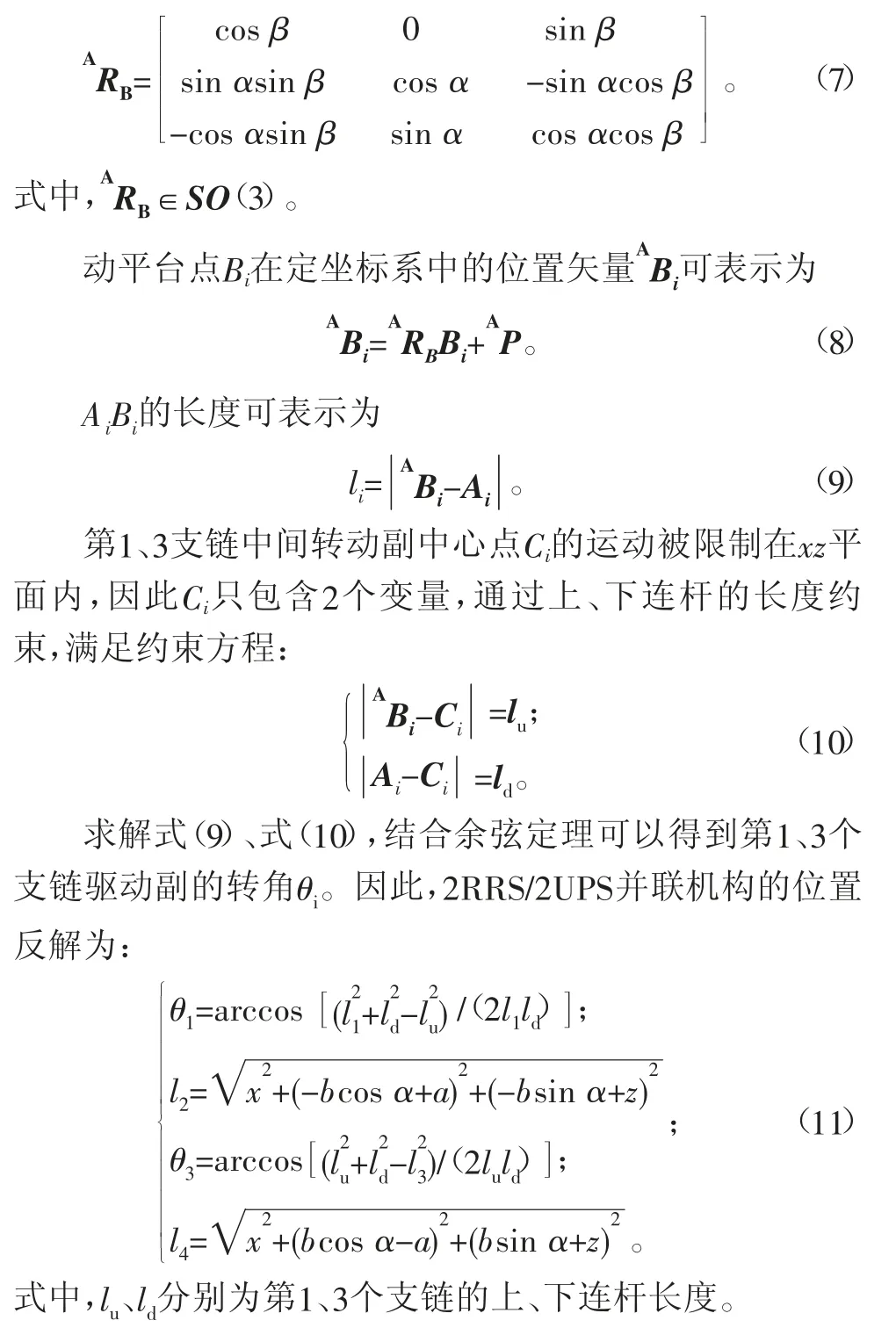
位置反解指已知动平台的位置和姿态来求解各支链驱动对应的输入量。本文机构的位置反解是给定动平台中心点的位置x、z(y=0)及转动角α、β(γ=0),求解机构4个驱动副的位移量或转动量。
Ai和Bi分别表示为点Ai在定坐标系中和点Bi在动坐标系中的坐标矢量,如表1所示。

表1 平台运动副中心点坐标矢量
动坐标系相对于定坐标系的位置用点P相对于点O的位置矢量记为AP表示,即

动坐标系相对于定坐标系的坐标旋转矩阵ARB=RX(α)RY(β),表示为
3 运动学分析
3.1 并联机构的一阶影响系数



3.2 数值算例
将a=200 mm、b=170 mm代入表1中,得到2RRS/2UPS并联机构定、动平台各运动副中心点参数。机构动平台的初始高度H=320 mm,支链1、3上连杆长度lu=172.1 mm,下连杆长度ld=193.1 mm。在初始时,动坐标系Pxyz和定坐标系Oxyz重合。
以上机构数据代入3.1节内容,所求2RRS/2UPS并联机构的一阶影响系数矩阵满秩,如式(16)所示:

给该机构驱动副一组驱动参数:支链1为-0.107 rad/s,支链3为-0.2312 rad/s,支链2和支链4为0.02 m/s。联立式(15)和式(16)可得动平台的输出速度为

选择X-Y-Z欧拉角对并联机构动平台的位置和姿态进行描述,设置动平台运动规律如下
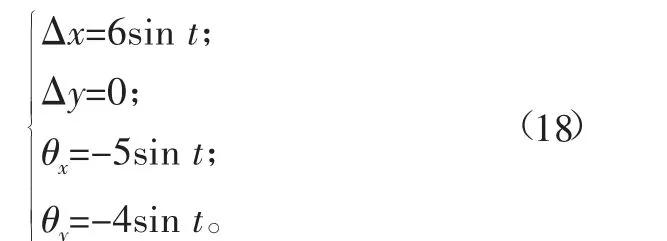
将式(18)给定动平台运动规律求导后可以得动平台的速度,再将第2节所求位置反解结果代入3.1节验证其正确性。最终得到的广义速度、广义加速度随时间变化的曲线分别如图3所示。

图2 RRS支链虚设机构简图
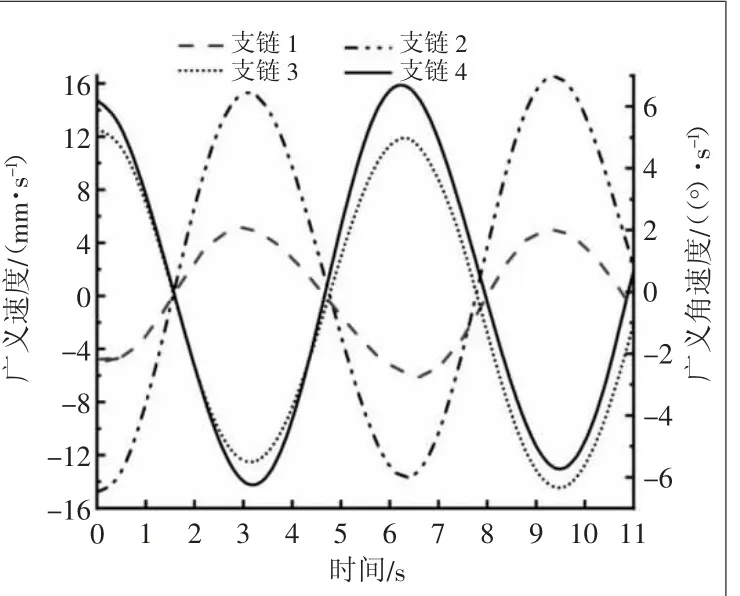
图3 支链广义速度曲线
3.3 Adams运动学仿真
为验证建立的并联机构运动学模型是否正确,在Adams View软件中建立了2RRS/2UPS并联机构的模型,如图4所示。按3.1节给机构驱动副一组驱动参数,运行交互仿真,设置仿真时间为0.1 s,步长为200,选取动平台中心点为标记点,绘制动平台中心点的移动速度和角速度,如图5所示。仿真结果表明,动平台中心点沿x、z轴的初速度分别趋近于-1.868 mm/s、20.88 mm/s,绕y轴的角速度趋近于0.0583(°)/s 即1.017×10-3rad/s。仿真结果与理论计算式(17)吻合。

图4 Adams View中的2RRS/2UPS机构模型
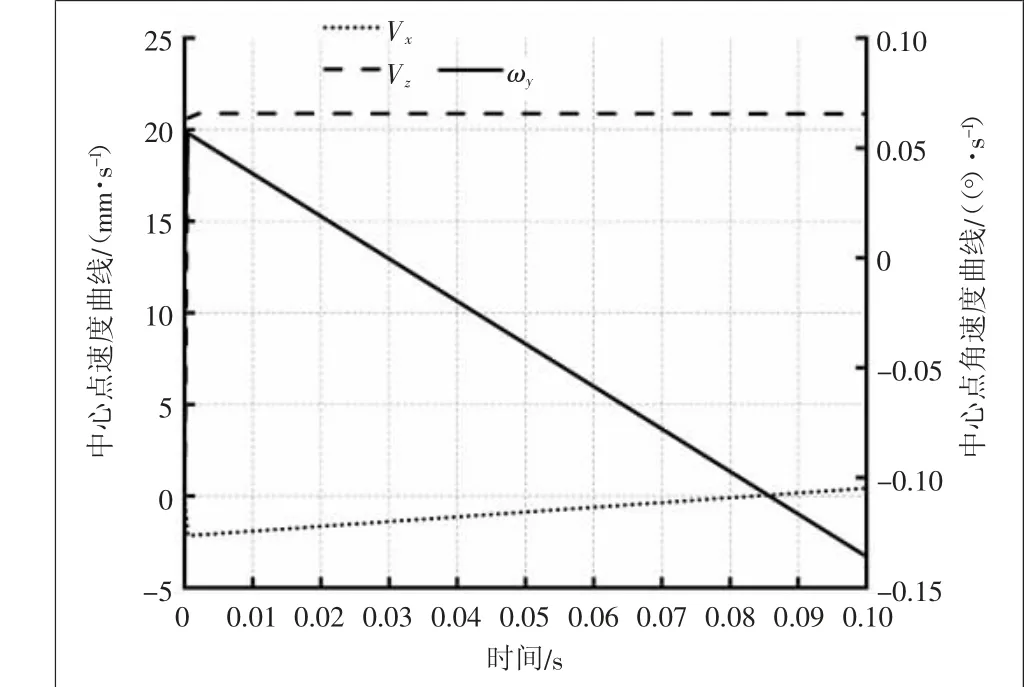
图5 Adams View 仿真的中心点速度曲线
将式(18)给定的动平台运动规律添加到动坐标系的点P处,运行交互仿真,设定仿真时间为11 s,步长为300。通过仿真并计算分别得到第1、3个支链驱动副的角速度,第2、4支链驱动副的速度。本文给出仿真计算结果中的广义速度曲线,如图6所示。仿真计算结果还显示,第1个、第3个驱动副绕定坐标系x轴、z轴的角速度趋于0。与图3对比,可以看出曲线光滑,数值计算与仿真结果一致。综上所述,机构理论计算和软件运动学仿真结果具有一致性,验证了机构设计的合理性。

图6 Adams View仿真的广义速度曲线
4 结语
提出了一种2RRS/2UPS并联机构,该机构属于2R2T型4自由度并联机构,基于该机构设计的车辆运动模拟器能够实现纵向、升降、横滚、俯仰4种运动的模拟。利用螺旋理论和运动影响系数理论,结合虚设机构法,可以用显示表达式合理反映输入空间对工作空间速度和加速度的线性映射。对2RRS/2UPS并联机构进行运动学仿真分析表明,该机构运动曲线光滑连续,几乎无突变,稳定可靠的运动特性为机构的高精度控制提供了便利,基于2RRS/2UPS并联机构开发的运动模拟器具有很大的应用潜力。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
大众摄影(2015年9期)2015-09-06
实用手外科杂志(2015年2期)2015-08-28
装备环境工程(2015年5期)2015-02-28
北京航空航天大学学报(2014年1期)2014-12-19